Изобретение относится к электрическим самонастраивающимся системам управления, а именно к области адаптивных систем управления с пробным гармоническим сигналом, и предназначено для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами.
Наиболее близким по технической сущности к предлагаемому решению является самонастраивающаяся система управления с гармоническим пробным сигналом (патент РФ №2068196, кл. G05B 13/02), содержащая регулятор, объект управления, выход которого подключен к первому входу измерителя амплитуды и фазы, первый вход которого соединен с первым входом вычислительного блока, выход которого соединен с входом подстройки параметров регулятора, сигнальный вход которого соединен с выходом устройства сравнения, первый вход которого является входом задания системы, сумматор и генератор пробных гармонических колебаний, блок фазовой подстройки, вход которого соединен с вторым выходом измерителя амплитуды и фазы, заграждающий фильтр и блок вычисления коэффициентов заграждающего фильтра, вход которого соединен с выходом блока фазовой подстройки, подключенным к второму входу вычислительного блока и к входу генератора пробных гармонических колебаний, выход которого соединен с вторым входом измерителя амплитуды и фазы и с первым входом сумматора, второй вход которого подключен к выходу регулятора, а выход к входу объекта управления, выход которого соединен с информационным входом заграждающего фильтра, подключенного выходом к второму входу устройства сравнения, а управляющим входом к выходу блока вычисления коэффициентов заграждающего фильтра.
Недостатки известного устройства связаны с тем, что определение настроек регулятора происходит путем поиска одной «характерной» точки амплитудно-фазовой характеристики (АФХ) объекта управления, в частности точки, фаза которой равна -π и последующего использования эмпирического метода Циглера-Никольса расчета параметров ПИД-регулятора. При этом, в известном устройстве практически невозможно оценить качество получаемых в процессе адаптации настроек регулятора, относящихся к работе системы в целом, а именно: оценить наиважнейший показатель функционирования системы управления - запасы устойчивости по амплитуде и фазе. Таким образом, известное устройство не осуществляет непрерывный контроль результатов полученных оптимальных настроек, то есть не контролирует АФХ разомкнутой системы управления на частоте пробных колебаний.
При проведении процесса адаптации требуются априорные данные хотя бы о коэффициенте усиления объекта управления. Они необходимы для задания подходящей амплитуды пробных колебаний, подаваемых генератором синусоидальных колебаний на вход объекта управления. Амплитуда пробной гармоники на входе объекта должна быть, с одной стороны, достаточной для выделения пробной гармоники в выходном сигнале объекта на фоне шумов и, с другой стороны, не столь большой, чтобы вывести объект из режима нормального функционирования. Это обстоятельство ограничивает область применения известного устройства.
Задачей изобретения является обеспечение и непрерывный контроль заданных запасов устойчивости в системе при оптимальных настройках ПИД-регулятора при одновременном осуществлении безыдентификационного подхода построения адаптивной системы управления, когда при функционировании системы нигде в явном виде не используется математическая модель объекта управления,
Техническим результатом является исключение из контура заграждающего фильтра и связанных с его наличием негативных эффектов процесса самонастройки, а также расширение амплитудного диаппазона работы путем организации специального контура стабилизации амплитуды пробной гармоники на выходе объекта управления, позволяющее работать с малой амплитудой на выходе объекта управления, и, как следствие, расширение области применения адаптивной системы.
Указанный результат достигается тем, что в адаптивную систему управления, содержащую регулятор, первый вход которого подключен к входу адаптивной системы управления, а выход через последовательно соединенные сумматор, объект управления к первому входу первого измерителя амплитуды и фазы, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора и через вычислительный блок к второму входу регулятора, выход генератора подключен к второму входу сумматора и второму входу первого измерителя амплитуды и фазы, введены второй измеритель амплитуды и фазы, первый и второй входы которого подключены к выходу сумматора и выходу генератора соответственно, вычислитель амплитудно-фазовой характеристики, выход амплитуды которого подключен к второму входу вычислительного блока, а первый и второй входы подключены к первому и второму выходам второго измерителя амплитуды и фазы, выход фазы вычислителя амплитудно-фазовой характеристики подключен к входу блока фазовой автоподстройки частоты, третий измеритель амплитуды и фазы, первый и второй входы которого подключены к выходу регулятора и выходу генератора соответственно, а выходы амплитуды и фазы подключены к третьему и четвертому входам вычислителя амплитудно-фазовой характеристики, блок автоподстройки амплитуды, подключенный между выходом амплитуды первого измерителя амплитуды и фазы и вторым входом генератора, а выход объекта управления подключен к третьему входу регулятора.
