(54) УСТАНОВКЛ ДЛЯ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВЛНИЯ ГРУЗОВ В КОНТЕЙНЕРАХ ИЛИ КОНТЕЙНЕРНЫХ СОСТАВАХ
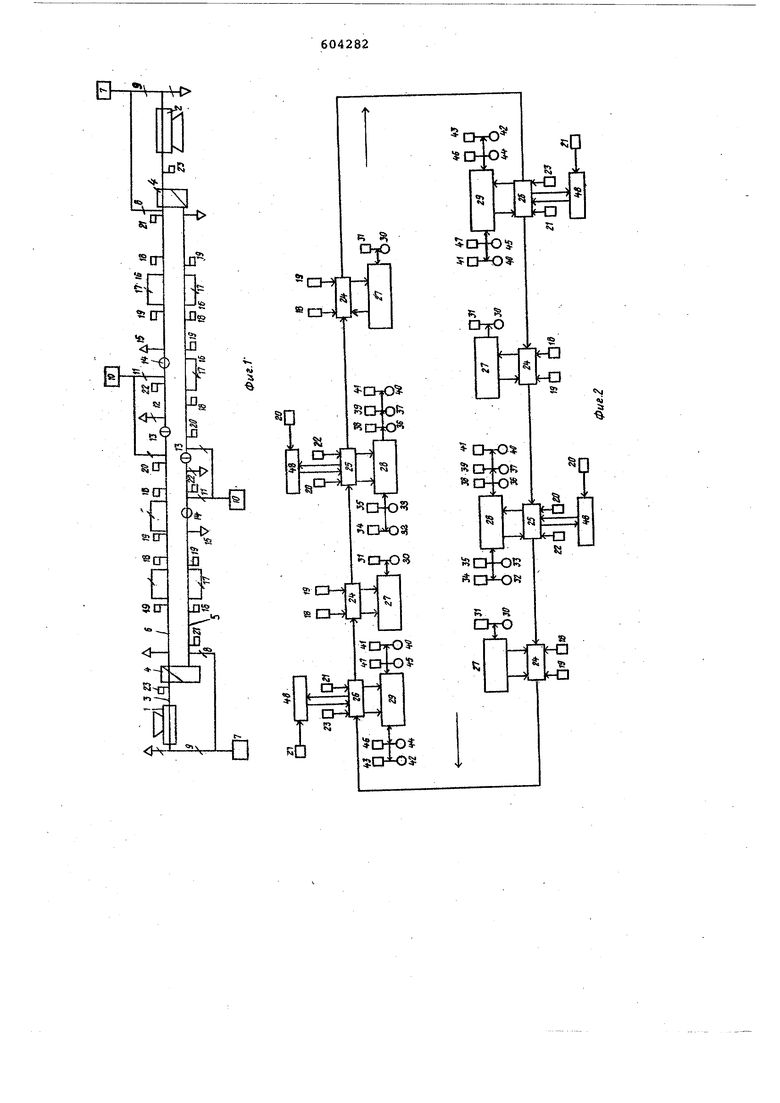
Установка содержит оконечные .стании 1 и 2, которые через отрезки 3 стрелочные переводы 4 соединены двуя магистральными трубопроводами .5 и . Вблизи станций 1 и 2 расположены оловные воздуходувные станции 7, оторые подключены к трубопроводам и 6 через клапан 8, а к станциям 1 и 2 - черезклапаны 9. Установка одержит также промежуточные воздуодувные станции 10. В расчетных с клапанами 11 местах установок этих станций в трубопроводы 5 и 6 встраивают шлюзовые устройства, состоящие из отрезка 12 трубы, длина которой определяется длиной состава и участком его торможения в шлюзовом устройстве, и шлюзовых затворов 13 и 14, позволяющих в открытом положении свободно проходить составам. Транспортные трубопроводы сообщаются с ат1«)сферой патрубками 15. Промежутки между соседними воздуходувными станциями (например, и 10) делятся на контрольные участки байпасными устройствами так, что на каждом из контрольных участков может одновременно находиться не более одного контейнерного состава.
Байпасные устройства выполнены из отрезка 16 обводной трубы, подключаемой параллельно к транспортному трубопроводу, с установленным на нем клапаном 17. На входах и выходах байпасных участков установлены датчики 18 и 19 положения (прохождения) составов, на выходе из шлюзовых устройств - датчики 20 положения составов, а на выходе из стрелочных переводов - датчики 21 положения составов. Внутри шлюзового устройства на расстоянии длнны состава от первого по ходу движения шлюзового затвора 14 установлен датчик 22 положения состава, а на расстоянии длины состава от стрелочных переводов 4 установлены датчики 23 положения состава.
