Данное изобретение быть использовано для оперативного контроля устойчивости систем автоматического регулирования (САР) в процессе нормальной эксплуатации и при экспериментальном исследовании.
Известны устройства для определения запаса устойчивости САР, содержащие генератор синусоидальных колебаний и блоки для измерения отношения амплитуд сигналов.
Предлагаемое устройство отличается тем, что оно дополнительно содержит блоки коммутации и регистрации, блок управления, связаняый с генератором, блоком коммутации и блоком регистрации, и два функциональных блока для вычисления запаса по фазе и по модулю, выходы которых через блок коммутации соедипены с блоком регистрации, причем вход первого функционального блока подключен к первому блоку для измерения отношения амплитуд, связанному с блоком управления, генератором и выходом измерительноТо блока регулятора, а вход второго функционального блока подключен ко второму блоку для измерения отношения амплитуд, соединенному с блоком управления, выходом измерительного блока регулятора и выходом системы.
На фиг. 1 представлена блок-схема устройства для определения запаса устойчивости одноконтурной САР, которая показана в виде замкнутой структуры, состоящей из двух частей: измерительного блока регулятора 1 и всей оставшейся САР 2, амплитудно-фазовая характеристика (АФХ) которой равна АФХ разомкнутой системы W{jco).
Устройство включает в себя генератор 3 синусоидальных колебаний, блок 4 управления, блоки 5 и 5 измерения отношения амплитуд синусоидальных сигналов, функциональные преобразователи-блоки 7 и 8, блок 9 коммутации и блок 10 регистрации.
Для определения запаса устойчивости в процессе эксплуатации САР на в.ход измерительного блока регулятора / подают синусоидальный сигнал X3 3-Sincot от генератора 3. Частоту этого сигнала ш и его амплитуду Х изменяют с помощью блока 4.
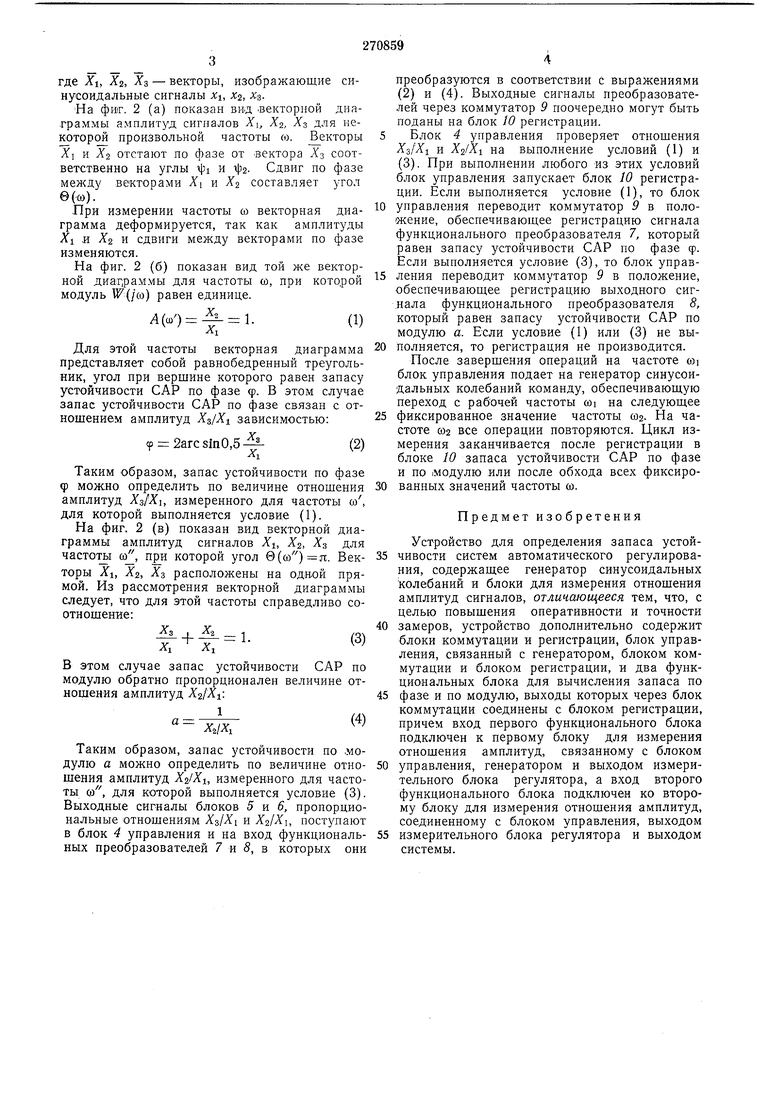
Под воздействием сигнала Хз на входе и выходе части САР 2 устанавливаются синусоидальные колебания
Xi - Xi-Sm(()) и 2 .Х2 sin ((B/-|-a|32) где Xi, Xz - амплитудные значения; фь - фазовые сдвиги. где Xi, Xz, Хг - векторы, изображающие синусоидальные сигналы Xi, X2, K-i. На фиг. 2 (а) показан вид .векторной диаграммы амплитуд сигналов Xi, Xz, Хз для некоторой произвольной частоты со. Векторы А и Х отстают по фазе от вектора Хз соответственно на углы -ф и Сдвиг по фазе между векторами 1 и Х составляет угол .При измерении частоты со векторная диаграмма деформируется, так как амплитуды Xi .и Xz и сдвиги между векторами по фазе изменяются. На фиг. 2 (б) показан вид той же векторной диаграммы для частоты со, при которой модуль W(JK) равен единице. лк) 1. 