Группа изобретений относится к газотурбинным двигателям и газотурбинным установкам, в том числе к авиационным ТРД и ТРДЦ, а именно к устройствам регулирования радиального зазора между концами рабочих лопаток ступени ротора компрессора или турбины и статора газотурбинного двигателя.
На различных режимах полетного цикла: запуске, прогреве, рулежке, взлете, наборе высоты, крейсерском режиме, снижении, заходе на посадку, полете по глиссаде, реверсу тяги, останове и при переходе с одного режима на другой и даже при постоянном режиме работы при изменении условий полета радиальные зазоры между концами рабочих лопаток ротора и корпусом газотурбинного двигателя изменяются.
Увеличение радиального зазора на 1% (см. Кузнецов Н.Д., Данильченко П.Д., Резник В.Е. Управление радиальными зазорами в турбокомпрессорах авиационных ГТД. - Гос. комитет РСФСР по делам науки и высшей школы. СГАУ. Учебное пособие. Самара, 1991. - 109 с.) снижает КПД КВД и турбины ВД приблизительно на 2% и увеличивает удельный расход топлива до 7%, снижает коэффициент запаса газодинамической устойчивости ΔKy на 3%, а у двигателей с малыми размерами проточной части, например, у двигателя RB 199, у которого высота лопаток на выходе из КВД hл=19 мм, увеличение радиального зазора на 1% приводило к снижению ΔKy на 8%.
Выбор величины радиального монтажного зазора, гарантирующей отсутствие задевания рабочих лопаток ротора о статор на всех режимах работы двигателя, не обеспечивает оптимальные максимальные величины радиальных зазоров на режиме с наибольшей наработкой (крейсерском режиме), при которых удельный расход топлива остается экономически приемлем.
Для обеспечения возможности выбора целесообразных величин радиальных зазоров, поверхности статора, образующие эти зазоры, покрывают слоем истираемого материала, у турбин применяют сотовые уплотнения.
Авиационные двигатели, находящиеся в эксплуатации, после некоторого периода времени часто подвержены образованию больших зазоров, как засчет истирания перьев лопаток, так и засчет износа истираемого слоя.
Кроме того, радиальные зазоры могут изменяться на переходных и стационарных режимах работы двигателя из-за различных в каждый момент времени величин рабочих и тепловых деформаций этих узлов, возникающих из-за разности их упругих свойств и условий нагружения, скоростей нагрева ротора и статора, определяемых различными теплофизическими свойствами их материалов (теплопроводности, теплоемкости), геометрии, габаритных размеров, различных условий конвективного теплопереноса при обтекании этих узлов, различных коэффициентов теплового линейного расширения их материалов.
На фиг. 1, взятой из книги (см. Данильченко В.П., Лукачев С.В., Копылов Ю.Л. [и др.]. Проектирование авиационных газотурбинных двигателей. - Самара, Изд - во СНЦ РАН, 2008. - 619 с.) показан характер изменения тепловых деформаций ступени ротора и статора и изменение радиального зазора в полетном цикле в случае, типичном для ТРД.
На переходных режимах, малом газе, взлетном режиме, крейсерском режиме скорость нагрева тонкостенного статора выше скорости нагрева массивного ротора и тепловая деформация статора на всех этих режимах больше тепловой деформации ротора и радиальный зазор между концами рабочих лопаток ротора и статора на этих режимах увеличивается. На взлетном режиме (см. фиг. 1) и на режиме приемистости при заходе на второй круг из-за увеличения радиальных зазоров по концам лопаток возникает провал тяги двигателя, что приводит к повышению расхода топлива на этих режимах. При переходе от крейсерского режима к малому газу и к останову двигателя скорость охлаждения статора по тем же причинам больше скорости охлаждения ротора и радиальный зазор резко уменьшается и возникает опасность врезания рабочих лопаток в статор двигателя.
Эта опасность еще более усугубляется засчет вытяжки рабочих лопаток и мест их крепления в поле центробежных сил и упругих деформаций ротора и статора под действием динамических и статических нагрузок.
Каждый разработчик авиационных ГТД сталкивается с необходимостью создания у двигателя эффективной системы управления радиальными зазорами, позволяющей избежать аварийных ситуаций в этих опасных случаях.
Системы управления радиальными зазорами в настоящее время условно можно разделить на тепловые и механические. В тепловых системах радиальные зазоры между концами рабочих лопаток ротора и статором регулируются засчет изменения интенсивности нагрева / охлаждения статора или статора и ротора. В механических - смещением деталей статора, ограничивающих этот зазор. Тепловые системы в свою очередь делятся на пассивные и активные. Механические системы выполняются только активными.
Пассивное регулирование осуществляется автоматически без каких-либо сигналов обратной связи и программного управления величинами радиальных зазоров в соответствии с этими сигналами. Активное регулирование также осуществляется автоматически, но по сигналам обратной связи, поступающим от датчиков, например, датчиков, измеряющих зазор, по командам управляющего устройства, например, бортового компьютера.
В современных авиационных газотурбинных двигателях применяется только тепловое регулирование радиальных зазоров между концами рабочих лопаток ротора и статором - пассивное и активное.
Достоинством такого регулирования, определившим его использование в современных ГТД, является простота его осуществления (особенно пассивного), получающаяся прежде всего засчет использования рабочей среды ГТД - сжатого охлаждающего воздуха, регулирование радиальных зазоров сразу у требуемого числа ступеней компрессора, а также использование воздуха, охлаждающего внутренний корпус и на другие цели.
Кроме того, следует отметить, что у авиационных ТРДД при работе двигателя на крейсерском режиме радиальный зазор обычно больше монтажного радиального зазора засчет большей, чем у ротора тепловой деформации корпуса и перепада давления на внутреннем корпусе, и без обдува его охлаждающим воздухом из второго контура может недопустимо снизить КПД компрессора.