выходы датчиков 18-23 соединены соответственно с входами местных блоков 24-26 управления (см. фиг. 2), соединенных своими выходами с входами соответствующих местных исполнительных устройств 27-29.
Исполнительное устройство 27 связано с приводом 30 клапана 17 байпасного устройства с датчиком 31 положения.
Исполнительное устройство 28 связано с приводами 32 и 33 с датчиками 34 и 35 положения, привода1«1 36 и 37 шлюзовых затворов с датчиками 38 и 39 положения и с приводом 40 клапанов воздушных патрубков, врезанных в конце погрузочной и разгрузочной станции и вблизи шлюзового затвора,с датчиком 41 положения.
Исполнительное устройство 29 связано с приводом 42 стрелки со своим датчиком 43 положения, с приводами
44 и 45 клапанов 8 и 9 со своими датчиками 46 и 47 положения и приводом ; 40 с датчиком 41 положения.
На оконечных и промежуточных- станциях (см. поз. 1,2,10 на фиг. 1) установлены, кроме того, блоки 48 контроля и коррекции временных интервалов движения между составами, которые связаны с датчиками 21 или 20 г оложения составов и местны.ми блоками 25 и 26 управления.
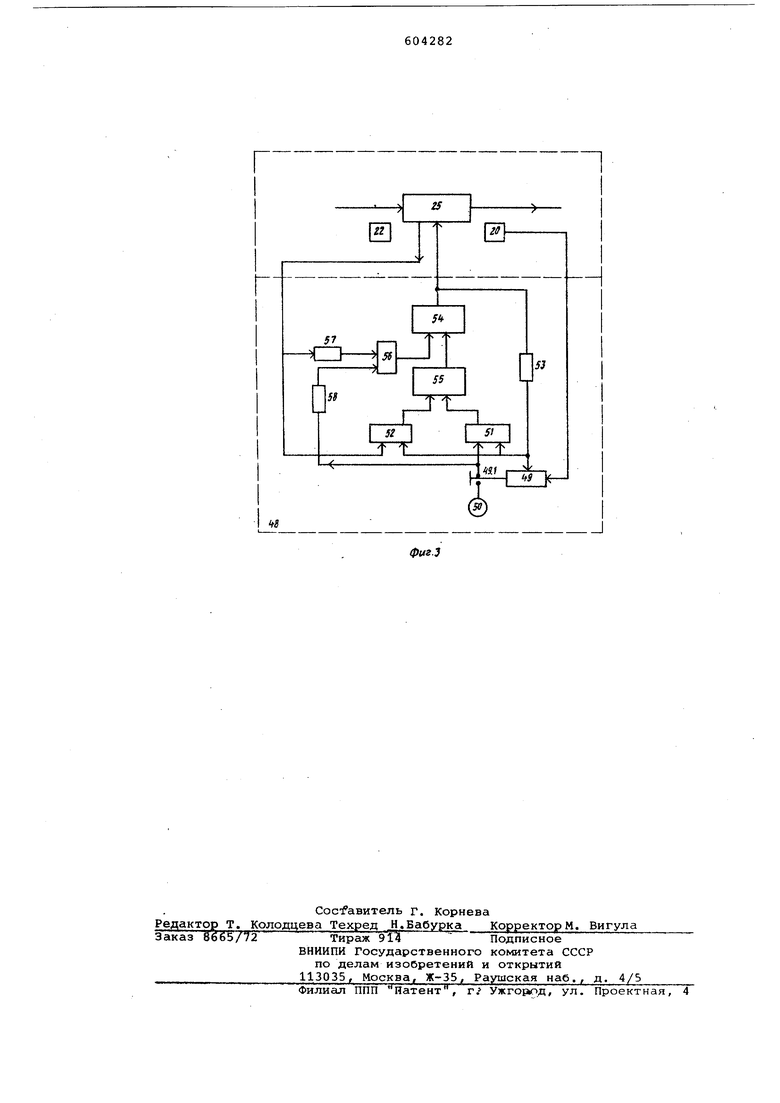
Блок 48 (см.фиг. 3) состоит из реле 49 времени, подключенного к выходу датчика, например, 20, положения состд ов, генератора 50 одиночных импульсов, подключенного через
$ разомкнутый контакт 49.1 реле 49 к одному из входов триггера 51, другой вход которого связан с одним из входов второго триггера 52 и через элемент задержки S3 - с выходом логического элемента И 54, являющимся выходом блока 48.
