Изобретение относится к устройствам управления бесшаботными электромагнитными трамбующими ударными узлами, которые могут найти применением в трамбующих мащинах, используемых в строительстве для уплотнения грунта.
Известно устройство для уплотнения грунта, содержащее катушки прямого и обратного хода ферромагнитного якоря и систему управления 1.
Однако это устройство ненадежно, так как длина хода якоря различна во время работы.
Наиболее близким по технической сущности является устройство управления трамбующим узлом, содержащее катущки прямого и обратного хода, датчик верхнего положения ферромагнитного якоря , и систему питания, причем один вывод катущки обратного хода и выводы катущки прямого хода соединены с соответству19щими выходами системы питания 2.
Недостатком этого устройства является то, что в силу неровности поверхности уплотняемого грунта и колебаний стрелы навески нижняя кромка магнитной части якоря может не доходить до датчика нижнего положения якоря. В этом случае электромагнитные катушки не переключаются, происходит остановка в работе ударного узла.
Цель изобретения - повыщение надежности работы.
Цель достигается тем, что устройство управления трамбующим узлом, содержащем катушки прямого и обратного хода, датчик верхнего положения ферромагнитного якоря и систему питания, причем.один вывод катушки, обратного хода и выводы катушки прямого хода соединены с соответствующими выходами системы питания, снабжено коммутатором, триггером, элементом сравнения с задатчиком и логическим элементом И, причем датчик верхнего положения ферромагнитного якоря подключен к одним из входов коммутатора и триггера, выход которого соединен с одним из входов элемента И, задатчик соединен с одним из входов элемента сравнения, другой вход которого подключен через коммутатор к другому выводу катущки обратного хода, выход элемента сравнения подключен к другому входу элемента И, выход которого соединен с другими входами коммутатора, системы питания и триггера.
На чертеже представлено устройство.
Устройство состоит из электромагнитных катущек обратного 1 и прямого 2 ходов, находящихся в корпусе 3, разделенных полюсами 4-6. В полости катушек под действием их электромагнитных сил перемещается якорь, состоящий из ферромагнитной части 7 и диамагнитного звена 8, соединяющего ферромагнитную часть 7 с трамбующей пятой 9. Верхнее положение якоря определяется индуктивным датчиком верхнего положения якоря 10, по сигналу с которого происходит выключение катушки обратного хода -и включение катущки прямого хода. Датчик выполнен в виде дополни5 тельной обмотки, размещенной на торце верхнего полюса 5. Система управления состоит из тиристорного преобразователя 11, производящего питание и переключение катушек, триггера 12, логического элемента
0 И 13, элемента 14 сравнения электронного коммутатора 15 и задатчика 16.
Работа трамбующего узла происходит следующим образом.
В исходном состоянии (показано на чертеже) электронный коммутатор 15 присое5 диняет катущку обратного хода 1 к тиристорному преобразователю 11. При запитывании катушки обратного хода 1 от преобразователя 11 якорь под действием ее электромагнитных сил движется. В момент подхода к полюсу 5 по сигналу с датчика верхнего положения якоря 10, поступающего на вход тиристорного преобразователя 11, отключается катущка обратного хода 1 и включается катущка прямого хода 2. Сигнал с датчика положения якоря 10 поступает на триггер 12 и электронный коммутатор 15. Триггер 12 переводится в такое состояние, при которОТй сигнал с его выхода поступает на схему элемента И 13 разрешением. Электронный коммутатор 15 отключает катущку обратного хода 1 от тиристорного преобразователя И и присоединяет ее к элементу 14 сравнения. Якорь меняет направление движения и начинает двигаться вниз, соверщая рабочий ход. При этом своим верхним намагниченным концом он наводит ЭДС в отключенной катушке обратного хода. Наводимая ЭДС пропорциональна скорости движения якоря.
ЭДС, наводимая движущимся якорем в катущке обратного хода, подается на схему сравнения. В момент удара по поверхности грунта якорь останавливается и наводимая ЭДС резко уменьщается. При достижении определенного значения ЭДС (которое может задаваться заранее) схемой разности вырабатывается импульс напряжения, который через элемент И 13 посту5 лает на вход тиристорного преобразователя 11 и электронного коммутатора 15. При этом электронный коммутатор 15 присоединяет катущку обратного хода 1 к тиристорному преобразователю 11 и в схеме тиристорного преобразователя производится включение катущки обратного хода и выключение катущки прямого хода 2. Якорь движется вверх, соверщая обратный ход, цикл повторяется. Сигнал с логического эле.мента И 13 поступает на второй вход триггера 12 и переводит его в такое состояние, при котором с его выхода на вход элемента И 13 поступает запретом.