К недостаткам теплового регулирования относится недостаточная точность поддержания зазоров, так как их величина имеет сложную нелинейную зависимость от режимов работы двигателя и требуется более гибкое реагирование на температурное состояние двигателя. Кроме того, на переходных режимах температура и расход охлаждающего воздуха может иметь неоднозначный характер, определяемый направлением переходного режима - набор или сбрасывание оборотов двигателя.
Холодный воздух, забираемый из первых ступеней компрессора для охлаждения деталей корпуса с целью регулирования радиальных зазоров, оказывается малоэффективным для близлежащих ступеней. Поэтому холодный воздух первых ступеней рационально может быть использован только для наружного обдува корпусных деталей последних ступеней компрессора при условии их надежной герметизации. Наружный обдув отличается повышенной инерционностью, что ухудшает быстродействие системы поддержания минимальных радиальных зазоров. Нерегулируемый наружный обдув может оказаться неэффективным также и потому, что требует большого количества воздуха, отбираемого из проточной части на охлаждение (1,5-2 и более процентов). Такие затраты воздуха на обдув могут оказаться приемлемыми только в случае если воздух после обдува корпуса повторно используется на другие цели, например, на охлаждение турбины, реактивного сопла и т.д.
Как уже указывалось, разработкой систем теплового активного регулирования радиальных зазоров турбин авиационных ГТД занимаются практически все ведущие авиационные фирмы, разрабатывающие новые конструкции авиационных двигателей. В последнее время в этих разработках новым перспективным направлением в совершенствовании систем теплового активного управления радиальными зазорами являются системы, предложенные в ряде последних опубликованных иностранных и отечественных патентов, в которых с целью расширения диапазона регулирования зазоров, повышения точности и гибкости этого регулирования предложено кольцевой элемент, охватывающий рабочие лопатки ступени турбины с радиальным зазором, не только охлаждать на форсируемых режимах, но и нагревать на дросселируемых режимах полетного цикла специальным нагревателем - резистивным, или индукционным, или СВЧ.
Но в настоящее время, ни одна из известных конструкций турбин с такой системой теплового активного регулирования радиальных зазоров не обеспечивает бесспорного преимущества на всех режимах полетного цикла по сравнению с другими предложенными такими системами. И эти системы, по нашему мнению, нуждаются в дальнейшем усовершенствовании. По-видимому, это пока является одной из причин отсутствия таких систем в конструкциях авиационных ГТД, находящихся в эксплуатации.
Отметим, что системам теплового регулирования радиальных зазоров посвящена весьма обширная научная и патентная литература, обсуждение которой здесь ограничим вышесказанным, так как хотя системы теплового регулирования решают ту же задачу, что и наше предложение, они решают эту задачу другими физическими средствами и способами, и поэтому не являются близкими аналогами нашему предложению.
Основными достоинствами механической системы управления радиальными зазорами являются малая инерционность системы (быстродействие), высокая точность и гибкость системы, широкий диапазон регулирования величины радиального зазора. Эти достоинства обеспечивают менее жесткие требования к согласованию температурных расширений ротора и статора, к разности скоростей нагрева этих узлов. Это в свою очередь позволяет использовать для статора более тонкостенные детали, т.е. уменьшить массу статора, избежать необходимости использования сотовых уплотнений. Другие достоинства этих систем см. ниже. Малая инерционность этих систем особенно ценна для ГТД военных самолетов, совершающих маневры с быстродействующими большими перегрузками. Именно механические системы управления способны успеть адекватно отреагировать на быстрое изменение этих зазоров при маневре самолета.
Недостатком известных механических устройств управления радиальными зазорами является то, что они выполняются отдельно для каждой ступени компрессора и турбины. Хотя известны мероприятия, позволяющие отчасти компенсировать этот недостаток (здесь не рассматриваются).
Кроме того, этот недостаток компенсируется еще и следующими обстоятельствами:
механическое устройство конструктивно совместимо с тепловой системой управления радиальными зазорами, выполненной сразу для всех остальных ступеней компрессора или турбины;
оно вполне конкурентно с тепловым устройством управления радиальными зазорами со специальным нагревателем, которое также выполняется для отдельной ступени;
как уже указывалось, у двигателей с малыми размерами проточной части, например, у двигателя RB 199, у которого высота лопаток на выходе из КВД hл=19 мм, по нашему мнению, требование к точности и гибкости управления радиальными зазорами последней ступени КВД могут оказаться столь высокими, что применение в этом случае механического устройства для регулирования этих зазоров может оказаться наиболее оптимальным вариантом.
К числу недостатков механических систем следует отнести их конструктивную сложность. В патентной литературе описываются только сами устройства механического управления, но кроме самих устройств в систему механического управления входят: привод или привода, датчики, многоканальный прибор для считывания показаний датчиков, компьютер, электрические кабели и другое электрическое оборудование, а само устройство включает такие конструктивные элементы, как связующее кольцо и его шарнирные связи с механизмами позиционирования и приводами. Эти элементы в основном и усложняют систему механического управления.
Кроме того, по нашему мнению, ни одно из известных нам запатентованных механических устройств управления радиальными зазорами (около трех десятков патентов, начиная с 1962 года) не лишено существенных недостатков (см. ниже), препятствующих внедрению этих разработок на двигатели.
Поэтому задача создания высокоэффективной системы управления радиальными зазорами, пригодной для постановки на авиадвигатель, продолжает оставаться актуальной. Более того, по нашему мнению, эти системы могут появиться на современных авиационных ГТД уже в ближайшие годы.
Ставится задача разработки устройств управления радиальными зазорами между концами рабочих лопаток ротора и статором ступени компрессора и турбины ТРД и мощного ТРДД, у которого разница диаметров корпусов второго и первого корпуса существенно больше размера опорной базы стержня механизма позиционирования устройства, потребного для исключения возможности перекоса сегмента устройства, приводящего к аварии двигателя, и заклинивания сегментов и стержней механизма позиционирования, в том числе для КВД, и турбины, у ступеней которой статор не охлаждается сжатым воздухом, подаваемым из-за какой - то ступени компрессора, и СА, расположенные до и за рабочим колесом ступени, не связаны с опорами ротора, а также и для ТВД, ступень которой охлаждается сжатым вторичным воздухом, подаваемым из камеры сгорания, и ТСД, ступень которой охлаждается сжатым воздухом, подаваемым из промежуточной ступени компрессора, опоры которых связаны с опорами ротора, достаточно конструктивно простых, ремонтнопригодных, с возможной быстрой заменой изношенных узлов устройства управления радиальными зазорами, с возможно увеличенным промежутком времени работы двигателя между этими заменами, работоспособного на всех рабочих режимах ТРДД, в том числе и при больших взаимных смещениях его корпусов в направлении продольной оси двигателя, с хорошей массовой характеристикой, высокоэффективных на всех режимах полетного цикла, для своей автоматической работы не требующих создания какой бы то ни было электронной системы управления, в том числе системы управления, включающей выше перечисленные электронные и электрические устройства. Причем конструкция устройств была бы упрощена за счет исключения из их конструкции приводов, связующего кольца и его шарнирных связей.
Так как работа предлагаемого устройства основана на другом физическом принципе, чем у известных устройств теплового или механического управления радиальными зазорами, нам не удалось найти близкие аналоги предлагаемому устройству. Следовательно, предлагаемое устройство можно инденцефицировать как пионерское решение. Однако в РФ статус пионерского изобретения отменен. Поэтому в качестве прототипа выбрано устройство управления, содержащее хотя бы пару основных деталей, выполняющих ту же техническую функцию и конструктивно схожих с парой деталей предлагаемого устройства. В качестве прототипа выбрано механическое устройство управления радиальными зазорами по концам рабочих лопаток ротора (см. Blade tip clearance control apparatus using cam - actuated shroud segment positioning mechanism. Robert J. Corsmeier, Ambrose A. Hauser. General Electric Compani. US Patent 5,049,033. Sep. 17, 1991), содержащее патрубки с фланцем на конце, радиально и равномерно расположенные по окружности, выполненные за одно целое с внешним корпусом компрессора или турбины, втулки, запрессованные в патрубки до упора в их фланец, механизмы позиционирования, поворотные рычаги для приведения в действие этих механизмов, свободно одетые на выступающие концы втулок до упора в их фланцы с возможностью поворота относительно продольной оси механизма позиционирования, поворотное кольцо, шарнирно связанное со всеми поворотными рычагами и приводом, поворачивающим его относительно продольной оси двигателя. Каждый механизм позиционирования состоит из стержня, установленного во втулке с возможностью смещения вдоль продольной оси механизма к продольной оси двигателя и от нее, шайбы, неподвижно закрепленной на конце стержня, опирающейся опорной поверхностью, на ответную поверхность головки рычага, причем эти поверхности выполнены в виде витка спирали, спрофилированной так, что шайба и рычаг образуют кулачковый механизм, где кулачком служит головка рычага, и двух сегментов, образующих кольцо вместе с сегментами других механизмов позиционирования, охватывающее рабочие лопатки ротора с радиальным зазором, и своими концами шарнирно скрепленных со стержнем с помощью осей, выполненных в виде пальцев, неподвижно закрепленных в сегментах и свободно с зазором установленных в отверстиях стержня. Кроме того, каждый механизм позиционирования имеет упругий элемент, выполненный из проволоки, согнутой в виде дуги эллипса, закрепленный на патрубке своими концами, отогнутыми в канавку на фланце патрубка, и зафиксированный с натягом в канавке на торце стержня. Шарнирное соединение поворотного рычага с поворотным кольцом выполнено в виде шарового шарнира, имеющего также возможность смещаться вместе с рычагом относительно кольца вдоль оси, закрепленной в кольце. Такое соединение поворотного рычага с кольцом позволяет при повороте кольца исключить смещение рычага в радиальном направлении, вдоль продольной оси механизма позиционирования, и при этом исключает упругие скручивание и изгиб рычага.
Хотя кинематическая схема этого устройства в принципе вполне работоспособна, само устройство имеет ряд существенных недостатков, скрытых в деталях.
В современных авиационных ГТД для установки надлежащей величины радиального зазора не только на стационарных, но и переходных режимах полетного цикла, необходимо обеспечить смещение механизма позиционирования (сегментов) вдоль его продольной оси у компрессора на 2-4 мм, а у турбины до 5-ти и более мм (см. Данильченко В.П., Лукачев С.В., Копылов Ю.Л. [и др.]. Проектирование авиационных газотурбинных двигателей. - Самара, Изд-во СНЦ РАН, 2008. - 619 с.). Для обеспечения такого смещения стержня механизма позиционирования потребуется радиальный зазор между пальцем и ответным отверстием в стержне 1 мм и более. Следовательно, при колебании сегментов конец сегмента может смещаться к центру ротора на 2 мм и более, что в несколько раз больше оптимального значения радиального зазора по концам рабочих лопаток на любом из режимов полетного цикла и может привести не только к врезанию рабочих лопаток в сегмент, но и поломке лопаток и сегмента.
Хотя этого недостатка достаточно, чтобы отказаться от постановки этого устройства на двигатель, рассмотрим другие, по нашему мнению, существенные недостатки этого устройства, так как они важны для подтверждения актуальности поставленной задачи.
На упругий элемент устройства, установленного на последней ступени КВД современного ГТД действует статическая сила N=F⋅πк+s⋅C+Р, где F - площадь поперечного сечения части стержня, расположенной внутри втулки, πк - давление воздуха в последней ступени компрессора, s - величина смещения стержня, С - жесткость упругого элемента, Р - сила, созданная преднатягом упругого элемента. Нами выполнена оценка поперечного сечения и габаритных размеров упругого элемента с учетом, что у современных авиационных ГТД πк может достигать 5-ти МПа, s=4 мм, F=2,8 см2 (было принято, что диаметр стержня равен 20 мм, что вполне конструктивно) и сила Р немного больше силы F⋅πк. В результате получено, что при обеспечении прочности упругого элемента площадь его поперечного сечения должна быть больше 1 см2. Упругий элемент с таким поперечным сечением нельзя закрепить на патрубке, описанным в патенте способом. Для закрепления упругого элемента на патрубке потребуется специальное крепление, которое займет весьма большой размер под фланцем патрубка в направлении его продольной оси. А это фактически обесценивает другой вариант устройства этого патента с уменьшенным радиальным размером патрубка, так как из-за применения требуемого крепления упругого элемента к патрубку значительно уменьшить этот размер не удастся. Кроме того, по нашим оценкам, габаритный размер такого упругого элемента в направлении, перпендикулярном продольной оси стержня, относительно велик и неконструктивен, и упругий элемент не демпфирует колебания сегмента и вопреки утверждению авторов патента вряд ли способен предотвратить дребезг устройства, а выбор такой конструкции упругого элемента вряд ли можно считать удачным.
Через зазоры в отверстиях, между втулкой и стержнем, будет непроизводительно утекать сжатый воздух из ступени компрессора с этим устройством, что при конструктивном числе механизмов позиционирования (6 и более) даже при малой величине этих зазоров, но большом πк ступени настолько, по-видимому, может снизить КПД компрессора, что его повышение засчет работы устройства управления радиальными зазорами окажется нецелесообразным.
В варианте устройства с низким патрубком на фиг. 10 этого патента этот зазор показан уплотненным прокладкой, но в тексте патента это уплотнение не описано. У современных авиационных ГТД температура воздуха в последней ступени КВД, на которую, по нашему мнению, и целесообразно установить механическое устройство управления радиальными зазорами, достигает 850°К и подвижное уплотнение, надежно и с большим ресурсом работающее в таких тяжелых температурных условиях, должно быть специально разработано, а его описание должно войти в отличительные признаки формулы изобретения.
В тексте патента указано, что предложенное устройство может быть установлено на ступень турбины ГТД. Но в том виде, в каком оно представлено в патенте, оно не может быть установлено в ступени ТВД, у которой статор охлаждается воздухом, отбираемым от последней ступени или промежуточной ступени компрессора (см. ниже), а доработки, которые необходимо произвести в этом устройстве при постановке его на эту турбину и, которые должны быть описаны в отдельном пункте формулы изобретения, в тексте патента отсутствуют.
В тексте патента также указано, что преимуществом предложенного устройства является его простота. С этим трудно согласиться, если мысленно представить дополнения, которые необходимы и существенно усложнят конструкцию устройства, но отсутствуют в предложенном устройстве. Это, прежде всего, привод с передаточным звеном, преобразующим поступательное движение во вращательное, крепление этого звена к поворотному кольцу, элементы корпуса, герметично отделяющие ступень КВД с устройством от других ступеней КВД, крепление датчика, измеряющего зазор, в сегменте, реальная конструкция упругого элемента и его крепление к патрубку. К этому еще следует добавить сложную конструкцию сегментов, составленную из нескольких конструктивных элементов.
Сначала решим задачу для ступеней компрессора и турбины, у которых статор не охлаждается сжатым воздухом, отбираемым из ступени компрессора с меньшим номером, и НА и СА, расположенные за ступенью соответственно компрессора или турбины, жестко не связаны с опорой ротора, для современного мощного ТРДД, у которого расстояние между корпусами первого и второго контура, измеренное в радиальном направлении, существенно больше потребной длины базы, фиксирующей от недопустимого перекоса стержни механизмов позиционирования предлагаемых устройств управления радиальными зазорами (см. ниже), и тепловое удлинение корпуса первого контура в направлении продольной оси двигателя существенно больше этого теплового удлинения корпуса второго контура, и для мощного ТРД (например, корабельного или наземного), у которого также тепловое удлинение наружного корпуса в направлении продольной оси двигателя существенно больше этого теплового удлинения гондолы двигателя, или у ТРД любой мощности, у которого гондола или какая - то любая оболочка, охватывающая наружный корпус двигателя, отсутствует.
Поставленная задача решается тем, что предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, содержащее сегменты, составленные в кольцо, охватывающее рабочие лопатки ротора ступени компрессора или турбины с заданным радиальным зазором по концам лопаток, и с заданными зазорами между торцами соседних сегментов, радиально расположенные стержни, соединенные с этими сегментами, механизмы позиционирования, соединенные со стержнями и осуществляющие смещение стержней и сегментов в радиальных направлениях, в направлении к продольной оси двигателя или от нее, отличающееся тем, что стержни герметично и жестко закреплены в сегментах в бобышке каждого сегмента с натягом с помощью трубной резьбы и упругой разрезной контровочной шайбы, и стержни выполнены пустотелыми и на их свободном конце меньшего диаметра также нарезана трубная резьба, каждый сегмент охватывает только рабочие лопатки рабочего колеса ступени, или выполнен в виде сегмента НА компрессора или СА турбины, сегмент наружного кольца которого выполнен с такой шириной, что его часть, свободная от лопаток НА или СА с заданным начальным радиальным зазором охватывает рабочие лопатки ответного сектора ротора, а его сегмент внутреннего кольца НА или СА охватывает с заданным начальным радиальным зазором в ответном секторе ротора зубцы лабиринтного уплотнения, и сегмент наружного кольца сегмента имеет радиальное сечение в виде швеллера, а сами сегменты располагаются в кольцевой полости корпусной секции ступени, образованной двумя вертикальными кольцевыми фланцами, которые либо закреплены в тех же фланцевых стыках, что и корпусная секция, либо с помощью радиально расположенных штифтов закреплены на корпусной секции, причем сегменты размещены с минимально возможным зазором по боковым сторонам сегмента, они составлены в кольцо с возможностью смещения в радиальных направлениях относительно кольцевых фланцев и свободного теплового расширения, с зазорами по их торцам, расположенными по радиальным направлениям, причем величина каждого из этих зазоров выбрана возможно меньшей, обеспечивающей допустимую их величину на всех режимах работы двигателя, при всех допустимых смещениях сегментов в радиальных направлениях - обеспечивающей допустимую величину неуравновешенной силы, действующей на стержень со стороны газового тракта ступени в любой момент времени работы двигателя, а на наружной поверхности корпусной секции выполнены плоские опорные площадки, на которых с помощью штифтов, винтов и контровочных шайб и уплотнительного кольца герметично закреплены опоры, и стержни проходят во второй контур ТРДД или в пространство снаружи наружного корпуса ТРД через отверстия в площадках и центральные отверстия в опорах с возможно меньшим зазором, но таким, который исключает их заклинивание на всех режимах работы двигателя, и возможность перекоса сегмента относительно оси, параллельной продольной оси двигателя, расположенной в радиальной плоскости, проходящей через место крепления стержня к сегменту, приводящего к аварийной ситуации - столкновению рабочих лопаток с торцом сегмента, первым по направлению вращения ротора, или к врезанию рабочих лопаток в сегмент, или к недопустимому снижению КПД ступени, причем у ТРДД высота опоры и длина стержня выполнены такими, что не достигают внутренней поверхности корпуса второго контура двигателя, и у ТРДД и ТРД высота опоры такая, что обе внутренние цилиндрические поверхности опоры, на которые при перекосе опирается стержень, разнесены вдоль оси стержня на расстояние между начальным поперечным сечением одной опорной поверхности и конечным другой, приблизительно равное длине большего плеча сегмента, измеренной от места крепления стержня до его торца, и соединение стержня и опоры уплотнено двумя парами поршневых колец, расположенных в кольцевых канавках стержня, причем в каждой паре поршневых колец разрезы этих колец расположены диаметрально противоположно, причем в случае крепления кольцевого фланца к корпусной секции с помощью радиально расположенных штифтов, которые фиксируются от выпадания либо приливами, выполненными на опорах, либо завальцовкой, и на внешней поверхности корпусной секции, или соседней с ней корпусной секции, в плоскости, перпендикулярной продольной оси двигателя, выполнены бобышки, расположенные в тех же радиальных плоскостях, что и стержни, и в них по резьбе с помощью упругих разрезных контровочных шайб параллельно стержням закреплены тяги, на свободных концах стержней и тяг по резьбе с помощью упругих разрезных шайб закреплены опоры, причем под каждую опору, навинченную на тягу, установлена дистанционная шайба, толщина которой подобрана таким образом, чтобы плоские опорные поверхности опор, навинченных на стержень и тягу, расположенные в одной радиальной плоскости, были перпендикулярны продольным осям стержня и тяги и располагались на одном радиальном размере, измеренном от продольной оси двигателя, и каждый механизм позиционирования состоит из рычага второго рода и шарнирно скрепленных с ним своими опорами стержня и тяги, а каждый рычаг второго рода состоит собственно из рычага, выполненного в виде плоской пластины, опор с ушками, и шарнирное соединение опор стержней и тяг с рычагами, обеспечивающее смещение стержней и тепловое удлинение тяг строго в радиальных направлениях к продольной оси двигателя и от нее, выполнено с помощью осей, с натягом неподвижно закрепленных в отверстиях ушек их опор, и свободно проходящих через сквозные пазы в рычаге, причем ширина каждого паза равна диаметру оси, а его длина выполнена такой, чтобы при поворотах рычага обеспечивалось свободное проскальзывание осей относительно сторон паза, по которым рычаг контактирует с осями, и все оси в отверстиях, в которых они неподвижно закреплены, дополнительно законтрены от их смещения и проворота стопорными винтами, завернутыми в ушки, а сами стопорные винты законтрены от отворачивания завальцовкой или кернением, а сам рычаг закреплен в своей опоре с возможностью свободного поворота относительно оси, аналогичным образом закрепленной в его опоре, и с нулевым зазором, проходящей через отверстие в рычаге, причем рычаг расположен между ушками с зазором по его боковым сторонам 0,05÷0,15 мм, и с помощью штифтов, винтов и контровочных шайб опора рычага, закреплена на опорной площадке корпуса устройства, а опоры стержня и тяги, шарнирно скрепленные с рычагом, закреплены на опорных площадках опор, навинченных на стержень и тягу, и корпус предлагаемого устройства изготовлен из композитного материала с коэффициентом температурного расширения, в разы меньшим коэффициента температурного расширения материала корпусной секции, на которой закреплены тяги, и выполнен в виде кольца, у ТРДД охватывающего обечайку первого контура двигателя и детали предлагаемого устройства, а у ТРД охватывающего наружный корпус двигателя и детали этого устройства, причем на внутренней поверхности кольца выполнены распределенные по окружности плоские опорные площадки, на опорных плоскостях которых, перпендикулярных средним радиальным плоскостям площадок, закреплены с помощью штифтов, винтов и контровочных шайб опоры рычагов, а на одном из торцов корпуса выполнены прямоугольные фланцы, которыми корпус с помощью болтов и самоконтрящихся гаек крепится к прямоугольным фланцам тепловых компенсаторов, расположенных в тех же радиальных плоскостях, что и стержни и тяги, а сам тепловой компенсатор выполнен из каленой шлифованной ленты, изготовленной из жаростойкой нержавеющей стали, сгофрированной в гармошку, и компенсаторы скреплены с прямоугольными фланцами заклепками, прямоугольный фланец также изготовлен из композитного материала, и компенсатор центрируется и крепится к корпусной секции в том же фланцевом стыке, что и сама корпусная секция крепится к наружному корпусу первого контура ТРДД или к наружному корпусу ТРД, а в трех опорах, навинченных на тяги, равнорасположенных по окружности, по резьбе с помощью упругих разрезных контровочных шайб в тех же радиальных плоскостях, что и тяги, параллельно им закреплены стержни, проходящие сквозь отверстия в стальных втулках, запрессованных в корпусе, с возможно меньшим зазором, но таким, что исключает возможность заклинивания стержня в корпусе при тепловом удлинении тяги, каждая группа деталей устройства, расположенных внутри корпуса закрыта обтекателем из композитного материала, выполненным в виде пустотелой лопатки с симметричным профилем поперечного сечения, и закрепленного на корпусе или на корпусе и опорных площадках корпусной секции винтами и контровочными шайбами, и в корпусе над местами крепления опор механизмов позиционирования к опорам, навинченным на стержни, выполнены технологические отверстия, и для использования устройства на двух соседних ступенях оно просто тиражируется за исключением корпуса, компенсатора, тяг и обтекателей, но с другими требуемыми конструктивными параметрами, которые могут изменяться количественно, и при этом корпус, компенсатор, тяги и обтекатели выполняются общими для устройств обеих ступеней.