1 Для этой частоты векторная диаграмма представляет собой равнобедренный треугольник, угол при вершине которого равен запасу устойчивости САР по фазе ф. В этом случае запас устойчивости САР по фазе связан с отношением амплитуд Хз/Xi зависимостью: P 2arcslnO,(2) Таким образом, запас устойчивости по фазе Ф можно определить по величине отношения амплитуд Хз/Xi, измеренного для частоты со , для которой выполняется условие (1). На фиг. 2 (в) показан вид векторной диаграммы амплитуд сигналов Xi, Х, Хз для частоть со, которой угол в(со)я. Векторы Xi, Хч, Х- расположены на прямой. Из рассмотрения векторной диаграммы следует, что для этой частоты справедливо соотношение:1 21 X. этом случае запас устойчивости САР по модулю обратно пропорционален величине отношения амплитуд XzJX-i. а TF Таким образом, запас устойчивости по .модулю а можно определить по величине отношения амплитуд XzlX-i, измеренного для частоты 0), для которой выполняется условие (3). Выходные сигналы блоков 5 и 6, пропорциональные отношениям и XzlX, поступают в блок 4 управления и на вход функциональных преобразователей 7 и 5, в которых они 5 10 15 20 25 30 35 40 45 50 55 преобразуются в соответствии с выражениями (2) и (4). Выходные сигналы преобразователей через коммутатор 9 поочередно могут быть поданы на блок 10 регистрации. Блок 4 управления проверяет отношения зД1 и на выполнение условий (1) и (3). При выполнении любого из этих условий блок управления запускает блок 10 регистрации. Если выполняется условие (1), то блок управления переводит коммутатор 9 в положение, обеспечиваюш,ее регистрацию сигнала функционального преобразователя 7, который равен запасу устойчивости САР по фазе ф. Если выполняется условие (3), то блок управления переводит коммутатор 9 в положение, обеспечивающее регистрацию выходного сигнала функционального преобразователя 8, который равен запасу устойчивости САР по модулю а. Если условие (1) или (3) не выполняется, то регистрация не производится. После завершения операций на частоте coi блок управления подает на генератор синусоидальных колебаний команду, обеспечивающую переход с рабочей частоты coi на следующее фиксированное значение частоты сог. На частоте а)2 все операции повторяются. Цикл измерения заканчивается после регистрации в блоке 10 запаса устойчивости САР по фазе и по Модулю .или после обхода всех фиксированных значений частоты со. Предмет изобретения Устройство для определения запаса устойчивости систем автоматического регулирования, содержащее генератор синусоидальных колебаний и блоки для измерения отношения амплитуд сигналов, отличающееся тем, что, с целью повышения оперативности и точности замеров, устройство дополнительно содержит блоки коммутации и регистрации, блок управления, связанный с генератором, блоком коммутации и блоком регистрации, и два функциональных блока для вычисления запаса по фазе и по модулю, выходы которых через блок коммутации соединены с блоком регистрации, причем вход первого функционального блока подключен к первому блоку для измерения отношения амплитуд, связанному с блоком управления, генератором и выходом измерительного блока регулятора, а вход второго функционального блока подключен ко второму блоку для измерения отношения амплитуд, соединенному с блоком управления, выходом измерительного блока регулятора и выходом системы.