Таким образом, в качестве датчика положения якоря используется уровень на310135354
пряжения, наводимого в отключенной ка-реключения, задается заранее, он может
тушке обратного хода якорем, совершаю-быть задан близким или равным нулю, щим рабочий ход под действием электро-Данное устройство позволит повысить
магнитных сил катушки прямого хода. Уро-надежность работы устройства и произвовень напряжения, определяюш,ий момент пе-дительность уплотнения в 1,5 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| Электромагнитная трамбовка | 1976 |
|
SU629276A1 |
| Устройство для программного управленияпОТОКОМ жидКОСТи | 1978 |
|
SU849013A1 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Способ импульсного регулирования частоты вращения асинхронного электропривода | 1982 |
|
SU1072227A1 |
| Привод инъектора для ангиографии | 1981 |
|
SU992067A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Интегральная схема управления балансовым осциллятором электронно-механических часов | 1985 |
|
SU1290278A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электромагнитный привод возвратно-поступательного движения | 1984 |
|
SU1169130A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ТРАМБУ рЩИМ УЗЛОМ, содержащее катушки прямого и обратного хода, датчик верхнего положения ферромагнитного якоря и систему питания, причем один вывод катушки обратного ходя и выводы катуд1ки прямого хода соединены с coeTBeTCtByroiUHми выходами системы литания, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено коммутатором, триггером, элементом сравнения с задатчиком и логическим элементом JW, причем датчик верхнего положения ферромагнитного якоря подключен к одним из входов коммутаторов и триггера, выход которого соединен с одним из входов элемента И, задатчик соединен с одним из входов элемента сравнения, другой вход которого подключен через коммутатор к другому выводу катушки обратного хода, выход элемента сравнения подключен к другому входу элемента И, выход которого соединен с другими входами коммутатора, системы питания и триггера. W со ел со ел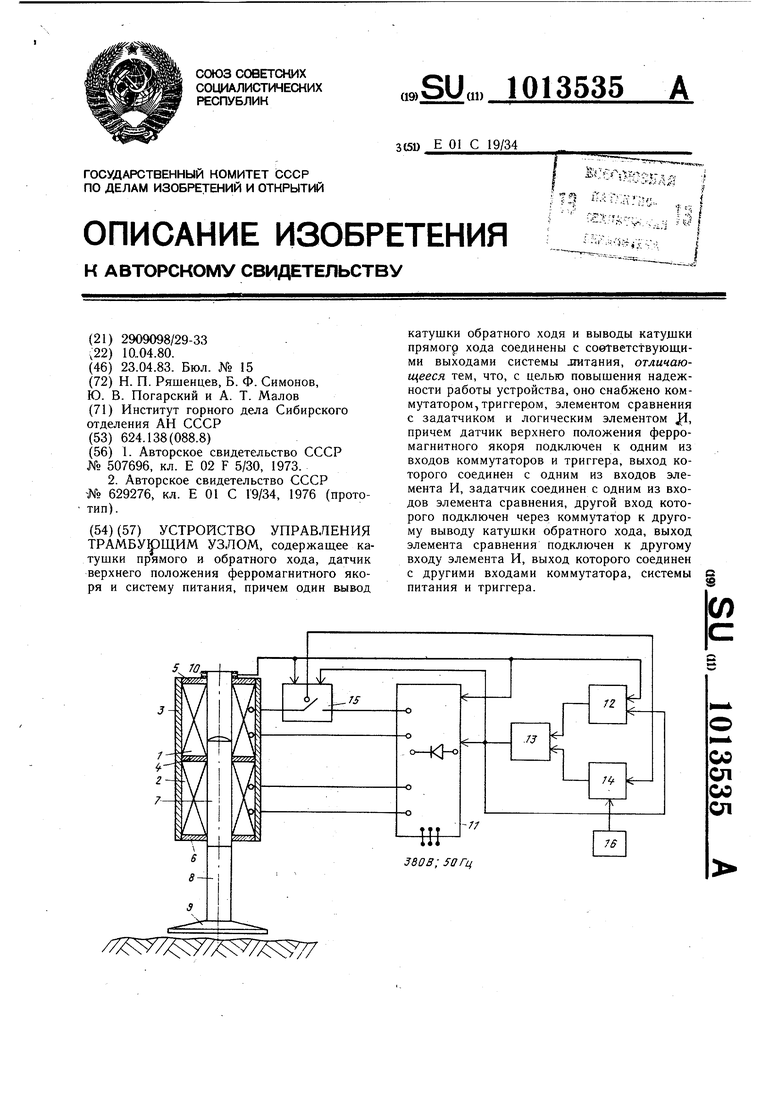
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для уплотнения грунта | 1973 |
|
SU507696A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитная трамбовка | 1976 |
|
SU629276A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