В конструкции предлагаемого устройства не использованы устройства, традиционно используемые в тепловых или механических устройствах управления радиальными зазорами между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя: силовые приводы, охлаждающий сжатый воздух, отбираемый из-за какой-нибудь ступени компрессора, нагреватель, датчики измерения перемещений, многоканальный прибор для считывания показаний датчиков, бортовой компьютер и другие электрические устройства, необходимые для организации автоматической работы устройства по программе, заложенной в компьютере, связующее кольцо и шарнирные связи его с приводом (приводами) и механизмами позиционирования.
Работа предлагаемого устройства базируется на использовании как процесса, используемого в тепловых устройствах, так и процесса механического управления радиальными зазорами, используемого в механических устройствах управления. Поэтому предлагаемое устройство следует отнести к некоемому новому гибридному классу этих устройств, который мы взяли на себя смелость классифицировать как «термомеханические устройства управления радиальными зазорами».
Так в предлагаемом устройстве для установки требуемой величины радиального зазора в качестве привода использован естественный тепловой процесс, протекающий в любом работающем газотурбинном двигателе - радиальное тепловое расширение статора первого контура двигателя, и пропорциональная передача величины этого расширения, через механические передаточные звенья - тяги, механизмы позиционирования, исполнительному звену - стержням и сегментам, смещения которых в радиальных направлениях, к продольной оси двигателя и от нее, и устанавливает требуемую величину радиального зазора.
Это устройство можно применять для одной или двух ступеней компрессора (в том числе и для КВД, хотя при использовании предлагаемого устройства для последней ступени КВД целесообразным может оказаться его конструктивная доработка, описанная ниже) и турбин с неохлаждаемым статором, у которых внутренние полости статора не герметизированы и допускается попадание горячего газа из газового тракта ступени турбины в эти полости через зазоры по торцам сегментов.
Отметим, что установка и крепление лопаток НА компрессора или СА турбины выполнена известным традиционным способом, и не описывается в формуле изобретения и описании.
Для мощных современных ТРДД рекомендуется использовать устройства с 10÷12 механизмами позиционирования (сегментами).
Высота опоры, закрепленной на корпусной секции, и длина стержня выполнены такими, что не достигают внутренней поверхности корпуса второго контура ТРДД. Этим обеспечивается сборка второго контура двигателя (установка на двигатель наружного корпуса второго контура).
Кроме того, высота этой опоры такая, что обе внутренние цилиндрические поверхности опоры, на которые при перекосе опирается стержень, разнесены вдоль оси стержня на расстояние между начальным поперечным сечением одной опорной поверхности и конечным другой, приблизительно равное длине большего плеча сегмента, измеренной от места крепления стержня до его торца. Зазор между стержнем и этой опорой, выбран возможно меньшим, но таким, что исключают возможность заклинивания стержня в опорах на всех режимах работы двигателя. Эти зазоры существенно меньше радиальных зазоров по концам рабочих лопаток на всех режимах работы двигателя. При указанном расстоянии в опоре между начальным поперечным сечением одной опорной поверхности и конечным другой торец большего плеча сегмента при его максимально возможном перекосе смещается в радиальном направлении только в пределах этого зазора, и, следовательно, величина этого смещения существенно меньше радиального зазора и не создает аварийных ситуаций, связанных с врезаниями лопаток в сегмент или поломкой лопаток.
Наружный диаметр D стержня выбран из условия обеспечения надежности и конструктивности уплотнения соединения поршневыми кольцами, и D=30÷40 мм, и неуравновешенная сила, действующая на стержень от давления на сегмент газа в газовом тракте последней ступени КВД πк=3÷5 МПа, равная Р=πк⋅π⋅D2/4, может достигать 6000 Н. Но на тягу действует в 4÷5 раз меньшая сила PT=Р⋅L1/L2, где L1 - меньшее плечо рычага между осями опоры рычага и крепления стержня, L2 - большее плечо рычага между осями опоры рычага и крепления тяги, и, следовательно, тяга может без возникновения сколько нибудь существенных сжимающих напряжений свободно удлиняться с ростом рабочей температуры, и диаметр тяги может быть выбран равным 7÷10 мм.
Применение поршневых уплотнительных колец обеспечивает возможность смещения стержня и тяги в радиальном направлении без разгерметизации стыка между ними и опорами. Использование пар поршневых колец и размещение стыков поршневых колец пары в диаметрально противоположных радиальных сечениях перекрывает все возможные каналы утечек и герметизирует этот стык.
Выполнение механизма позиционирования в виде рычага второго рода (L=L2), или (L=L1), шарнирно соединенного с опорой рычага и опорами стержня и тяги, где L - длина рычага, во-первых, целесообразно в предлагаемом устройстве для всех случаев, встречаемых в газотурбинных двигателях (см. ниже), и, во-вторых, обеспечивает существенное упрощение сборки устройства засчет выполнения сначала отдельной сборки механизмов позиционирования и затем их закрепления на корпусе устройства (см. ниже).
Установка под опоры, навинченные на тяги, дистанционных шайб позволяет точно установить величину монтажного радиального зазора и закон его изменения в окружном направлении.
Наличие технологических отверстий в корпусе позволяет после установки корпуса, собранного с механизмами позиционирования, на опоры, навинченные на тяги и стержни, закрепить корпус и механизмы позиционирования на этих опорах. Кроме того, через эти отверстия осуществляется подача охлаждающего воздуха к деталям устройства, закрытым обтекателями.
Жесткость тепловых компенсаторов подобрана таким образом, что на всех режимах работы двигателя нагружает корпус устройства, с помощью их скрепленный с корпусной секцией, допустимыми, радиально направленными растягивающими силами, возникающими из-за разности тепловых радиальных расширений корпуса и корпусной секции, а прохождение стержней, закрепленных на опорах, навинченных на тяги, параллельно тягам, с возможно меньшим зазором через отверстия в корпусе, вместе тепловыми компенсаторами ограничивает смещения корпуса устройства, как твердого тела, допустимыми значениями, не приводящими к аварийным ситуациям и не снижающим эффективность предлагаемого устройства (не приводящему к недопустимому КПД ступени). Выполнение зазора в отверстиях, через которые проходят стержни, величиной в несколько сотых мм вполне достаточно, чтобы исключить возможность заклинивания стержней в отверстиях из-за разности тепловых удлинений в направлении продольной оси двигателя и при этом обеспечить достаточные свободу и независимость тепловых расширение корпуса и корпусной секции в радиальных направлениях.
С целью снижения взаимного износа осей и рычагов предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что оси изготавливают из бронзы БрС30 и наносят на них слой твердой смазки.
Оси опор рычагов механизмов позиционирования изготовлены из бронзы БрС30 потому, что коэффициент трения скольжения бронзы БрС30 по стали при смазке по одному источнику (см. Интернет, Справочник конструктора-машиностроителя, sprav-constr.ru/htm/tom1/pages/chapter1/ckm18.html) равен μ=0,004, а по другому источнику (см. Интернет, Марочник металлов, metallicheckiy-portal/ru/marki_metallov/broBrS30) μ=0,009, а, следовательно, работа трения и интенсивность износа осей и рычагов при изготовлении осей из бронзы БрС30 будут также примерно в 9 раз меньше, чем при изготовлении их, например, из стали, но при полном износе слоя смазки - только приблизительно в 2 раза, так как коэффициент трения скольжения бронзы БрС30 по стали без смазки μ1=0,165 (см. Марочник металлов). Очевидно, что для снижения износа осей на оси можно надеть подшипники качения, но это существенно усложнит конструкцию устройства, увеличит его габариты и массу.
Радиальное тепловое расширение статора Cs компрессора у современных авиационных двигателей может достигать 4-х мм и турбины - 5-ти мм и более (см. Данильченко В.П., Лукачев С.В., Копылов Ю.Л. [и др.]. Проектирование авиационных газотурбинных двигателей. - Самара, Изд-во СНЦ РАН, 2008. - 619 с.) и рассогласование радиальных тепловых расширений статора и ротора Csr=Cs-Cr, где Cr - радиальное тепловое расширение ротора и Cs - радиальное тепловое расширение статора, у большинства современных авиационных газотурбинных двигателей, у которых эта задача достаточно хорошо решена, у компрессоров менее 1 мм, а у турбины не более 1,5 мм.
Рассмотрим теперь следующие возможные случаи решения задачи согласования величин деформаций статоров и роторов ТРДД и ТРД, вычисляемых у ротора, как сумма его теплового радиального расширения, вытягивания рабочей лопатки и замковой части диска ступени и зазора в демпфере со сдавливаемой пленкой смазки, равного 0,1÷0,15 мм, и у корпусной секции, как сумма ее теплового расширения, статической деформации под действием давления воздуха в газовом тракте первого контура ТРДД или в газовом тракте ТРД и ее динамической деформации.
Вычисление всех этих деформаций с целью их дальнейшего использования для проектирования предлагаемого устройства требует дополнительных разъяснений.
Во-первых, все эти деформации, вычисляются для трех режимов работы двигателя: крейсерского, малого газа и приемистости на взлетном режиме при уходе самолета на второй круг. Эти режимы выбраны потому, что на крейсерском режиме двигатель работает наибольшее время, и снижение, например, Ср на этом режиме, даст наибольшую экономию топлива, а при приемистости на взлетном режиме при уходе самолета на второй круг (взлетном режиме), как уже указывалось, возможен провал тяги, и на малом газе при останове двигателя возможно врезание рабочих лопаток в статор.
Во-вторых, деформации ротора вычисляются для поперечного сечения, в котором расположены места крепления стержней к сегментам. Использование вместо его динамической деформации величины, равной 0,1÷0,15 мм, обусловлено тем, что ротор предложено считать «жестким», и, следовательно, его динамические деформации меньше или равны меньшему из зазоров в демпферах опор ротора.
В-третьих, деформации корпусной секции вычисляются для ее поперечного сечения, в котором на ней крепится тяга.
В-четвертых, необходимо определить момент времени, в который механизм позиционирования сместит стержень (сегмент) в положение, в котором радиальный зазор между сегментом и концами рабочих лопаток будет минимален. При использовании в предлагаемом устройстве рычагов второго рода этот момент времени будет соответствовать минимальному значению функции

В (1) и ниже (') обозначены суммы всех деформаций детали - тепловых, статических, динамических, t - время, Cst'(t) - зависимость суммы всех деформаций от времени корпусной секции в поперечном сечении, в котором крепятся тяги, Csk'(t) - зависимость суммы всех деформаций от времени корпуса предлагаемого устройства в поперечном сечении, в котором крепятся опоры рычагов.
