Изобретение относится к области приборостроения и может быть использовано при разработке и создании трехстепенных маятниковых гирокомпасов с торсионным подвесом чувствительного элемента (ЧЭ).
Предлагаемое изобретение имеет целью автоматическую компенсацию нуль- пункта гирокомпаса с торсионным подвесом ЧЭ,что позволяет повысить точность и быстродействие определения плоскости меридиана.
Сущность предлагаемого изобретения заключается в следующем.
Наблюдение за свободным движением ЧЭ проводят в режиме со включенной следящей системой. Тогда, если смещение нуль-пункта равно А()м то на ЧЭ состороны
его подвеса будет действовать момент сил кручения, равный
Ц кр k Анп, где k ()
Далее р где t/С угловое ускорение ЧЭ, а I - момент инерции вокруг вертикальной оси.
Тогда,
00
о ю
CJ
о о
# д
. Дг/ V дг -5-,
(2)
(3)
где приращение угловой скорости ЧЭ за время At.
Средние значения угловой скорости ЧЭ на интервалах времени A ti и A ta можно определить по выражениям
; ANi
AN2,м (4)
где A NI и A Na - разность отсчетов, снимаемых с углоизмерительного устрййст- ва гирокомпаса в известные фиксированные моменты времени (см.фиг.1).
Тогда из формул (2) - (4) следует, что
г.Ј
А N2 At2(Ati +At2)
ANr Ati (A:ti +At2)
Таким образом, снимая с помощью углоизмерительного устройства отсчеты, ха- рактеризующие положение ЧЭ в фиксированные моменты времени можно при известных параметрах гирокомпаса достаточно быстро определить величину нуль- пункта и скомпенсировать ее.
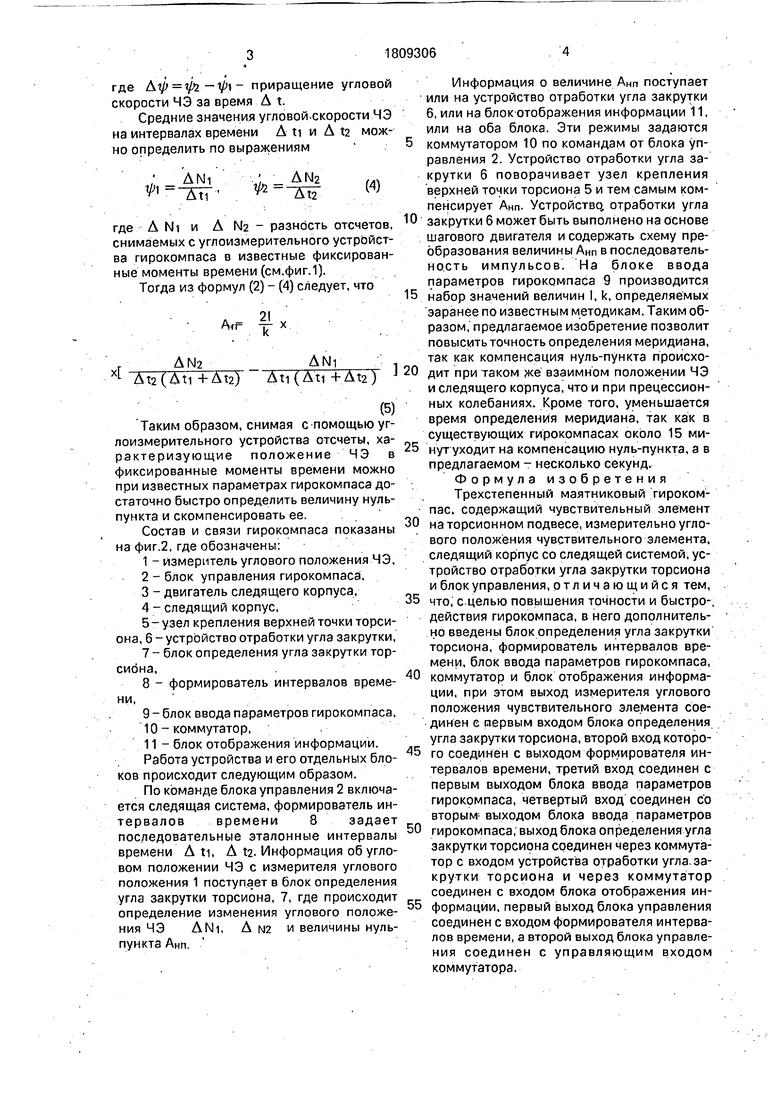
Состав и связи гирокомпаса показаны на фиг.2, где обозначены:
1 - измеритель углового положения ЧЭ,
2 - блок управления гирокомпаса.
3 - двигатель следящего корпуса,
4-следящий корпус,
5 - узел крепления верхней точки торси- она, 6 - устройство отработки угла закрутки,
7 - блок определения угла закрутки торсиона,
8 - формирователь интервалов времени,
9 - блок ввода параметров гирокомпаса,
10 - коммутатор,
11 - блок отображения информации.
Работа устройства и его отдельных блоков происходит следующим образом.
По команде блока управления 2 включается следящая система, формирователь интервалов времени 8 задает
последовательные эталонные интервалы времени A ti, A t2. Информация об угловом положении ЧЭ с измерителя углового положения 1 поступает в блок определения угла закрутки торсиона, 7, где происходит определение изменения углового положения ЧЭ ANi, A N2 и величины нуль- пункта Анп.
10
15
20
„р.
35
40
45
50
Информация о величине Анп поступает или на устройство отработки угла закрутки 6, или на блок отображения информации 11, или на оба блока. Эти режимы задаются коммутатором 10 по командам от блока управления 2. Устройство отработки угла закрутки 6 поворачивает узел крепления верхней точки торсиона 5 и тем самым компенсирует Анп. Устройство, отработки угла закрутки б может быть выполнено на основе шагового двигателя и содержать схему преобразования величины Анп в последовательность импульсов. На блоке ввода параметров гирокомпаса 9 производится набор значений величин I, k, определяемых заранее по известным методикам. Таким образом, предлагаемое изобретение позволит повысить точность определения меридиана, так как компенсация нуль-пункта происходит при таком же взаимном положении ЧЭ и следящего корпуса что и при прецессионных колебаниях. Кроме того, уменьшается время определения меридиана, так как в существующих гирокомпасах около 15 минут уходит на компенсацию нуль-пункта, а в предлагаемом - несколько секунд. Формула изобретения Трехстепенный маятниковый гирокомпас, содержащий чувствительный элемент на торсионном подвесе, измерительно углового положения чувствительного элемента, следящий корпус со следящей системой, устройство отработки угла закрутки торсиона и блок управления, отличающийся тем, что, с целью повышения точности и быстро-, действия гирокомпаса, в него дополнительно введены блок определения угла закрутки торсиона, формирователь интервалов времени, блок ввода параметров гирокомпаса, коммутатор и блок отображения информации, при этом выход измерителя углового положения чувствительного элемента соединен с первым входом блока определения угла закрутки торсиона, второй вход которого соединен с выходом формирователя интервалов времени, третий вход соединен с первым выходом блока ввода параметров гирокомпаса, четвертый вход соединен со вторым; выходом блока ввода параметров гирокомпаса, выход блока определения угла закрутки торсиона соединен через коммутатор с входом устройства отработки угла.за- крутки торсиона и через коммутатор соединен с входом блока отображения информации, первый выход блока управления соединен с входом формирователя интервалов времени, а второй выход блока управления соединен с управляющим входом коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| Способ определения поправки к положению динамического равновесия прецессионных колебаний наземного гирокомпаса с азимутальной следящей системой | 1980 |
|
SU1566872A1 |
| Способ приведения чувствительного элемента торсионного гирокомпаса в плоскость меридиана | 1976 |
|
SU571700A1 |
| Маятниковый гирокомпас | 1990 |
|
SU1779928A1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
Изобретение относится к приборостроению и может быть использовано при разработке и создании трехстепенных маятниковых гирокомпасов с торсионным подвесом чувствительного элемента. Цел.ь изобретения - повышение точности и быстродействия гирокомпаса. Гирокомпас содержит измеритель углового положения чувствительного элемента 1, следящий кор пус 4 с двигателем следящего корпусе 3. формирователь интервалов времени 8. tlr.oK ввода параметров гирокомпаса 9, блок определения угла закрутки торсиона 7, коммутатор 10, блок отображения информации 11, устройство отработки угла закрутки торсио на 6 с узлом крепления верхней точки тор сиона 5 и блок управления 2. По информации измерителя углового положе ния ИЭ 1, формирователя интервалов вре мени 8 и блока ввода параметров гирокомпаса 9 блок определения угла закрутки торсиона формируют поправку за нуль-пункт, которая автоматически компенсируется устройством отработки угла закрутки торсиона. 1 ил. со с
| Руководство к астрономо-геодезиче- ским работам при топогеодезическом обеспечении, ч.Ill, Гироскопическое ориентирование, Редакционно-издатель- ский отдел ВТС, М., 1979, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