Фие I
V,
у.
тг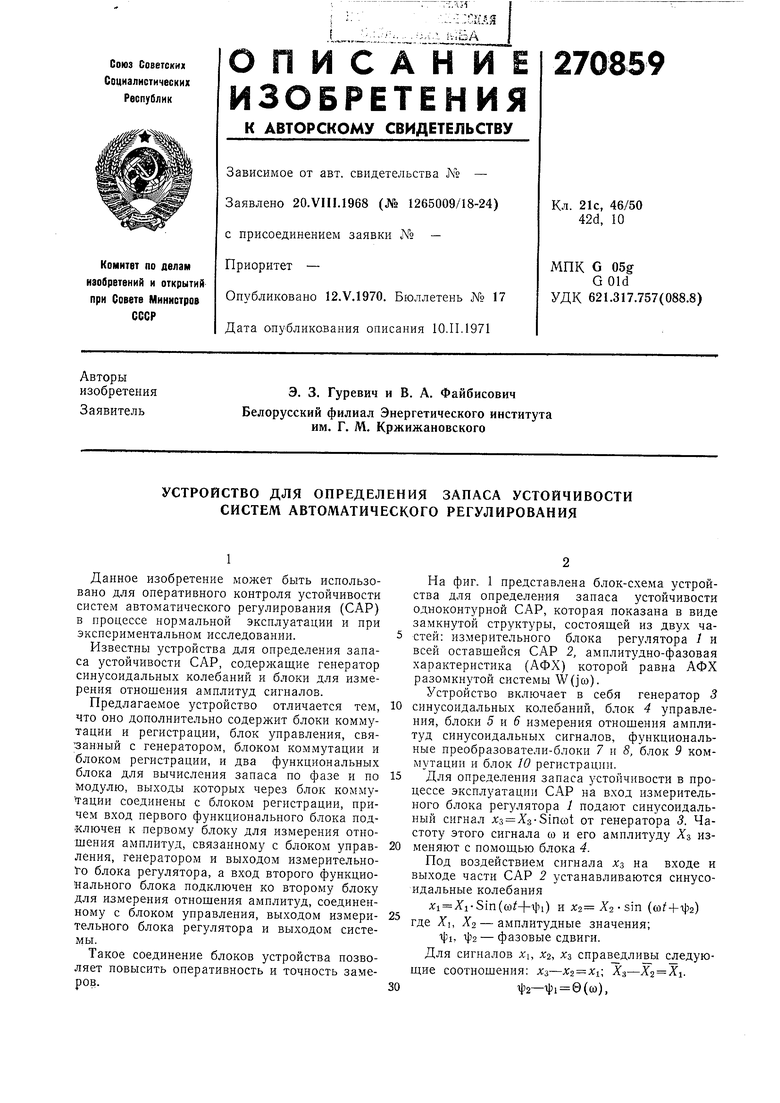
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСА СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ СИНХРОННОЙ МАШИНЫ | 1972 |
|
SU331470A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| Устройство для геологоразведки | 1979 |
|
SU807190A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Устройство для контроля параметров линейных интегральных микросхем | 1981 |
|
SU981906A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |

