Изобретение относится к области нанесения покрытий в вакууме.
Известен механизм прямолинейного перемещения детали при нанесении покрытий в вакууме, содержащий корпус, внутри которого расположен подвижный стержень на опорах.
Однако такой механизм не обеспечивает перемещения стержня с обрабатываемой деталью.
Цель изобретения - плавность и строгий контроль перемещения стержня с обрабатываемым изделием.
Для этого в предлагаемом механизме опоры выполнены в виде жестко закрепленных в корпусе упругих пружин, связанных между собой посредством стержня, соединенного с источником тока, другой полюс которого соединен с iKOpnycoM.
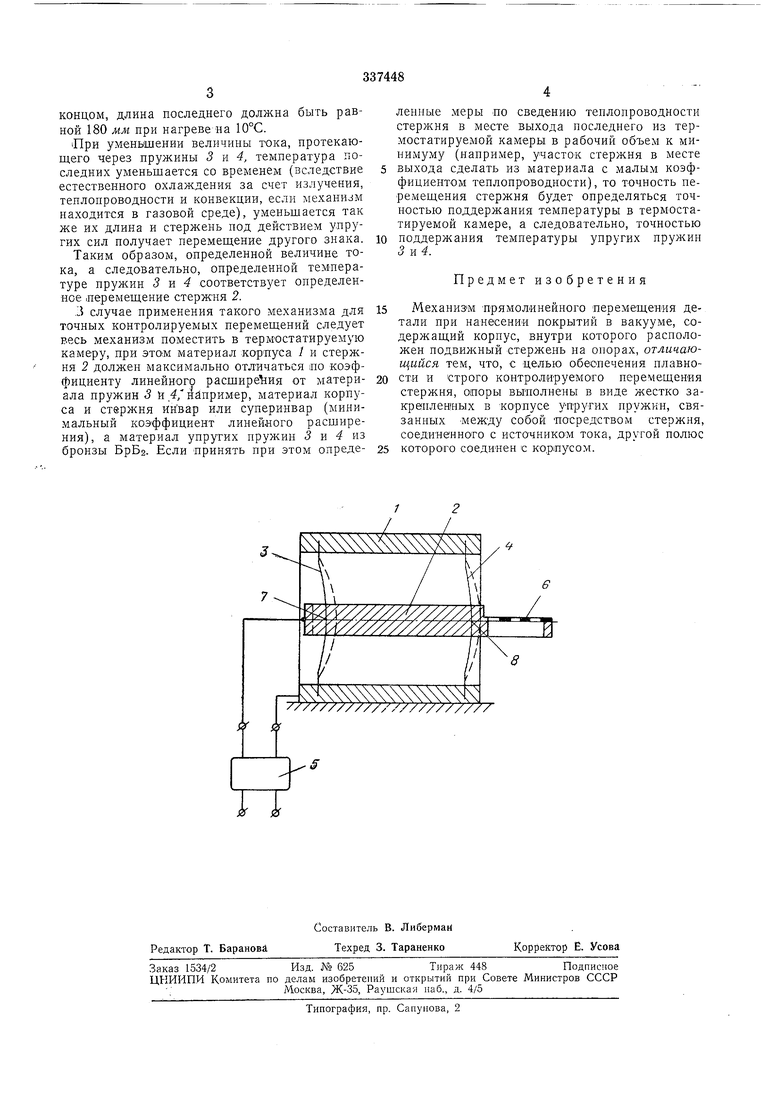
На чертеже показан предлагаемый механизм, общий вид.
Он состоит из корпуса I, внутри которого расположен подвижный стержень 2 на опорах, выполненных в виде жестко закрепленных в корпусе упругих пружин 3 и 4, связанных между собой посредством стержня 2, соединенного с источником 5 тока, другой полюс которого соединен с корпусом 1. На стержне 2 расположена обрабатываемая деталь 6.
ры к стержню) они одновременно нагреваются до заданной программной температуры и претерпевают одинаковое тепловое удлинение. Идентичность удлинения достигается равенством сечений и длин 3 к 4, что, в свою очередь, обеспечивает равенство электрических сопротивлений пружин, поэтому стрела прогиба каждой из опор увеличивается.
Таким образом, каждая из опор работает по схеме множительного механизма, преобразуя малые удлинения в увеличенные поперечные смещения средних точек 7 и 8, соединенных в единое .целое посредством стержня 2. Так как стержень объединяет несколько опор, то движение стержня 2 строго плоско-параллельное при одинаковой длине пружин 3 и 4 н одинаковой температуре последних.
Например при длине опор, равной 60 мм, изготовленных из бронзы Бр Б2, при нагреве их на 10°С удлинение каждой из опор равно ,8-10-б-60-10 10,68-10-3 мм, где: а - коэффициент линейного расширения материала, 1/град, I - длина опоры, мм, Д -изменение температуры опоры, град.
При передаточном отношении каждой из
концом, длина последнего должна быть равной 180 мм при нагреве на 10°С.
При уменьшении величины тока, протекающего через пружины 3 и 4, температура последних уменьшается со временем (вследствие естественного охлаждения за счет излучения, теплопроводности и конвекции, если механизм находится в газовой среде), уменьшается так же их длина и стержень под действием упругих сил получает перемещение другого знака.
Таким образом, определенной величине тока, а следовательно, определенной температуре прулсин 5 и 4 соответствует определенное .перемещение стержня 2.
3 случае применения такого механизма для точных контролируемых перемещений следует весь механизм поместить в термостатируемую камеру, при этом материал корпуса 1 и стержня 2 должен максимально отлИчаться по коэффициенту линейного расщире ия от материала пружин .3 и,4/например, материал корпуса и стержня инвар или суперинвар (минимальный коэффициент линейного расширения), а материал упругих пружин 5 и 4 из бронзы БрБ2. Если принять при этом определенные меры по сведению теплопроводности стержня в месте выхода последнего из термостатируемой камеры в рабочий объем к минимуму (например, участок стержня в месте
выхода сделать из материала с малым коэффициентом теплопроводности), то точность перемещения стержня будет определяться точностью поддержания температуры в термостатируемой камере, а следовательно, точностью
поддержания температуры упругих пружин 5 и-.
Предмет изобретения
Механизм прямолинейного перемещения детали при нанесении покрытий в вакууме, содержащий корпус, внутри которого расположен подвижный стержень на опорах, отличающийся тем, что, с целью обеспечения плавности и строго контролируемого перемещения стержня, опоры выполнены в виде жестко закренленных в корпусе упругих пружин, связанных Между собой посредством стержня, соединенного с источников тока, другой полюс
которого соединен с корлусом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм прямолинейного перемещения детали при нанесении покрытий в вакууме | 1991 |
|
SU1827400A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ВЕРТИКАЛЬНОГО РОТОРА | 2012 |
|
RU2489613C1 |
| Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора или турбины газотурбинного двигателя | 2018 |
|
RU2691000C1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОВЕРХНОСТНОГО НАНОКОМПОЗИЦИОННОГО СЛОЯ НА ДЕТАЛЯХ ИЗ МЕТАЛЛОВ ИЛИ СПЛАВОВ | 2009 |
|
RU2428520C2 |
| ИМИТАТОР ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА ЯДЕРНОГО РЕАКТОРА | 2013 |
|
RU2526856C1 |
| Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора или турбины двухконтурного газотурбинного двигателя | 2018 |
|
RU2684073C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО | 1995 |
|
RU2091881C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРЕЦИЗИОННЫХ БИМЕТАЛЛИЧЕСКИХ ДЛИННОМЕРНЫХ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ТРУБ | 2004 |
|
RU2263013C1 |
| УСТРОЙСТВО ДЛЯ ФРИКЦИОННО-МЕХАНИЧЕСКОГО НАНЕСЕНИЯ АНТИФРИКЦИОННЫХ ПОКРЫТИЙ | 1999 |
|
RU2166562C2 |
R
W////////7 /yy.