Кроме того, регулятор выполнен на основе цифрового скоростного ПИД-регулятора,
- первый и второй и третий измерители амплитуды и фазы выполнены на основе фильтров Фурье.
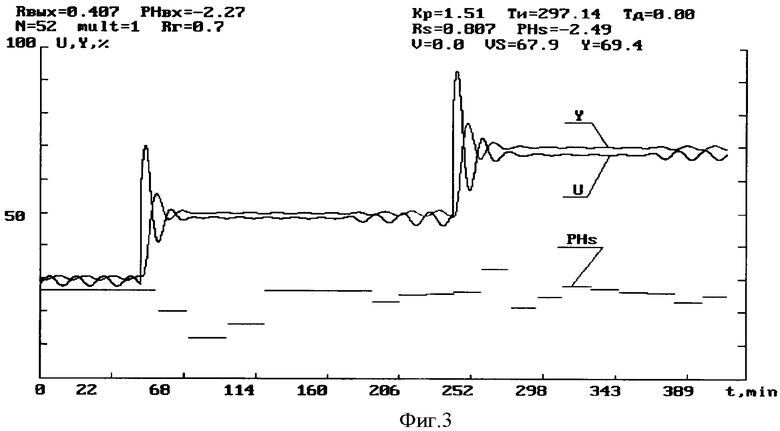
Изобретение поясняется с помощью чертежей, где на Фиг.1. показана структурная схема адаптивной системы управления, на Фиг.2. - график работы адаптивной системы управления при самонастройке, на Фиг.3 - график работы адаптивной системы управления при отработке задающих воздействий.
Адаптивная система управления содержит регулятор 1, первый вход которого подключен к входу адаптивной системы управления, а выход через последовательно соединенные сумматор 2, объект управления 3 - к первому входу первого 4 измерителя амплитуды и фазы, блок 5 фазовой автоподстройки частоты (БФАЧ), выход которого подключен к входу генератора 6 и через вычислительный блок 7 к второму входу регулятора 1, выход генератора подключен к второму входу сумматора 2 и второму входу первого измерителя амплитуды и фазы, второй 8 измеритель амплитуды и фазы, первый и второй входы которого подключены к выходу сумматора и выходу генератора соответственно, вычислитель 9 амплитудно-фазовой характеристики, выход амплитуды которого подключен к второму входу вычислительного блока, а первый и второй входы подключены к первому и второму выходам второго измерителя амплитуды и фазы, выход фазы вычислителя амплитудно-фазовой характеристики подключен к входу блока фазовой автоподстройки частоты, третий 10 измеритель амплитуды и фазы, первый и второй входы которого подключены к выходу регулятора и выходу генератора соответственно, а выходы амплитуды и фазы подключены к третьему и четвертому входам вычислителя амплитудно-фазовой характеристики, блок 11 автоподстройки амплитуды, подключенный между выходом амплитуды первого измерителя амплитуды и фазы и вторым входом генератора. Выход объекта управления подключен к третьему входу регулятора. При этом регулятор выполнен на основе цифрового скоростного ПИД-регулятора, а первый второй и третий измерители амплитуды и фазы выполнены на основе фильтров Фурье.
Для большинства промышленных объектов управления вектор АФХ разомкнутой оптимально настроенной системы занимает положение Wp.c (jω)=0.8·е-j·2.62 на частоте, соответствующей периоду Трез=mTи, где при отсутствии каких-либо априорных сведений о динамике объекта расчетную величину m целесообразно выбирать m≈3.5 [1].
Поэтому контур адаптации предлагаемой адаптивной системы осуществляет контроль и стабилизацию вектора амплитудно-фазовой характеристики (АФХ) разомкнутой системы управления в заданном положении Wр.c.(jω)=0.8·е-j·2.62, в отличие от прототипа, без использования заграждающего фильтра в структуре основного контура регулирования. Для оценки вектора АФХ разомкнутой системы добавлена новая точка отбора сигнала: выход ПИД-регулятора Up. Данный сигнал анализирует третий измеритель амплитуды и фазы (третий фильтр Фурье).
Адаптивная система управления работает следующим образом.
На вход объекта управления поступает сумма управляющего и пробного гармонического, формируемого генератором, сигналов Up(t)+Uг(t). Особенность работы системы в необходимости установки предварительных настроек ПИД-регулятора, в противном случае невозможна оценка вектора АФХ-системы. Второй вычислитель амплитуды и фазы (второй фильтр Фурье) осуществляет оценку установившихся значений амплитуды Rвх и фазы φвх пробных колебаний на входе объекта управления U(t). Третий фильтр Фурье оценивает Rp и φр в выходном сигнале Up(t) регулятора. Затем вычислитель АФХ определяет вектор комплексной характеристики разомкнутого контура управления Rc, φс на частоте тестового сигнала ω. Использование двух фильтров Фурье необходимо для оценки вектора АФХ в замкнутом контуре.
Поиск и отслеживание частоты, на которой фазовый сдвиг системы φс равен φз=-2.62 рад осуществляется блоком фазовой автоподстройки частоты (БФАЧ). Вычислительный блок производит расчет настроек ПИД-регулятора kp, Ти, Тд при достижении фазой φс с определенной точностью значения φз=-2.62 рад по формулам:
 ;
;  ;
;  ,
,
где j - номер текущего периода перестройки регулятора,
 - значение амплитуды вектора АФХ системы, в котором его надо стабилизировать,
- значение амплитуды вектора АФХ системы, в котором его надо стабилизировать,
Ти и Тд - параметры настройки адаптивной системы управления, нормированные по периоду квантования Tq,
Nj=2π/(ωTq) - нормированный период пробных колебаний,
m - выбирается в районе 3,5.
Таким образом, параметры настройки регулятора зависят от своих предыдущих значений.
Третий 10 фильтр Фурье оценивает значения амплитуды Rp и фазы φр гармоники с частотой пробных колебаний ω на выходе регулятора.
Если обозначить выходной сигнал регулятора V=Up, а выходной сигнал генератора χ=Uг, тогда оператор выхода регулятора относительно генератора определяется следующим выражением:
 .
.
Зависимость фазы от частоты пробной синусоиды ω на выходе регулятора имеет вид:
ϕp(ω)=arg{Фχv(jω)}=arg{-Wпид(jω)Woy(jω)}-arg{1+Wпид(jω)Woy(jω)}.
Следующая разность:
ϕp(ω)-ϕвх(ω)=arg{-Wпид(jω)Woy(jω)}=arg{Wпид(jω)Woy(jω)}-π, откуда ϕc(ω)=arg{Wпид(jω)Woy(jω)}=ϕр(ω)-ϕвх(ω)+π.
Следовательно, вычислитель 9 амплитудно-фазовой характеристики для получения на j-м цикле самонастройки несмещенной оценки фазы вектора АФХ разомкнутой системы должен использовать следующий алгоритм работы:
 .
.
В адаптивный регулятор, кроме основных блоков, входит также контур стабилизации амплитуды пробных колебания. Он состоит из первого фильтра Фурье и блока автоподстройки амплитуды (БАА). Такой контур необходим, так как при управлении технологическим процессом с переменными параметрами его коэффициент усиления может меняться в широких пределах, при этом желательно, чтобы уровень пробной гармоники на выходе объекта не превышал наперед заданной величины  диапазона изменения выходной переменной. БАА по текущей оценке амплитуды Rвых(j) на j-м цикле адаптации изменяет амплитуду пробной синусоиды генератора:
диапазона изменения выходной переменной. БАА по текущей оценке амплитуды Rвых(j) на j-м цикле адаптации изменяет амплитуду пробной синусоиды генератора:
 .
.
Работа блоков, входящих в структуру системы управления может быть описана следующим образом.
Генератор 6 пробных гармонических колебаний формирует пробный сигнал:
Uг[k]=Rг sin(δ[k]),
где k - текущий номер периода квантования;
Rг - заданное значение амплитуды тестовой гармоники;
δ[k] - дискретное время генератора пробных колебаний, зависящее от текущей величины нормируемого периода колебаний Nj и определяющееся соотношением: δ[k]=δ[k]+2π/Nj, при этом, если δ[k]≥2π, то δ[k]=δ[k]-2π.
Nj - нормированный период, который связан с частотой пробных колебаний соотношением:
ω=2π/(NjTq),
где Tq - период квантования.
Измерители амплитуды и фазы представляют собой дискретные фильтры Фурье, которые по m-периодов пробных колебаний определяют на j-м цикле адаптации оценки амплитуды R(j) и фазы ϕ(j) гармонической составляющей в сигнале S[k] согласно формулам:
где Rs(j), Rc(j) - синусная и косинусная составляющие сигнала Y[k];
m - число анализируемых периодов колебаний, варьируя которое можно достичь повышения помехоустойчивости контура адаптации в зависимости от «зашумленности» Y[k].
