Устройство относится к системам автоматического контроля и регулирования.
Известны датчики перемещений, содержащие катушку вoзбyждeниЯi соединенную с источником питания и расположенную на подвижном объекте, измерительную катушку, расположенную перпендикулярно катушке возбуждения, и блок преобразования на логических элементах «И и «НЕ.
Предлагаемый датчик отличается от известных тем, что в нем установлена дополнительная катушка, подключенная через логический элемент «ПЕ к одному из входов логического элемента «И блока преобразования, причем к другому входу логического элемента «И подключена измерительная катушка, а выход логического элемента «И соединен с выходом датчика.
Это расширит диапазон перемещений и повысит точность работы.
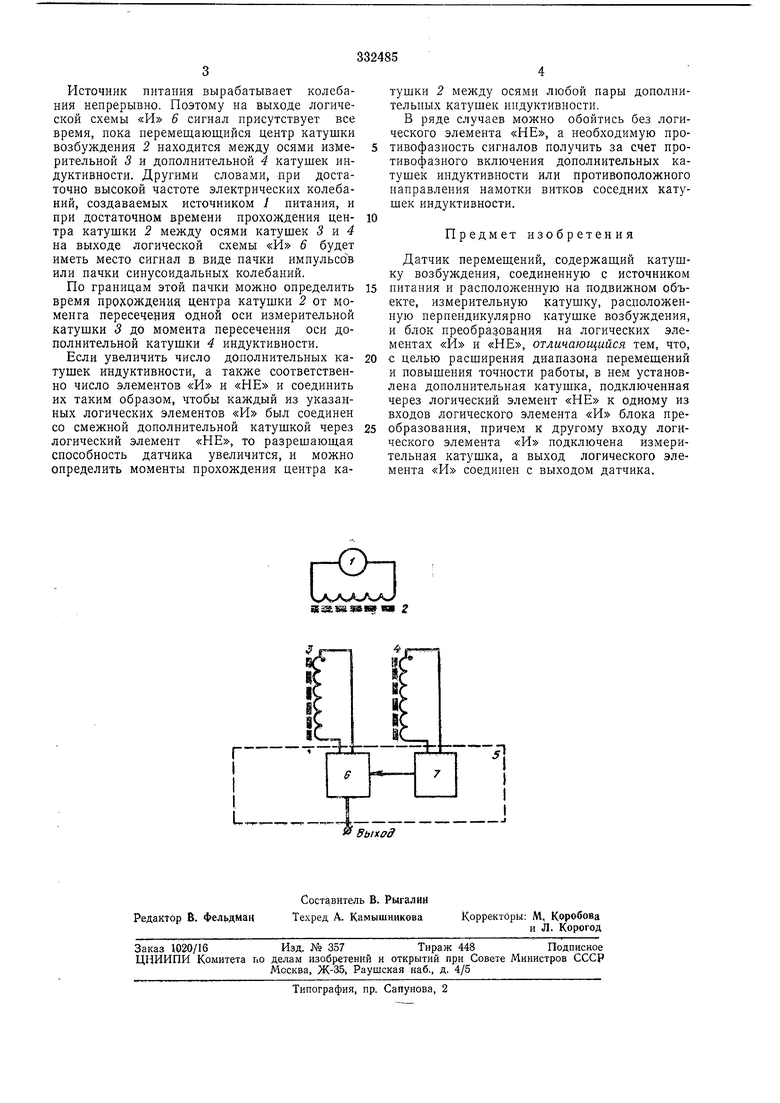
На чертеже приведена функциональная схема устройства.
Описываемое устройство содержит источник / питания, катушку 2 возбуждения, измерительную катушку 3, дополнительную катушку 4 и блок 5 преобразования, который, в свою очередь, содержит логический элемент «И 6 и логический элемент «НЕ 7.
Катушка 2 расположена на подвижном объ екте (на чертеже не показан), измерительная катушка 3 и дополнительная катушка 4 расположены перпендикулярно катушке 2.
На катушку возбуждения 2 подаются электрические колебания от источника / питания и возбуждают ее. При этом вокруг катушки 2 образуется электромагнитное поле, благодаря чему в измерительной 3 и дополнительной 4 катушках индуктивности наводятся электрические колебания. Фаза колебаний, наводимых в измерительной 3 и дополнительной 4 катушках индуктивности, будет одинаковой, если центр катушки 2 находится по одну сторону от осей обеих катушек 3 ъ 4. В случае, когда центр катушки 2 расположен между осями катушек 3 к 4, ъ последних будут наводиться противофазные колебания. Электрические сигналы поступают на один из входов логической схемы «И 6 блока 5 с измерительной катушки 3 непосредственно, а на другой вход - через логическую схему «НЕ 7, которая переворачивает, фазу колебаний на 180°, при этом сигнал на выходе логической схемы «И 6 будет только в том случае, когда центр катушки возбуждения будет находиться между осями измерительной 5 и дополнительной 4 катушек индуктивности.
Источник питания вырабатывает колебания ненрерывно. Поэтому на выходе логической схемы «И 6 сигнал присутствует все время, пока перемещающийся центр катушки возбуждения 2 находится между осями измерительной 3 и дополнительной 4 катушек индуктивности. Другими словами, при достаточно высокой частоте электрических колебаний, создаваемых источником 1 питания, и при достаточном времени прохождения центра катушки 2 между осями катущек 3 и 4 на выходе логической схемы «И 6 будет иметь место сигнал в виде пачки импульсов или пачки синусоидальных колебаний.
По границам этой пачки можно определить время прохождения центра катушки 2 от моменга пересечения одной оси измерительной катущки 3 до момента пересечения оси дополнительной катушки 4 индуктивности.
Если увеличить число дополнительных катущек индуктивности, а также соответственно число элементов «И и «НЕ и соединить их таким образом, чтобы каждый из указанных логических элементов «И был соединен со смежной дополнительной катушкой через логический элемент «НЕ, то разрешающая способность датчика увеличится, и можно определить моменты прохождения центра катушки 2 между осями любой пары дополнительных катущек индуктивности.
В ряде случаев можно обойтись без логического элемента «НЕ, а необходимую противофазность сигналов получить за счет противофазного включения дополнительных катушек индуктивности или противоположного направления намотки витков соседних катушек индуктивности.
Предмет изобретения
Датчик перемещений, содержащий катущку возбуждения, соединенную с источником
питания и расположенную на подвижном объекте, измерительную катущку, расположенную перпендикулярно катущке возбуждения, и блок преобразования на логических элементах «И и «НЕ, отличающийся тем, что,
с целью расширения диапазона перемещений и повыщения точности работы, в нем установлена дополнительная катушка, подключенная через логический элемент «НЕ к одному из входов логического элемента «И блока преобразования, причем к другому входу логического элемента «И подключена измерительная катушка, а выход логического элемента «И соединен с выходом датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВОЗБУЖДЕНИЯ И ПРИЕМА УЛЬТРАЗВУКА | 1972 |
|
SU426716A1 |
| УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ ПРОСТРАНСТВЕННОГОУГЛА | 1971 |
|
SU301728A1 |
| Устройство управления трамбующим узлом | 1980 |
|
SU1013535A1 |
| Бесконтактный датчик положения | 1984 |
|
SU1226013A1 |
| Устройство для автоматического направления электрода по стыку | 1977 |
|
SU742063A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО КОДА В ПАРАЛЛЕЛЬНЫЙ | 1970 |
|
SU273518A1 |
| Устройство для измерения давления | 1977 |
|
SU702246A1 |
| Устройство для считывания графической информации | 1980 |
|
SU955133A1 |
| Индуктивный виброметр с механической системой отсчета амплитуды вибрации | 1960 |
|
SU131905A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU381809A1 |
