Изобретение относится к области автоматического управления.
Известны проиорциональные регуляторы Давления преимущественно для систем автоматического унравления, содержащие соосно расположенные подпружиненные следящий плунжер и исполнительный золотник, размещенные в корпусе с каналами командного и редуцированного давлений.
Предлагаемый пролорциональный регулятор давлений отличается от известных тем, что плунжер кинематически связан с золотйиком, а в каналах установлены дроссели.
Такое выполнение пропорционального регулятора давления позволяет обеспечить бесступенчатое регулирование и повысить точность.
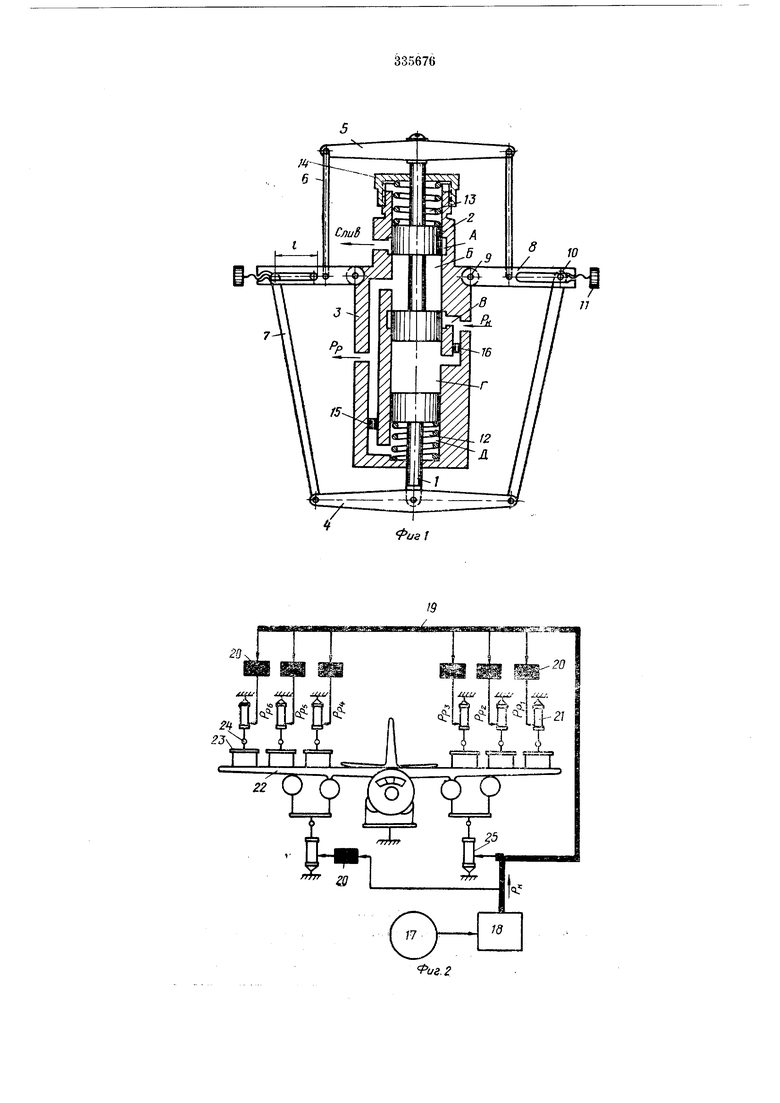
На фиг. 1 дана схема пропорционального регулятора давления; на фиг. 2 - схема включения регулятора.
Пропорциональный регулятор давления состоит из следящего органа - плунжера 1 и исполнительного органа - золотника 2. Следящий плунжер } и исполнительный золотник 2 расположены на одной оси симметрии и заключены в общий кор.пус 3.
Плунжер 1 и золотник 2 связаны между собой жесткой кинематической связью, состоящей из качалки 4, шарнирно закрепленной на плунжере, и неподвижно установленной на
золотнике траверсы 5, связанных между собой тягами б и 7 через коромысло 8. Последнее шарнирно закреплено на опоре 9 корпуса 3. На коромысле 8 выполнены продольные
пазы, в которых перемещаются в пределах хода / шарниры 10 крепления тяги 7 к коромЫслу. Каждый шарнир перемещается с помощью своего винта //, который снабжен установочным лимбом с мерительной шкалой.
Винт 11 позволяет фиксировать левый (или правый) шарнир 10 относительно оси золотника 2. При перемещении шарнира 10 изменяется ллечо действия силы от плуижера / и этим задается новое соотношение усилий между следящим плунжером 1 и исполнительным золотником 2 и, следовательно, новый коэффициент редукции.
Для фиксации плунжера / и золотника 2 в начальном положении при отсутствии давления в корпусе 3 имеются пружины 12 и 13. С помощью регулировочной гайки 14 устанавливается начальное положение золотника 2 и начальное натяжение пружин. Натяжеиие пружин определяет усилие, необходимое для
страгивания золотника. В корпусе 3 выполнены полость слива А, полость редуцированного давления Б, полость командного давления В, лолость управления Г, полость обратной связи д.
также В 11 Г установлены регулируемые дроссели /5 и 16.
Возможная схема включения регулятора давления (см. фиг. 2) состоит из насосной установки 17, автомата .программного нагружения 18, общего коллектора 19, пронорциональных регуляторов давления 20, включенных между коллектором 19 и гидравлическими силовозбудителями 21. Последние передают нагрузку на испытываемую конструкцию 22 через рычажную систему 23. Для контроля нагрузок в цепи нагружения установлены динамометры 24. Силовозбудитель 25 является командным. Давление в него подается непосредственно от автомата программного нагружения 18.
Пропорциональный регулятор давления работает следующим образом.
Сначала исполнительный золотник 2 под действием пружин 12 и 13 находится в нижнем положении, и дросселирующие окна открыты так, что полость В сообщается с полостями и Д. Рабочая жидкость лод давлением РК поступает от коллектора 19 на вход регулятора, в полости S и с. Давление РК воздействует в полости Г на .равные по площади торцы плунжера 1 и золотника 2. При этом плунжер 1 стремится переместиться внпз, а золотник 2 - вверх.
Их со.вместное движение определяет усилие, которое, действуя на большем плече коромысла 8, заставляет плунжер и золотник двигаться вниз. Одновременно возрастает редуцированное давление Рр в полостях Б и Д.
Давление в полости Д стремится переместить плунжер 1 вверх, уменьшая действие давления на плунжер в полости Г. Наступает момент, когда силы, действующие вверх, заставляют плунжер / и золотник 2 смещаться вверх. При этом прерывается сообщение между полостями Б и S. Если равновесие сил не наступило и давление Рр велико, то плунжер и золотник продолжают движение вверх до тех пор, -пока полость Б не соединится с полостью сл.ива А. При этом давление Рр уменьшится и золотник вернется в нейтральное равновесное положение.
Работа регулятора давления обеспечивает выдерживание заданного, постоянного для
данного режима соотношения между давлением на входе РК и давлением на выходе Рр, которые связаны между собой зависимостью
Pp Pconst+ редРк;
где /Сред - коэффициент редукции, зависящий от соотношения плеч на коромысле 8;
Pconst - постоянное добавочное давление, которое зависит от натяжения пружин 12 и 13.
Предлагаемый регулятор давления предназначен и для синхронизации работы нескольких гидравлических силовозбудителей с равными рабочими давлениями в них. При этом система работает следующим образом.
Рабочая жидкость поступает из насосной установки 17 в автомат программного нагружения 18, который задает давление жидкости в коллекторе 19 и осуществляет программное управление изменением давления и усилия в командном силовозбудителе 25. Давление РК из коллектора 19 передается на вход пропорциональных регуляторов давления 20, на выходе которых создаются различные давления Яр, , . . . Рр в зависимости от установленных коэффициентов редукции. Таким образом, создавая во входном коллекторе 19 нужное давление РК, получают необходимое давление в каждом гидравлическом силовозбудителе 21. Причем, кагрулсение всех точек конструкции происходит в одно и то же время, так как давление в гидравлических -силовозбудителях является функцией давления в коллекторе.
Предмет изобретения
Пропорциональный регулятор давления преимущественно для систем автоматического управления, содержащий соосно расположенные подпружиненные следящий плунжер и исполнительный золотник, размещенные в корпусе с каналами командного и редуцированного давлений, отличающийся тем, что, с целью обеспечения бесступенчатого регулирования и повышения точности, плунжер кипематически связан с золотником, а в каналах установлены дроссели.