Изобретение относится к пневматическому тра-нспорту.
Из)Вест«ы установки для пневматического траиопортирования грузов в контейнерах по трубопроводам, содержащие магистральный трубопровод с перемещаемыми внутри иего контейнерами и приемную станцию. Однако в этих установках сохранение безостановочной ритмичлой работы зависит от безотказной работы приемкой станции, которая должна быть в высокой степени надеж-на, механизир01вана и автоматизирована. Сбой в работе приемной станции, .нанример неготовность ее к своевременному приему следующего контейнера или состава контейнеров, в известных установках сопровождается автоматической остановкой всей установки, так как в противном случае возможны удары подходящего контейнера или состава контейнеров в закрытую задвижку приемной станции. Пуск таких установок после аварийной остановки, особенно при большой длине магистрального трубопровода, когда в трубопроводе остается MHOiro .контейнеров или сО|Ставов контейнеров, затруднителен и требует большого резерва давления сжато:го воз:духа и мощности компрессоров. Вывод установки на установнвтиися режим при пуске занимает много времени.
Лежности и бесперебойности работы устаноВ КИ:, обеспечение возможности задержки и временного накопления контейнеров или составов контейнеров в критических точках трассы, например перед приемной станцией ,и перед крутыми наклонными участками трассЫ трубопровода.
Это достигается тем, что к магистральному трубопроводу перед критическими точками
его трассы йрисоедннены обводные трубопроводы, снабженные заслонками с приводами. Для автоматического раздельного выпуска составов контейнеров из участков магистрального трубопровода, заключенных между концами обводных трубопроводов, на MaraicTральиом трубопроводе 1после каждого обво.дного трубопровода установлен датчик, связанный через логическую схему и блок управления с приводом заслонки обводного трубопровода.
Для обеспечения безопасной дистанции между контейнерами или составами контейнеров и регулирования их скорости, на магистральном трубопроводе на заданном расстоянии один от другого попарно установлены датчики, связанные между собой через блок контроля скорости состава контейнеров по времени прохождения между двумя датчиками и |блок логических элементо-в, обрас блоком управления приводо м заслонок обводнОГО трубопровода.
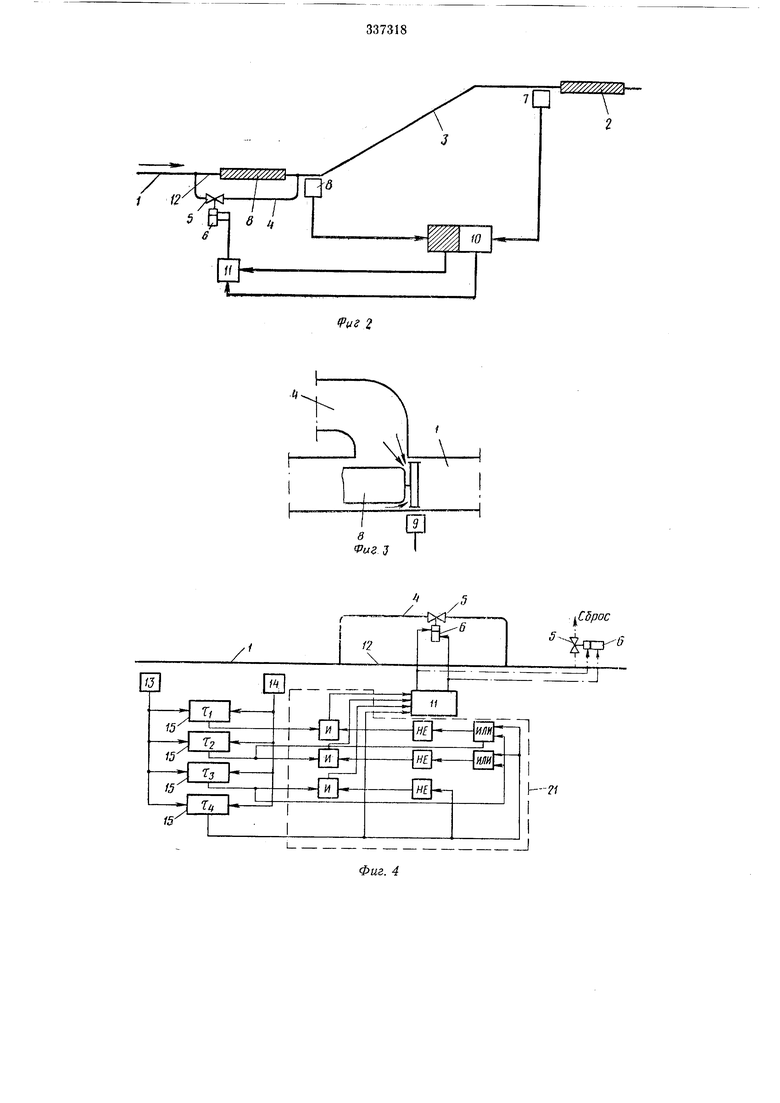
На фиг. 1 изображена описываемая установка ,с обводным трубОПроводО)М неред приемной станцией; ,на фиг. 2 - то же, перед участком крутого подъема трассы трубопровода; на фи,г. 3 -- датчик, размеп енный после об1В:ОДно1Го трубопровода; на фап-. 4 - схема регулирования скорости движения контейнеров; на фиГ. 5 - схема блока контроля скорости.
Установка содержит .магистральный трубопровод / и приемную станцию 2. Перед критическими точками трассы трубоир01вода, например перед приемной- станцией 2 или перед участкам 3 крутого еодъема его трассы, к ма-гистральному труболроводу орисоединены 0 б:водные трубопроводы 4, снабженные задвиж1ками 5 с привода|Ми 6. На магистральИ01М трубопроводе /. зстанавдены датчики 7, ситнализирующие о готовности приемной станции 2 к приему очередно1го состава контейнеров 8 или о готовности участка 3 крутого подъема трассы, а также датчики 9, расположенные непосредственно после каждого обводного трубопровода 4. Датчики 7 и 5 связаны через логическую схему, представляющую собой триггер 10, и через блок 11 управления с приводом 6 заслонки 5. Количество обводных трубопроводов 4 зависит от длины магистрального трубопровода /, длины и скорости движения составов конт,ейнеров, Ч1исла крутых наклонных участков трассы трубопровода / и его участков, на которых HeoiBходимо регулирование скорости движения составов контейнеров, а также от других факторов. Диаметр обводного трубопровода 4 и длина участка 12 магистрального трубопровода, заключенного между концами обводного трубопровода, должны быть достаточными для ПОЛНОЙ остановки состава контейнеров на участке 12 трубопровода и для возможности накопления на этом участке необходимого количества составов контейнеров.
При закрытой заслонке 5 составы контейнеров 8 беспрепят ственно проходят по участку 12 трубопровода. Обводной трубопровод 9 ие оказывает на их движение никакого влияния. Частичное открытие заслонки 5 приводит к снижению расхода воздуха, поступающего в участок 12 вместе с составом контейнеров, вследствие чего скорость последнего снижается. Величина скорости движения состава контейнеров к моменту выхода его из участка 12 зависит от степени открытия заслонки 5. Во время работы установки перед приемной станцией или, участком крутого подъема трассы нормальное положение заслонки 5 принято открытым. До поступле,нпя с датчика 7 сигнала о готовности приемной станции 2 к приему очередиого состава контейнеров или участ1ка 3 крутого подъема к выходу очередного состава на подъем (система должна обеспечивать движение на участке крутого подъема только одного состава)
вследствие открытого положения заслонки 5 к участку 12 трубопровода могут подойти один или несколько составов, которые могут быть задержаны в нем.
5 В момент готовности приемной станции, 2 к приему очередного состава контейнеров или готовности участка 3 крутого подъема трассы к выходу на подъем очередного состава, т. е., когда находившийся па участке один со10 став преодолел подъем, вышел на; горизонтальный участок и прошел мимо датчика 7, последний подает си.пнал и а правый вход триггера 10 и ставит последний в иоложание, при котором на блок // подается команда за15 крытия заслонки 5 на. обводном трубопроводе 4. Закрытие заслонки обеспечивает выход очередиого состава из участка 12 трубопровода для приема в станцию 2 или на подъе1м. Как только головная часть состава контейне20 poiB ока1жется против датчика 9, последний перебрасывает триггер 10 в состояние, ори котором заслонка 5 открьивается, и находящиеся в участке 12 трубопровода остальны е составы контейнеров задерживаются в нем. 5 Таки.м образом, осуществляется раздельный выпуск составов из участка 12 трубопровода по мере готовности приемной станци-и / или участка 3 крутого подъема трассы. При необход1имости регулирован-ия скорости 0 движения состава 5, например до поступления его в приемную станцию, перед поворотом или перед началом движения по крутому спуску трассы предусмотрены датчики 13 и 14 прохождения составов, которые расположе5 ны на заданном расстоянаш один от другого и обеспечивают измерение скорости движения составов по времени прохождения их между этими датчиками. Сигналы с датчиком поступают в блоки 15 контроля скорости. 0 Количество блоков 15 в системе соответствует количеству установленных опорных значений скорости. Сигнал с датчика 13 при прохождеш-ш состава опрокидывает триггер 16. При этом с тр.иггера поступает потенциальный 5 сигнал на схему 17 «НЕ и одновременно, на дифференцирующую цепь 18, запуская передним фронтом ждущий Мультивибратор 19. При прохождении соста1вом датчика 14 триггер 16 возвращается в первоначальное состоя0 нме.
Таким образом, потенц.нальный сигнал с триггера 16 ио своей длительности равен времени прохождения заданного расстояния .между датчиками 13 в 14, которое обратно про5 порциоиально скорости движения состава. Длительность импульса т ждущего мультивибратора 19 соответствует некоторой опорной скорости, причем .| и т. д. Сигналы со ждущего мультивибратора /9 и с 0 триггера 16 через схему 17 «НЕ подаются на схему 20 «И совпадения, на выходе которой выделяется потенциальный Т;игнал, длительность которого равна разности сигналов по времени. На выходе схемы «И появляется раз гостиый сигнал только в том случае,
когда длительность нмпульса со ждущего мультивибратора 19 больше времени прохождения состава кантейнеров между датчикаМИ 13 и 14, т. е. когда скорость движения состава контейнеров выше опорной для данного блока -контроля скорости. В общем случае этому у1словию отвечает «есколыко блоKOiB /5 контроля скорости, и силналы с них поступают в блок логгьческих элементов мульти.виратора 19 больше времени прохождения состава контейнеров между датчика1ми 13 и 14, т. е., когда скорость состава контейнера выше опорной для данной блока контроля скорости.
В общем случае этому условию отвечает несколько бло1К01В 15 ко троля с-корости, и сигналы с них поступают в блок логических элементов 21. Последний выбирает свпнал с блока 15, имеющего наибольшее значение опорной скорости, и передает его блоку 11 управления. Блок 11 обеспечивает открытие заслонки 5 на обводном трубопроводе 4 или на сбросной линии магистрального трубопровода на угол, соответствующий сигналу с выбранного логической схемой блока 15. В результате этого скорость движе:ния состава контейнеров по выходе из участка 12 трубопровода или сбросной линни приближается к заданнО|Му значению.
Предмет изобретения
1. Установка для пиевматического транспортирования грузов в контейнерах по трубопроводам, содержашая магистральный трубопровод с перемещаемыми внутри него контеинерами и приемную сганцию, отличающаяся теМ, что, с целью повышения надежности и бесперебойности работы установки, обеспечения В031МОЖНОСТИ задержки и временного накопления контейнеров или составов контейнеров в критических точках трассы трубопровода, напри-мер перед приемной станцией и перед крутымп наклонными участками трассы, к магистральному трубопроводу перед критическими точками его трассы присоединены обводиые трубопроводы, снабженные заслонкам-и с привода-ми.
2.Установка по п. 1, отличающаяся тем, что, с целью автоматиче-ского раздельного вьт-пуска составов контейнеров из уча1стков магистрального трубопровода, заключенных между концами обводных трубопроводо-в, на магистральном трубопроводе после каждого об)водного трубопрОВода установлен датчик, связанный через логическую схему и -блок управления с приводом заслонки обводного трубопровода.
3.Установка по п. 1, отличающаяся тем, что, с целью обеспечения безопасной дистанции между контейнера-ми или состава-ми ко-нтейнеров и регулирования их скорости, на магистральном трубопроводе на заданном расстОЯни-и один от другого попарно установлены датчики, связанные через блок контроля скорости состава контейнеров по времени прохождения между двумя датчиками и блок логических элементов, обрабатывающий результаты измерения скорости, с блоком управления приводо1м заслонок обводного трубопровода. к ....



Ti
.
8 fPM2 J
.5
ifdpoc ,
S -В-гТ
Т-
.5j
PitZ 5