Входы элемента 54 подключены соответственно к выходу другого элемента И 55, подключенного своими входами к выходам обоих триггеров 51 и
52 и к выходу элемента ИЛИ 56, входа
которого через элементы 57 и 58 задержки связаны соответственно с выходом блока 25 (или 26) и с выходом генератора 50, Выходной сигнал с блока 25 (или 26) поступает также на другой вход триггера 52.
Установка работает следующим образом.
5 Включаются исполнительные механиэ1 1 головных и промежуточных воздуходувных станций 7 и 10. При отсутствии составов установка занимает исходное положение, при котором клапаны 17 на байпасных участках закрыты, шлюзовые устройства находятся в положении Прием, т.е. шлюзовой затвор 14 открыт, клапан 11 закрыт, клапан 9 открыт, шлюзовой затвор 13 закрыт, клапан (на чертежах не показан) в обводном трубопроводе за затвором 13 закрыт.
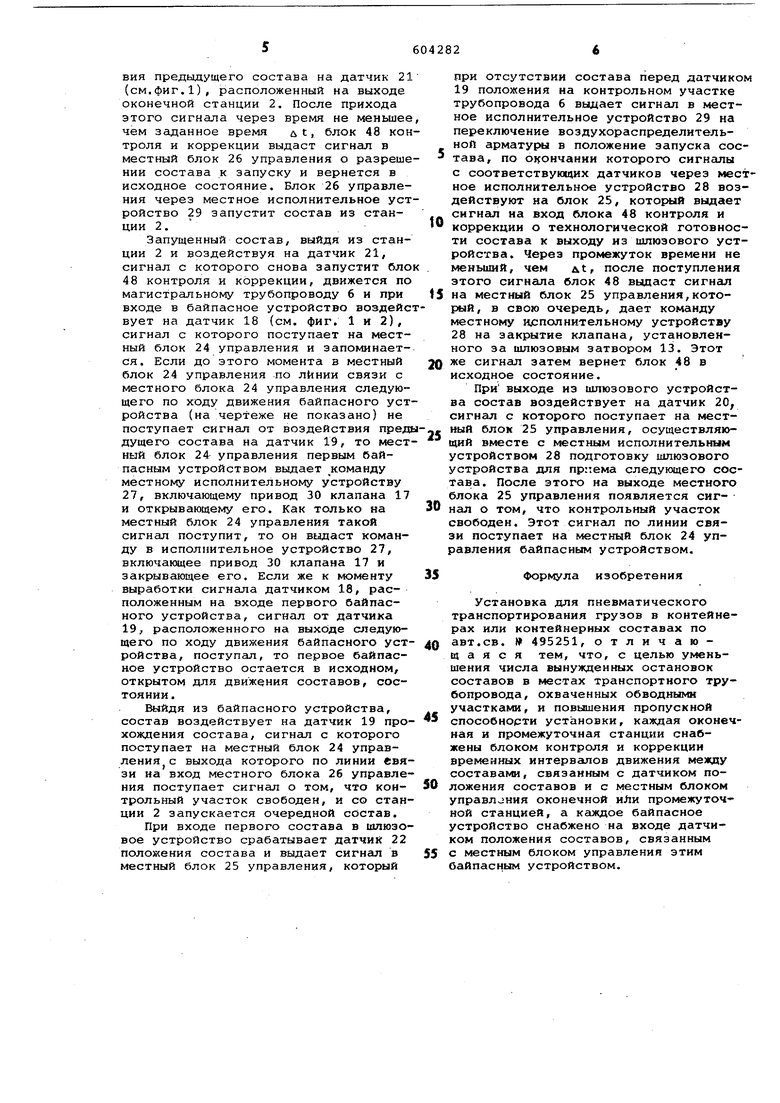
Стрелочные переводы 4 устанавливаются в положение на Прием состава в оконечные (погрузочную и разгрузочную) станции 1 и 2. Состав вводится в станцию 1 специальным устройством (на чертежах не показано). Блок автоматики разгрузочной станJ ции (на чертежах не показан) дает сигнал в местный блок 26 управления о готовности состава к запуску. При получении по линии связи сигнала от местного блока 24 управления байпасным устройством о том,-что контрольный участок свободен, местный блок 26 управления вьадает на вход блока 48 контроля и коррекции сигнал о технологической готовности состава к запуску. На другой вход блока 48 поступает сигнал, полученный от воздейстВИЯ предыдущего состава на датчик 21 (см.фиг.1), расположенный на выходе оконечной станции 2. После прихода этого сигнала через время не меньшее чем заданное время ut, блок 48 контроля и коррекции выдаст сигнал в местный блок 26 управления о разрешений состава к запуску и вернется в исходное состояние. Блок 26 управления через местное исполнительное устройство 29 запустит состав из станции 2.
