Изобретение относится к области эксплуатации электроэнергетических систем и .может бьпь использовано для оперативного контроля в процессе эксплуатации запаса статичесг ои устойчивости двигателей, синхроины.х генераторов и компенсаторов.
К современным электроэнергетическим системам предъявляется требование статической устойчивости (устойчивости в «малом) во всех воз.можных режимах работы, что достигается работой с некоторым нормативным запасом устойчивости.
В процессе эксплуатации возникает иеобходимость поддерживать запас статической устойчивости в определенных пределах, так как чрезмерное его чменьшение может привести к систеАи ой аварии с нарушением устойчивости, а необоснованное увеличение - к ухудшению экономичности работы энергосистемы из-за уменьшения передаваемой мощности, потери Г1гдроресурсов и т. д.
Для того, чтобы поддерживать запас устойчивости в заданных пределах, необходимо периодически определять действительный запас устойчивостп, с которым работает система.
Известен способ определения запаса статической устойчшюсти синхронной машины по амплитудно-фазовой .характеристике разомкнутой системы, определяемой путем подачи па вход измерительного органа регулятора
возбуждеиия пробного синусоидальиого сигнала меияющейся частоты и из.мерения вел чины пробного сигнала и вызванного им сигнала на .выходе системы регулирования. Однако при таком способе определения нельзя оперативно осуш,ествлять контроль запаса устойчивости ввиду большого объе.ма вычислительных работ. Кроме того, точность известного способа невелика.
Сущность описываемого способа заключается в том, что дополнительно измеряют вел,;1ЧИ11у регул 1 ювання, вызванную подачей пробного сигнала, на каждой частоте находят отношения сигналов па выходе систе.Л1Ы и пробного к сигналу ошибки регулирования и cy. этих отношений и в зависи.мости от полученных сигналов определяют запас статической устойчивости по модулю и фазе. При этом запас устойчивости по модулю определяют как величину, обратную отношению сигнала на выходе системы к сигналу ошнбки регулнрования, если указанная сумма отношений равна единице.
Запас устойчивости по фазе определяют как удвоенный а resin половины отношения пробного сигнала к сигналу ошибки регулирования, если отношение сигнала на выходе системы к сигналу ошибки регулирования равно единице.
вход измерительного органа регулятора возбуждения подают скачкообразный пробный сигнал, после окончания переходного процесса находят знак отношения сигнала на выходе системы к сигналу ошибки регулирования i при отрицательном знаке определяют запас по «сползанию как абсолютную величину этого отноатения.
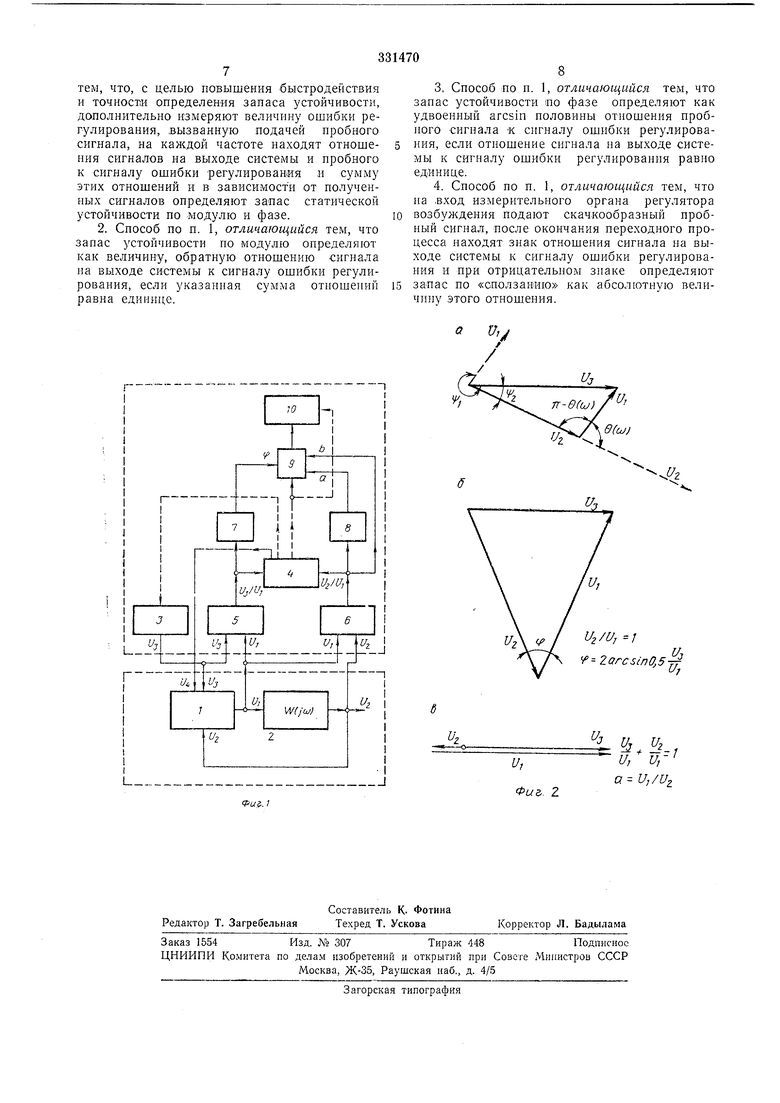
На ф-иг. 1 изображена структурная схема устройства для осуществления описываемого способа; ia фиг. 2 - векторные диаграммы сигналов системы автоматического регулирования (САР) синхронной машины.
Структурная схема САР синхронного генератора, работающего параллельно с сетью, представлена в виде двух блоков - измерительного органа регулятора напряжения 1 н всей оставшейся части системы 2 (силовой орган :регулятора, возбудитель, синхронный генератор), имеющей амплитудно-фазовую характеристику (АФХ) W{JM).
Для определения запаса устойчивости по фазе ф н по модулю а на вход измерительного органа регулятора напряжения 1 подают синусоидальное напряжения /з(7д,з sinco/ от генератора синусоидальных колебаний 5. Частоту со этого напряжения и его амплитуду и да изменяют с помощью блока управления 4.
Под воздействием иапряжения U на входе и выходе САР синхронного генератора устанавливаются синусоидальные колебания частоты со:
Ol /2 Uisin (ai/-fil)|),
/2 2 (/asin ( il;2), где Ui, Uz - действующие значения нанряжения;
1)1, ф2 - с|)азовые сдвиги. Для сигналов U, (/2, f/з справедливы следующие соотношения:
и, - и, ь
i2 -- -Ф1 в (со),
где с/1, Uz, Uu - векторы, изображающие синусодильные напряжения t/i, (/2, f/з.
На фиг. 2а показана векторная диаграмма напряжений t/j. Uz, и Uz для некоторой произвольной частоты со.
Векторы 1/1 и {/2 отстают по фазе от вектора (/3 соответственно на углы |)i и ;2. Сдвиг по фазе между векторами L/i н 0-2 составляет угол в (со).
При изменении частоты со векторная диаграмл1а деформируется, так как величины (/; н t/2 и сдвиги между векторами по с1)азе изменяются.
На фиг. 26 показана та же векторная диаграмма для частота со, при которой модуль W(/o) равен единице:
А (о/) 1
на запаса устойчивости по фазе связана с отношением зависимостью:
ср 2 arcsin 0,5 -.(И).
Таким образом, запас устойчивости по фазе ср можно определить по отношению действующих значений напряжений , измеренному лЧля частоты со , для которой выполняется условие 1.
0
На фиг. 2в показаиа векторная диаграмма для частоты со, при которой угол 0(о))л. Векторы UI, /2, 3 расположены на одной прямой. Отсюда следует, что для этой частоты справедливо соотношение.
5
-I
(III). Ui Ui
В этом случае запас устойчивости ло модулю обратно пропорционален отношению f/2./fA:
« -ц-иТакн.м образом, запас устойчивости по модулю й можно определить по отношению действующих значени напряжений Uz/U, измеренному для частоты со, для которой выполняется условие III.
Чтобы выяснить область работы сиихронного генератора и определить величину запаса устойчивости по «сползанию b (если гене0ратор работает в области искусственной устойчивости), на входе измерительного органа регулятора напряжения / скачкообразно изменяют напряжение задания на величину (Л и определяют величину и знак отношения напряжений LZ/UI на входе и выходе измерительного органа регулятора, обусловленных напряжением U.
Если U2/LJi 0, то геператор работает в области искусст1 енной устойчивости (см. с{)иг. 2) с запасо и устойчивости по «сползанию
-(Иг)iv)
Если (, то генератор работает в области естественной устойчивости.
о
Из изложенного становится понятным предлагаемый способ определения запаса статической устойчивости синхронной машины и принцип работы устройства для осуществления этого способа (см. (})иг. 1).
0
Устройство включает в себя генератор синусоидальных колебаний ,9, блок управления 4, блоки измерения отношения напряжений 5 и 6, функциональные -преобразователи 7 и S, коммутатор 9 и блок регистрации 10.
5
По команде, поступающей от блока управления 4, запускается генератор синусоидальных колебаний 3 и на вход измерительного органа регулятора напряжения У подается синусоидальное напрялсения Uy, некоторой фиксиео
. (I). рованной частоты СО. Через определенное время в системе устанавливаются синусоидальные колебания частоты соь Напряжения (/ и t/s поступают на вход блока 5, в котором осуществляется измерение отношения действующих
значений напряжений . Напряжения f/i и f/2 поступают на вход блока 6, в котором осуществляется измерение отношения действующих значений напряжений . Выходные сигналы блоков 5 и 6, пропорциональные отношениям Uz/Ui и , поступают в блок управления 4 и на вход функциональных преобразователей 7 и 5, в которых они преобразуются согласно условиям II и IV. Выходные сигналы функциональных преобразователей и блока 6 через коммутатор 9 поочередно могут быть поданы на блок регистрации 0.
В блоке управления 4 проверяются отношения (/2/f/i и f/3/f/i на выполнение условий I и III. При выполнении любого из этих условий блок управления запускает блок регистрации W. Если выполняется условие I, то блок управления переводит коммутатор 9 в положение, обеспечивающее регистрацию выходного сигнала функционального преобразователя 7, который равен запасу устойчивости по фазе ср. Если выполняется условие III, то блок управления переводит коммутатор 9 в положение, обеспечивающее регистрацию выходного сигнала функционального преобразователя 8, который равен запасу устойчивости по модулю а. Если условия I или III не выполняются, то регистрация не производится.
После завершения операций на частоте coi блок управления 4 подает на генератор синусоидальных колебаний 3 команду, обеспечивающую переход с частоты со на следующее фиксированное значение рабочей частоты «2. На частоте все операции повторяются. Цикл измерения запаса устойчивости по фазе и по модулю заканчивается после регистрации в блоке 10 величин ф и с или после обхода всех фиксированных значений частоты со.
После окончания цикла измерения ф и а блок управления скачком изменяет на величину /4 напряжение задания на входе измерительного органа регулятора напряжения У. После установления в системе нового в блоке управления определяется знак сигнала, который поступает из блока 6, измеряющего отношение напряжений Uz/Ui. Если , что свидетельствует о работе синхронной машины ;в области «искусственной устойчивости, то блок управления запускает блок регистрации 10 и одновременно переводит коммутатор 9 в положение, обеспечивающее регистрацию выходного сигнала блока 6, абсолютная велич.ина которого равна запасу устойчивости по «сползанию.
Измерение запаса устойчивости может быть выполнено и при ручном управлении. В этом случае необходим генератор синусоидальных колебаний 3 и измерители действующих значений напряжений Ui, U, U.
Описываемый способ определения запаса статической устойчивости синхронной машины отличается следующими принципиальными особенностями:
ра напряжения /. Благодаря этому отпадает необходимость в вычислении АФХ разомкнутой системы W(/co) по динамическим характеристикам отдельных элементов, так как измеряются величины, непосредственно связанные с этой системы; значительно сокращается время определения запаса устойчивости; появляется возможность полной автоматизации процесса измерения запаса устойчивости;
выполнение всех измерений упрощается, а их точность повышается, так как сигналы на входе и вы.коде измерительного органа регулятора напряжения, как правило, приведены к одному .масштабу и легко поддаются измерению.
2. Измерение сдвига по фазе между дву.мя синусоидальными напряжениями заменено измерением отношения действующих значений синусоидальных напряженнй. Как известно, устройства для измерения сдвига по фазе двух
низкочастотных напряжений (фазометры) обычно сложнее в конструктивном отношении и менее точны, че.л устройства, измеряющие действующие значения или отношения действующих значений тех же синусоидальных напряжен1и. Поэтому замена измерения сдвига по фазе измерением отношения действующих значений дает возможность упростить конструкцию и повысить точность измерения фазовых соотношений. Однотипность измерительных блоков является дополнительным преимуществом такой замены, так как упрощает изготовление и эксплуатацию устройства.
3.Выяснение области работы синхронно: машины и определение запаса устойчивости
по «сползанию (если маш.ина работает в области искусственной устойчивости) производится путем скачкообразного изменения напряжения задания регулятора напряжения. Благодаря это.му отпадает необходимость п
выполнении измерений на частотах, соответствующих ннзкочастотно.му участку АФХ разомкнутой снстемы. Значительно сокращается время определения запаса устойчивости по «сползанию, повышается точность измерения
и упрощается конструкция аппаратуры, используемой для этой цели.
4.В процессе измерения регистрируется только запас устойчивости по фазе ф, запас устойчивости по модулю о и запас устойчивости по «сползанию Ь. Пикакие другие параметры не регистрируются. Процесс измерения после определения величин ф, а, b заканчивается. Время измерения сокращается.
Предмет изобретения
1. Способ определения запаса статической устойчивости синхронной машины по амплитудно-фазовой характеристике разомкнутой
.0 системы, определяемой путем подачи на вход измерительного органа регулятора возбуждения пробного синусоидального сигнала меняющейся частоты и из.мерения величины пробного сигиала и вызванного им сигнала на вытем, что, с целью повышения быстродействия и точностей определения запаса устойчивости, дополнительно измеряют величину ошибки регулирования, вызванную подачей пробного сигнала, на каждой частоте находят отношения сигналов на выходе системы и пробного к сигналу ошибки регулирования и сумму этих отношений и в зависимости от полученных сигналов определяют запас статической устойчивости по модулю и фазе.
2. Способ по п. 1, отличающийся тем, что запас устойчивости по модулю определяют как величину, обратную отношению сигнала на выходе системы к сигналу ошибки регулирования, если указанная сумма отношений равна единице.
3.Спосо.б по п. 1, отличающийся тем, что запас устойчивости ио фазе определяют как удвоенный arcsin половины отношения пробного сигнала -к сигналу ошибки регулировакия, если отношение сигнала на выходе системы к сигналу ошибки регулироваиия равно единице.
4.Способ по п. 1, отличающийся тем, что на .вход измерительного органа регулятора
возбуждения подают скачкообразный пробный сигнал, после окончания переходного процесса находят знак отношения сигнала на выходе системы к сигналу ошибки регулирования и при отрицательном знаке определяют
запас по «сползанию как абсолютную величину этого отношения.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗАПАСА УСТОЙЧИВОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU270859A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| СИСТЕМА МОНИТОРИНГА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ ВОЗБУЖДЕНИЯ И СИСТЕМ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ЭЛЕКТРОСТАНЦИИ | 2013 |
|
RU2509333C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| Устройство для определения предела статической устойчивости синхронной машины | 1971 |
|
SU454658A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| СПОСОБ ФОРМИРОВАНИЯ МНОГОФАЗНОЙ СИСТЕМЫ ЧАСТОТНОРЕГУЛИРУЕМЫХ СТУПЕНЧАТО- СИНУСОИДАЛЬНЫХ НАПРЯЖЕНИЙ | 1973 |
|
SU388344A1 |
,; f 2arc5in0.5-7r
7