В качестве анализируемого сигнала S[k] для первого фильтра Фурье (блок 4) выступает выходной сигнал выхода объекта управления Y[k] (S[k]=Y[k]). При работе адаптивной системы управления в реальном времени текущие значения сигнала с выхода объекта управления Y[k] получают путем аналого-цифрового преобразования. Для второго фильтра Фурье (блок 8) анализируемым сигналом является вход объекта управления U[k] (S[k]=U[k]). Для третьего фильтра Фурье (блок 10) - Up[k] (S[k]=Up[k]).
Длительность анализируемой на j-м цикле последовательности, в течение которой не меняется частота генератора, равна mNjTq.
Блок 5 фазовой подстройки работает, в простейшем случае, по интегральному закону управления, так как скачки по пробной частоте нежелательны. Он, путем изменения частоты колебаний ω генератора, отслеживает фазовый сдвиг между гармоникой пробной частоты на входе объекта управления и гармоникой той же частоты на выходе регулятора на уровне ϕз=-2,62 рад. Блок фазовой подстройки частоты реализует следующую функцию:
Nj+1=Nj{βϕ(j)/ϕз-(β-1)},
где β выбирается в диапазоне 0,5÷1,5, обеспечивающем устойчивую работу контура адаптации для объектов с различными величинами запаздывания.
Регулятор 1 реализует алгоритм цифрового скоростного ПИД-регулятора с фильтрацией Д составляющей. Он получается путем дискретизации соответствующего непрерывного ПИД-регулятора, и закон управления выглядит следующим образом:
где kp - коэффициент передачи регулятора, Ти - постоянная времени изодрома регулятора, Т∂ - постоянная времени дифференцирования регулятора.
На вход объекта управления 3 подается сумма сигналов с выхода регулятора Up(t) и пробное гармоническое воздействие Uг(t) с генератора пробных гармонических колебаний, частота которого может изменяться.
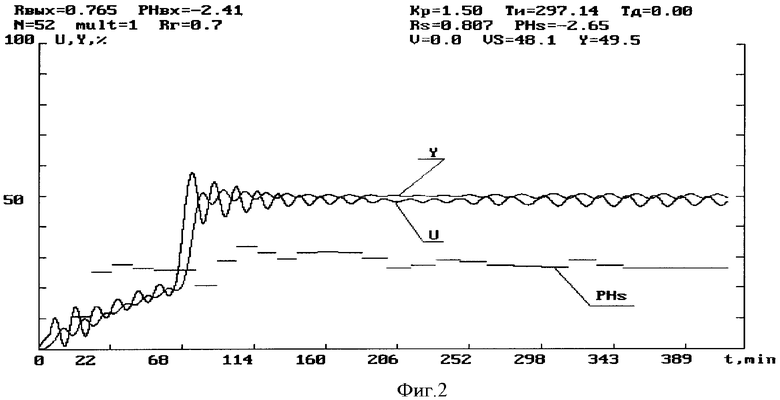
Работа адаптивной системы управления исследовалась на компьютерной модели. На Фиг.2 приведен график самонастройки адаптивного ПИ-регулятора (при отключенной Д-составляющей, Тд=0) со стабилизацией вектора АФХ разомкнутой системы при управлении объектом. На графике: N - нормированный период пробных колебаний; Rг - амплитуда пробного сигнала; Kp, Ти, Тд - настройки ПИД-регулятора; k - коэффициент передачи объекта управления; Т1 - первая постоянная времени объекта; Rвых - амплитуда колебаний на выходе объекта; Ph - фаза вектора АФХ объекта.
Были установлены следующие начальные параметры ПИ-регулятора: kp=0.8, Ти=3200с. Эти параметры далеки от своих оптимальных значений, определенных в результате самонастройки и представленных в правом верхнем углу графика: kp=1.5, Tи=297.14 c. На графике представлены также: Rs и PHs - соответственно амплитуда и фаза вектора АФХ разомкнутой системы управления на частоте пробных колебаний. Период квантования в системе Tq=20 c.
На Фиг.3 показан график отработки адаптивным регулятором задания. При этом контур самонастройки продолжал работу, что является неотъемлемым условием при управлении объектами с переменными параметрами.