Запущенный состав, выйдя из станции 2 и воздействуя на датчик 21, сигнал с которого снова запустит бло 48 контроля и коррекции, движется по магистральному трубопроводу 6 и при входе в байпасное устройство воздейс вует на датчик 18 (см. фиг. 1 и 2), сигнал с которого поступает на местный блок 24 управления и запоминается. Если до этого момента в местный блок 24 управления по линии связи с местного блока 24 управления следующего по ходу движения байпасного устройства (на чертеже не показано) не поступает сигнал от воздействия предыдущего состава на датчик 19, то местный блок 24 управления первым байпасным устройством выдает команду местному исполнительному устройству 27, включающему привод 30 клапана 17 и открывающему его. Как только на местный блок 24 управления такой сигнал поступит, то он выдаст команду в исполнительное устройство 27, включающее привод 30 клапана 17 и закрывающее его. Если же к моменту выработки сигнала датчиком 18, расположенным на входе первого байпасного устройства, сигнал от датчика 19, расположенного на выхйде следующего по ходу движения байпасного устройства, поступал, то первое байпасное устройство остается в исходном, открытом для движения составов, состоянии.
Выйдя из байпасного устройства, состав воздействует на датчик 19 прохождения состава, сигнал с которого поступает на местный блок 24 управления с выхода которого по линии «вязи на вход местного блока 26 управления поступает сигнал о том, что контрольный участок свободен, и со станции 2 запускается очередной состав.
При входе первого состава в шлюзовое устройство срабатывает датчик 22 положения состава и выдает сигнал в местный блок 25 управления, который
при отсутствии состава перед датчиком 19 положения на контрольном участке трубопровода 6 выдает сигнал в местное исполнительное устройство 29 на переключение воздухораспределительной арматуры в положение запуска состава, по окончании которого сигналы с соответствующих датчиков через местное исполнительное устройство 28 воздействуют на блок 25, который выдает сигнсш на вход блока 48 контроля и
O коррекции о технологической готовности состава к выходу из шлюзового устройства. Через промежуток времени не меньший, чем д1, после поступления этого сигнала блок 48 выдаст сигнал
5 на местный блок 25 управления,который, в свою очередь, дает команду местному HjC полнит ель ному устройству 28 на закрытие клапана, установленного за шлюзовым затвором 13. Этот
0 же сигнал затем вернет блок 48 в исходное состояние.
При выходе из шлюзового устройства состав воздействует на датчик 20, сигнал с которого поступает на мест. ный блок 25 управления, осуществляющий вместе с местным исполнительным устройством 28 подготовку шлюзового устройства для следующего состава. После этого на выходе местного блока 25 управления появляется сиг-
0 нал о том, что контрольный участок свободен. Этот сигнал по линии связи поступает на местный блок 24 управления байпасным устройством.
35
Формула изобретения
Установка для пневматического транспортирования грузов в контейнерах или контейнерных составах по
авт.св. 495251, отличающаяся тем, что, с целью уменьшения числа вынужденных остановок составов в местах транспортного трубопровода, охваченных обводными участками, и повышения пропускной
способнорти установки, каждая оконечная и промежуточная станции снабжены блоком контроля и коррекции временных интервалов движения между составами, связанным с датчиком положения составов и с местным блоком управления оконечной иЛи промежуточной станцией, а каждое байпасное устройство снабжено на входе датчиком положения составов, связанным
с местным блоком управления этим байпасным устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для пневматическогоТРАНСпОРТиРОВАНия гРузОВ ВКОНТЕйНЕРАХ или КОНТЕйНЕРНыХСОСТАВАХ | 1976 |
|
SU806571A2 |
| Установка для пневматического транспортирования грузов в контейнерах или контейнерных составах | 1976 |
|
SU611387A2 |
| Станция контейнеров трубопроводов пневматической установки | 1974 |
|
SU516252A1 |
| Установка для пневматического транспортирования грузов в контейнерах по трубопроводам | 1976 |
|
SU787305A1 |
| Станция остановки контейнеров трубо-пРОВОдНОй пНЕВМОТРАНСпОРТНОй уСТАНОВКи | 1976 |
|
SU593411A1 |
| Установка для пневматического транспортирования контейнеров по трубопроводу | 1989 |
|
SU1726334A1 |
| Устройство для регулирования скорости движения составов контейнеров в трубопроводе пневмотранспортной установки | 1978 |
|
SU988719A1 |
| Всасывающе-нагнетательная установка трубопроводного пневмотранспорта грузов | 1988 |
|
SU1643352A1 |
| Промежуточная воздухонадувная станция контейнерного пневмотранспорта | 1973 |
|
SU477919A1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |