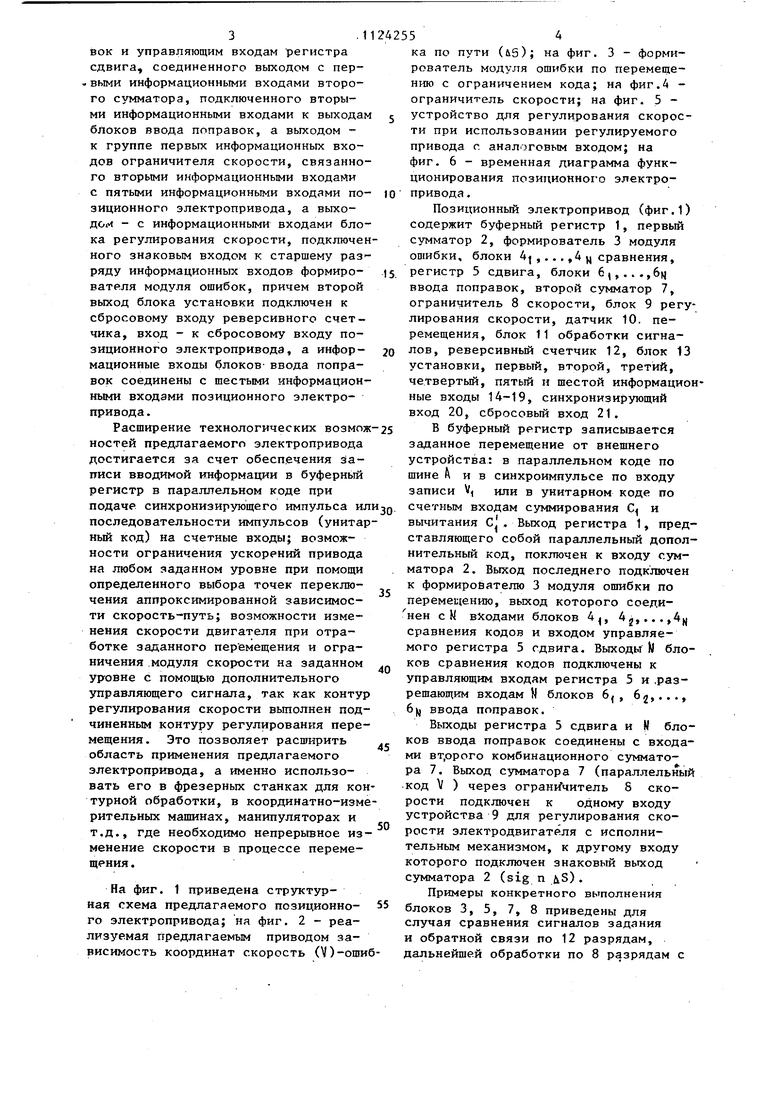
Изобретение относится к электротехнике, а именно к электроприводам, и может быть использовано в быстродействующих системах позиционного электропривода для металлорежущих станков, например, сверлильной, фрезерной группы, в координатно-измерительных машинах, манипуляторах и т.п. Известен позиционный электропривод, содержащий задатчик программы, реверсивный счетчик, управляемый де литель частоты, блоки сравнения кода и устройство для регулирования скоро ти электродвигателя lj . Недостатками устройства являются ограниченные технологические возможности, поскольку прием информации возможен только в -параллельном коде, и неравномерность перемещения при ко эффициентах деления делителя частоты не равных 2, где п - целое натуральное число (п 1,2,3...), что приводит к ограничению области прИ7 менения.. Наиболее близким к предлагаемому является позиционный электропривод,. содержащий последовательно соединенные устройство для регулирования ско рости электродвигателя с исполнитель ным механизмом, датчик перемещения, блок обработки сигналов датчика перемещения, реверсивный счетчик, сумматор и блок ограничения скорости. Электропривод содержит также последовательно соединенные- генератор, делитель частоты, второй реверсивный счетчик, коммутатор, два ключа и две схемы совпадения, причём управляющие входы ключей соединены с выходами коммутатора входы которого соединены с выходами реверсивных счетчиков и схем совпаде ния, через которые делитель частоты подключен к входам второго счетчика, третий вход одной системы совпадения соединен с выходом схемы сравнения, соединенной с вторым счет чиком 2 . Недостатком данного устройства являются также ограниченные технологические возможности, поскольку прием информации возможен только в параллельном - коде и допустимо лишь относительно небольшое число значени ускорения, обеспечивающих равномерное перемещение. Кроме того, скорость двигателя в процессе отработки заданного перемещения не изменяется Это связано, во-первых, с выполнением сумматора сигналов заданного и фактического перемещения на базе ревереивного счетчика и подключением его счетных входов к выходу датчика перемещения; во-вторых, с получением равномерного перемещения при исг/ользовании управляемого делителя частоты только при -коэффициентах деления в-третьих, с раздельным вьшолнением контуров регулирования скорости и перемещения, что позволяет применять описанный позиционный электропривод только в станках сверлильной группы и в некоторых видах фрезерных станков при обработке прямоугольньк поверхностей. Цель изобретения - расширение области применения позиционного электропривода . Поставленная цель достигается тем, что в позиционный электропривод, содержащий первый сумматор, ограничитель скорости и блок регулирования скорости, подключенный выхода.ми к входам датчика перемещений, соединенного выходом с. входами блока обработки сигналов, подключенного первыми информационными выходами к информационным входам реверсивного счетчика, вторым и третьим выходами - соответственно к первому и второму счетному входу, а четвертым выходом - к входу записи реверсивного счетчика, введешл блок установки, второй сумматор, регистр сдвига, формирователь модуля опшбки, N блоков ввода поправок, N блоков сравнения и буферный регистр, подключенный первым счетным входом, информационными входами и синхронизирующш4 входом соответственно к первому, второму и третьему информахщонным входам позиционного электропривода,сбросовым входом - к первому выходу блока установки, а выходом - к первым информационным входам первого сумматора, связанного вторьтми информационными входами с выходом реверсивного счетчика; а вькодом - с информационными входами формирователя модуля ойибки, подключенного выходом к информационным входам регистра сдвига и к информационным входам блоков сравнения, подклюгенных вторыми информационными входами к четвертым информационным входам позиционного электропривода, .а выходами - к разрешающим входам блоков ввода поправок и управляющим входам регистра сдвига, соединенного выходом с пер.выми информационными входами второго сумматора, подключенного вторыми информационными входами к выходам блоков ввода поправок, а выходом к группе первых информационных входов ограничителя скорости, связанного вторыми информационными входами с пятыми информационными входами поэиционного электропривода, а выходом - с информационными входами блока регулирования скорости, подключен ного знаковым входом к старшему разряду информационных входов формирователя модуля ошибок, причем второй выход блока установки подключен к сбросовому входу реверсивного счетчика, вход - к сбросовому входу позиционного электропривода, а информационные входы блоков- ввода поправок соединены с шестыми информационными входами позиционного электропривода . Расширение технологических возмож ностей предлагаемого электропривода достигается за счет обеспечения записи вводимой информации в буферный регистр в параллельном коде при подаче синхронизирующего импульса ил последовательности импульсов (унитар ный код) на счетные входы; возможности ограничения ускорений привода на любом заданном уровне при помощи определенного выбора точек переключения аппроксимированной зависимости скорость-путь; возможности изменения скорости двигателя при отработке заданного перемещения и ограничения модуля скорости на заданном урговне с помощью дополнительного управляющего сигнала, так как конту регулирования скорости вьшолнен под чиненным контуру регулирования пере мещения. Это позволяет расширить область применения предлагаемого электропривода, а именно использовать его в фрезерных станках для ко турной обработки, в координатно-изм рительных машинах, манипуляторах и т.д., где необходимо непрерывное из менение скорости в процессе перемещения . На фиг. 1 приведена структурная схема предлагаемого позиционного электропривода; на фиг. 2 - реализуемая ггредлагаемым приводом зависимость координат скорость (V)-oщи ка по пути (uS); на фиг. 3 - формирователь модуля ошибки по перемещению с ограничением кода; на фиг.А ограничитель скорости; на фиг. 5 устройство для регулирования скорости при использовании регулируемого привода с аналоговым входом; на фиг. 6 - временная диаграмма функционирования позиционного электропривода . Позиционный электропривод (фиг.1) содержит буферный регистр 1, первый сумматор 2, формирователь 3 модуля ошибки, блоки 4,...,4 ц сравнения, регистр 5 сдвига, блоки 6),...,6ц ввода поправок, второй сумматор 7, ограничитель 8 скорости, блок 9 регулирования скорости, датчик 10, перемещения, блок 11 обработки сигналов, реверсивный счетчик 12, блок 13 установки, первый, второй, третий, четвертый, пятый н шестой информационные входы 14-19, синхронизирующий вход 20, сбросовый вход 21. В буферный регистр записывается заданное перемещение от внешнего устройства: в параллельном коде по шине и в синхроимпульсе по входу записи V, или в унитарном коде по счетным входам суммирования С и вычитания CJ. Выход регистра 1, представляющего собой параллельный дополнительный код, поключен к входу сумматора 2. Выход последнего подключен к формирователю 3 модуля ошибки по перемещению, выход которого соединен сИ входами блоков 4, 42,...,4jj сравнения кодов и входом управляемого регистра 5 сдвига. Выходы W блоков сравнения кодов подключены к управляющим входам регистра 5 и .