График выявляет особенности работы адаптивного регулятора со стабилизацией вектора АФХ разомкнутой системы: при больших скачках задающего воздействия происходит также бросок оценок вектора АФХ, после чего для восстановления истинных значений амплитуды и фаза требуется несколько периодов пробных колебаний. Это связано с тем, что при подобном построении алгоритма адаптации частота пробных колебаний близка к частоте резонанса системы, с которой и протекают переходные процессы в системе. Данный факт несколько снижает быстродействие контура самонастройки, однако в целом графики показывают качественную динамику основного контура системы управления.
Представленные графики подтверждают работоспособность адаптивной системы управления при управлении объектами с переменными параметрами, даже в условиях наиболее сложных параметрических возмущений в виде скачков.
Таким образом, предлагаемая адаптивная система управления обеспечивает непрерывный контроль заданных запасов устойчивости в системе при оптимальных настройках ПИД-регулятора при одновременном осуществлении безыдентификационного подхода построения адаптивной системы управления, т.е. при функционировании системы нигде в явном виде не используется математическая модель объекта управления. В предлагаемой адаптивной системе управления из контура исключен заграждающий фильтр и связанные с его наличием негативные эффекты процесса самонастройки, а сама адаптивная система управления имеет более широкий амплитудный диапазона работы по сравнению с прототипом, что позволяет работать с малой амплитудой на входе объекта управления и, как следствие, расширить область применения адаптивной системы управления.
Литература
1. Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования, М.: Энергия, 1973, 440 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| ДЕМОДУЛЯТОР ДВУХПОЗИЦИОННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2018 |
|
RU2699066C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
| Адаптивная электрогидравлическая следящая система с модулированной осцилляцией | 2016 |
|
RU2627956C1 |
| ЦИФРОВОЙ ДЕТЕКТОР АМПЛИТУД | 2009 |
|
RU2423781C1 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
Изобретение относится к области автоматики и может быть использовано для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами. Техническим результатом является исключение из контура заграждающего фильтра и связанных с его наличием негативных эффектов, расширение амплитудного диапазона работы путем ограничения специального контура стабилизации амплитуды пробной гармоники на выходе объекта управления, позволяющей работать с малой амплитудой на выходе объекта управления, расширение области применения. Адаптивная система управления содержит регулятор, сумматор, объект управления, три измерителя амплитуды и фазы, блок фазовой автоподстройки частоты, генератор, вычислительный блок, вычислитель амплитудно-фазовой характеристики, блок автоподстройки амплитуды. Соединение указанных элементов адаптивной системы осуществлено так, как указано в документах заявки. 2 з.п. ф-лы, 3 ил.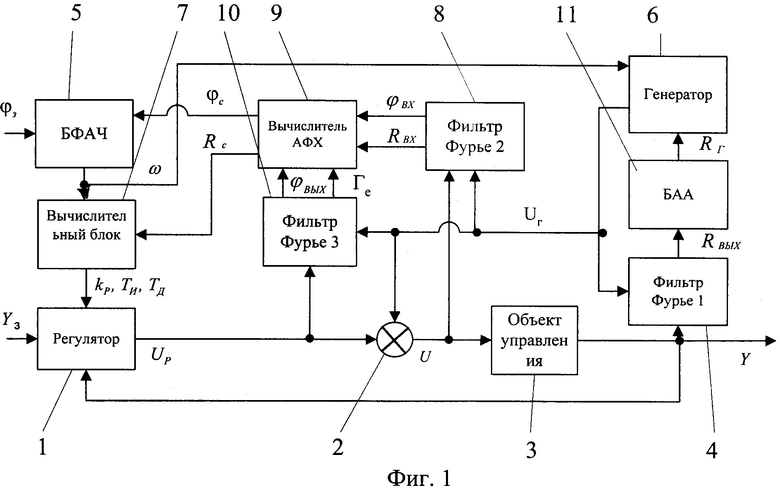
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| Способ бессемерования никелевых штейнов | 1937 |
|
SU59276A1 |
| Адаптивная система управления | 1988 |
|
SU1566319A1 |
| СПОСОБ ГЛУШЕНИЯ СКВАЖИН | 2010 |
|
RU2431736C1 |
| US 4407013 A, 27.09.1983 | |||
| DE 19612884 A, 09.10.1997 | |||
| EP 0974880 B1, 26.01.2000 | |||
| WO 2007024847 A2, 01.03.2007. | |||