разрешающим входам V блоков 6, 63,..., 6|j| ввода поправок. Выходы регистра 5 сдвига и N блоков ввода поправок соединены с входами втррого комбинационного сумматора 7. Выход сумматора 7 (параллельный код V ) через ограничитель 8 скорости подключен к одному входу устройства 9 для регулирования скорости электродвигателя с исполнительным механизмом, к другому входу которого подключен знаковый выход сумматора 2 (sig п S). Примеры конкретного вьшолнения блоков 3, 5, 7, 8 приведены для случая сравнения сигналов задания и обратной связи по 12 разрядам, дальнейшей обработки по 8 разрядам с двумя точками переключения N 2 (фиг. 3-6). Формирователь 3 модуля сигнала ошибки (фиг.З) с ограничением входного кода может содержать логически элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 22-29, блок определения превьшения входным кодом величины (2 -1) на элементах ИСКЛЮЧАЮЩЕЕ ИЛИ 29-33 и 2 ИЛИ 34,., 342, 35 а также элементы 2 ИЛИ 3643, которые вместе с элементами 22используют для получения модуля огаи ки по 8 младшим разрядам. Формирова тель 3 при коде менее (2 -1) производит только формирование модуля сигнала (сигнал превышения л5 (2 - 1) - О). При сигнале превьшения 1 происходит формирование модуля кода AS с ограничением на уровне 8 младших разрядов. Управляемый регистр 5 сдвига в зависимости от комбинации на упра ляющих входах может производить сдв одновременно на п разрядов, что соответствует коэффициентам передачи 1; 1/2, 1/2, При комбинации на управлякнцих входах 00 регистр 5 не производит сдвига, при 01 производит сдвиг влево на 1 ра ряд, при 11 - сдвиг влево на 2 ра ряда. При этом коэффициенты передачи регистра 5 соответственно равны 1; 1/2; 1/4. Второй комбинационный сумматор 7 служит для суммирования выходного кода регистра 5 и значений поправок 8, ,85 ,...,0f . Сумматор 7 содержит N каскадно включенных комбинационных сумматоров. Ограничитель 8 скорости производит ограничение выходного кода сумматора 7 на уровне не более установленного значения по шине V Для 8-разрядного кода (фиг.4) ограничитель 8 содержит блок сравнения кодов V и V на логических элементах НЕ 44 - 51, сумматоры 52 и 53 и блок переключения на селекторах 54 - 57. Для определения V V код V представляется в дополнительном коде ( инвертируется элементами НЕ 44-51 и к младше му разряду сумматора 52 подается сигнал логической 1), а код V ,р прямом. В этом случае сигнал преV V - это сигнал переновышения53. При J выходной са сумматора код D V, код1) Блоки 4., 4 . .., 5 62,...,б/;/ и 7 служат для реализации оптимальной зависимости координат скорость-путь при позиционировании. При кусочно-линейной аппроксимизации зависимости скорость-путь (фиг.2) с N точками переключения с ограниченной величиной ускорения (а а ) шок на каждом N -ном участке движение описывается следующими выражениями: нулевой участок (от т.Одо т,1) Vo(i) :D, ь5(-Ь); первый участок (от т. 1 до т.2) V,(t) (t) +8, ; второй участок (от , 2 до т. 3) (i) - u5(t) + (5,+82); N -ный участок (от т.(М-1) до T,N V«(t) |w- US (4) + (В,+S, + ...), причем координату точек переключения и значения поправок выбирают в соответствии с уравнениями Г R 4 R - . ° D, R,U..,R..,.KM для случая изменения добротности на каждом участке по сравнению с предыдущим в 2 раза. Для формирования оптимальной зависимости координат модуль сигнала ошибки /iS / поступает на входы блоков 4, 42,...,4у сравнения, который управляют коэффициентом передачи регистра 5. На другие входы блоt , 4, ..., 4ц сравнения вводятся координаты точек k.5 ,1,5,..., uSy. В зависимости от величины /AS/ регистр 5 производит деление кода на 2, 4, 8,...,2 ,причем большему рассогласованию /45/ соответствует больший делитель. Блоки 6, 62, ..., 6ji ввода поправок соединены своими разрешающими входами с выходами , г --.м ответствующих блоков сравнения и в зависимости от величины делителя вводят константы 85, S, , 0)j, которые- суммируются с ходным кодом & регистра 5 при 71 щи сумматора 7. Критерием выбора то чек 1,2, ..., N (т.е. величин 45, , hS , и S , $2 , .. .8у) является ограничение величины допустимого ускорения (ограничение тока двигателя или нагрузок механизма), а коэффициента передачи регистра 5 при Д5 / л5 - максимальное значение добротности по скорости, определяемое полосой пропускания устройства 9 и свойствами исполнительного механизма. Устройство 9 для регулирования скорости может использовать регулируемый привод либо с аналоговым входом (аналоговый привод), либо с цифровым входом (цифровой привод). При использовании аналогового привода устройство 9 (фиг. 5) содержит преобразователь 58 код- аналог, пере ключатель знака- элемент НЕ 59, ключ 60, операционный усилитель 61 аналоговый привод 62. В случае использования в устройс ве 9 цифрового привода выходной код D ограничителя 8 и знак ошибки непосредственно используются для да нейшей обработки. Датчик 10 перемещения - фотоимпульсный (круговой или линейный типа ДФ, IGR, BE, IRC) или фаэоимпуль ный (резольвер двигателя, вращающий ся трансформатор или индуктосин). При использовании фотоимпульсного A чика перемещения, вьфабатывающего две .серии прямоугольных импульсову сдвинутых на 90°, блок 11 обработки формирует две последовательности импульсов по двум каналам, причем определенному направлению вращения соответствует наличие импульсов на одном канале. Эти последовательности импульсов по счетным входам и записываются в реверсивный счетчик 12. В этом случае блок обеспечивает на входе записи V счетчика 12 сигнал логического О При использовании фазоимпульсного датчика, вырабатывающего две серии синусоидальных импульсов, сдвинутых на 90 , блок 11 обработки формирует параллельный дополнительный код. Этот код по информационной щине 8 п синхроимпульсе по входу записи V передается в счетчик 12. В этом случае блок 11 обеспечивает на счет ных входах и С сигнал логи,ческой 1. В качестве блока 11 могут использоваться известные преобразователи амплитуда-код или фазакод . Блок 13 установки формирует импульсы сброса блоков 1 и 12 по входам сброса R и R, при включении питающей сети,а также при соответствующей команде извне. Электропривод работает следующим образом. В момент времени t| (фиг.6) производится включение питания и импульсом с выхода блока 13 установки буферный регистр 1 и реверсивный счетчик 12 по входам сброса R, , устанавливаются в нулевое положение. На выходах сумматора 2, формирователя 3 модуля, регистра 5, второго сумматора 7, ограничителя 8 по всем разрядам установлены сигналы логического О. На выходах блоков 4j(, Aj,..., сравнения также установлены сиг налы логического О, что соответствует максимальному коэффициенту передачи регистра 5 и запрету на ввод поправок S , S , 8|, к входу второго сумматора 7. При этом исполнительный механизм, входящий в состав устройства 9, удерживается (фиксируется) в нулевой координате с отклонением, не превьппающим ±1 дискрету по выходу счетчика 12. В момент времени 1.2 в регистр 1 от системы числового программного управления или ручного задатчика записывается величина заданного перемещения, а также производится установка ограничения скорости отработки м на входе ограничителя 8. Заданное перемещение может быть записано в параллельном либо унитар ном коде. Предположим, что 5С1А этом случае устройство 9 разгоняет исполнительный механизм до скорости, определяемой устав кой V , с предельным ускорением, которое зависит от уровня токо- ограничения, статической нагрузки механизма, суммарного момента инерции устройства 9. На выходах блоков 4, 4ft, , 4ц сравнения присутствуют сигналы логической 1 коэффициент передачи регистра 3 минимaлe {, на вход сумматора 7 поданы уставки §1 , 5 f . При дост;1жении величиной опгибки 5 значения, соответствующего точке Н ne-i реключения Лб i Ь5ц (момент времени i ) навыходе блока 4 появляется сигнал логического О, благодаря чему отключается блок 6ц ввода поправпк и производится логический сдвиг влево выходного сигнала регист ра 5 на один разряда (или, в общем случае, на ц разрядов). Это приводит к увеличению добротности D в 2 (или 2) раза и уменьшению поправки на величину 8), , что необходимо для излома аппроксимированной кривой ско рость-путь в точке N. При дальнейшем снижении ошибки Ь6 при 45 6 (момент времени -tg ) аналогично происходит отключение блока бц., ввода поправок и логичес кий сдвиг влево регистра 5,что при-; водит к увеличению добротности и уменьшению поправки на величину (N-1) ° соответствует излому криво скорость-путь в точке (N-1) и т.д. Следовательно, на каждом участке аппроксимированной кривой происходи движение с постоянной для данного участка добротностью DK , D(|,),.. ., D2, Df. Момент времени tg соответствует переходу со скорости v на аппроксимированную кривую. На каждом участке обеспечивается экспоненциальный характер из менения во времени координат путь, скорость и ускорение, т.е. подход к заданному значению перемещения с)существляется без перегулирования. На участке (0-1) обеспечивается мак симальное значение коэффициента передачи регистра 5, а следовательно.
максимальное значение добротности по скорости позиционного электропривода.
По окончании отработки в момент времени t uS 0. При этом так же, как и в нулевом положении, исполнительный механизм удерживается в заданной координате с отклонением не более +1 дискреты по выходе счетчика 12. При число точек переключения определяется величиной S од , а работа позиционного электропривода происходит аналогично описанному при Д S лЗц. Участок 0-1 характеристики позиционного электропривода может использоваться для реализации следующего режима благодаря высокому значению добротности по скорости. В этом случае целесообразно применять в качестве устройства для регулирования скорости электроприводы с широт-но-импульсными преобразователями, полоса пропускания которых не менее 100 Гц. Предлагаемое технической решение обеспечивает расширение области применения электропривода, который может применяться не только в станках сверлильной группы и некоторых видах фрезерных станков при обработке прямоугольных поверхностей, но и во фрезерных станках для контурной обработки, координатно-измерительных машинах, где необходимо непрерывное изменение скорости в процессе перемещения .
21
о-
«
1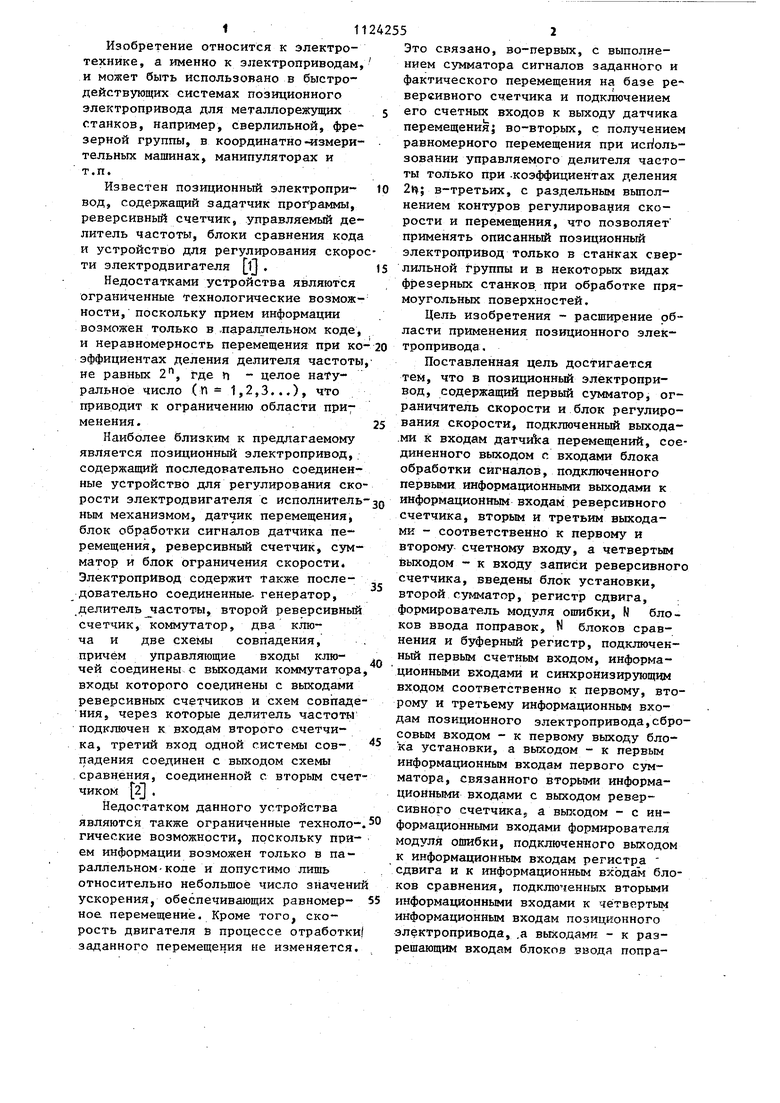


| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Линейно-круговой интерполятор | 1986 |
|
SU1312530A1 |
| Генератор псевдослучайных последовательностей | 1979 |
|
SU877533A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Устройство для преобразования непозиционного кода в позиционный код | 1987 |
|
SU1510097A1 |



ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД, содержащий первый сумматор, ограничитель скорости и блок регулирования скорости, подключенный выходами к входам датчика перемещений, соединенного выходом с входами блока обработки сигналов, подключенного первыми информационными выходами к информационным входам реверсивного счетчика, вторым и третьим выходами - соответственно к первому и второму счетному входу, a четвертым выходом - к входу записи реверсивного счетчика, отличающийс я тем, что, с целью расширения области применения, в него введены блок установки, второй сумматор, регистр сдвига, формирователь модуля ошибки, К блоков ввода поправок, М блоков сравнения и буферный регистр, подключенный первым счетным входом , информационными входами и синхронизирующим входом соответственно к первому, второму и третьему информационным входам позиционного электропривода, сбросовым входом - к первому выходу блока установки, a выходом I к первым информационным входам первого сумматора, связанного вторыми информационными входами с выходом реверсивного счетчика, a выходом с информационными входами формирователя модуля ошибки, подключенного выходом к информационным входам регистра сдвига и к информационнь1м входам блоков сравнения, подключенных вторыми информационными входами к четвертым информационным входам позиционного электропривода, a выходами - к разрешающим входам блоков ввода поправок и управляющим входам регистра сдвига, соединенного выходом с первыми информационными входами второго сумматора, подключенного вторыми информационными входами к выходам блоков ввода поправок, a выходом - к группе первых информационных входов ограничителя скорости, связанного вторыми информационными входами с пятыми информационными входами позиционного электропривода, a выходом - с информационными входами блока регулирования скорости, подключенного знаковым входом к старшему разряду информационных входов формирователя модуля ошибок, причем второй выход блока установки подключен к сбросовсжу входу реверсивного счетчика, вход - к сбросовому .входу позиционного электропривода, a информационные входы блоков ввода поправок,соединены с шестыми информационными входами позиционного электропривода .
Ы
200 15 Г -Ci
. V
иг.Т
фиг.З
25
г
Фи9. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 0 |
|
SU315160A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой позиционный электропривод | 1978 |
|
SU752712A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