В-пятых, коэффициент линейного теплового расширения композитного материала можно менять в широких пределах (вплоть до нулевого значения), изменяя структуру материала. Если коэффициент линейного теплового расширения композитного материала, например, в разы меньше коэффициента линейного теплового расширения сплава, из которого изготовлена корпусная секция, условие C'sk<C'st гарантировано может быть выполнено и созданы условия для применения предлагаемого устройства с конструктивными параметрами с рычагами второго рода (L=L2), или с рычагами второго рода (L=L1).
В-шестых, зададим этому минимальному радиальному зазору на крейсерском режиме работы двигателя возможно наименьшее, оптимальное значение Zop и определим величину плеча рычага L1 между осями опоры рычага и крепления стержня, т.е. место крепления стержня к сегменту.
Выведем соотношения для определения плеча рычага L1 только для случая использования рычага в виде параллелепипеда, расположенного у неработающего двигателя параллельно его продольной оси (см. фиг. и). У этих устройств расстояние от внутренней поверхности сегмента, охватывающей рабочие лопатки, до оси крепления стержня к рычагу  и расстояние
и расстояние  от наружной поверхности корпусной секции до оси крепления тяги к рычагу постоянны и не зависят от расположения мест крепления стержня и тяги и их значения заданы.
от наружной поверхности корпусной секции до оси крепления тяги к рычагу постоянны и не зависят от расположения мест крепления стержня и тяги и их значения заданы.
Случаи наклонного расположения рычага, выполнения его в форме бумеранга, профилирования стенки швеллера сегмента, охватывающей рабочие лопатки, по некоторой кривой решаются аналогично, только в этих случаях величины и являются функциями координаты X, направленной в направлении продольной оси двигателя, и не рассматриваются.
Считаем, что четыре пункта из перечисленных пяти выполнены полностью, и, следовательно, считаем, что задача согласования тепловых радиальных расширений статоров и роторов ТРДЦ или ТРД решена разработчиком и известны значения параметров C'st, C'r, C'sk на всех режимах работы двигателя, или, по крайней мере, на крейсерском режиме, малом газе и приемистости при уходе самолета на второй круг, и известен один из двух рассматриваемых здесь случаев, реализуемых на двигателях:
1. Случаи, когда C'st>C'r, и C'sk<C'st.
2. Случаи, когда C'st<C'r и C'sk<C'st.
Здесь C'r - сумма теплового радиального расширения, вытягивания рабочей лопатки и замковой части диска ступени ротора и динамической его деформации, принятой равной зазору в демпфере со сдавливаемой пленкой смазки, равного 0,1÷0,15 мм.
Выбрана ступень компрессора или турбины, на которую будет установлено предлагаемое устройство управления и, следовательно, известна величина диапазона, измеренная вдоль продольной оси двигателя, в которой разработчик может конструктивно поместить поперечную плоскость сечения, в которой размещены места крепления тяг, и задаться конструктивными значениями длины плеча рычага L2 между осями опоры рычага и тяги, и задать расстояние от внутренней поверхности сегмента, охватывающей рабочие лопатки, до оси крепления стержня к рычагу  и расстояние от наружной поверхности корпусной секции до оси крепления тяги к рычагу, величины монтажного радиального зазора между статором и концами рабочих лопаток ступени Zm. Кроме того, будем считать, что разработчику, по крайней мере, известен допустимый диапазон величин этого зазора на крейсерском режиме, малом газе и приемистости при уходе самолета на второй круг, и он в этом диапазоне задал требуемое оптимальное значение величины радиального зазора на крейсерском режиме значение Zop.
и расстояние от наружной поверхности корпусной секции до оси крепления тяги к рычагу, величины монтажного радиального зазора между статором и концами рабочих лопаток ступени Zm. Кроме того, будем считать, что разработчику, по крайней мере, известен допустимый диапазон величин этого зазора на крейсерском режиме, малом газе и приемистости при уходе самолета на второй круг, и он в этом диапазоне задал требуемое оптимальное значение величины радиального зазора на крейсерском режиме значение Zop.
Рассмотрим случай, когда C'st>C'r, и C'sk<C'st. Очевидно, что в этом случае в предлагаемых устройствах управления радиальными зазорами в ГТД в качестве механизма позиционирования используются рычаги второго рода (L=L2).
Определим величину плеча рычага между осями опоры рычага и стержня L1, требуемую для обеспечения заданной величины радиального зазора в ступени на крейсерском режиме Zop и величины этих зазоров на малом газе Zmg и приемистости Zp и сравним эти две последние величины с допустимыми значениями этих зазоров.
Графическое решение этой задачи (определение величины L1) см. на фиг. 6.
Определим эти параметры аналитически.
Зададим координаты X-Y, как это показано на фиг. 6. Величины C'st, C'r и C'sk и считаем известными, как для крейсерского режима, так и для режимов малого газа и приемистости при уходе самолета на второй круг, в моменты времени, когда на этих режимах функция C'(t) достигает минимального значения. Известны также величины L2=L, , , Zm, Zop и координаты точек 2 и 3 - Х2 и Х3, и, следовательно, считаем известными величины теплового удлинения расстояний и - величины Сс и Ct, как для крейсерского режима, так и для режимов малого газа и приемистости при уходе самолета на второй круг. Увеличением расстояний и засчет удлинений стержня и тяги под действием статических и динамических сил пренебрегаем.
Тогда радиальное смещение точки 3 будет равно:

Радиальное смещение точки 2 будет равно:

Запишем радиальное смещение стержня Sc, как функцию параметров C'r, Cc, Zm и Zop

Для определения координаты места крепления стержня к сегменту Х1 и величины плеча рычага L1 используем уравнение прямой, проходящей через точки 2 и 3:

Подставив в (5) (2), (3) и (4) и величины C'sk, C'st, C'r, Ct и Cc для крейсерского режима работы двигателя, найдем

Тогда плечо рычага L1 определим из соотношения:

Далее проверяем насколько удачно найдено плечо рычага L1.
Для чего определим величины радиальных зазоров на режиме малого газа Zmg и при приемистости при уходе самолета на второй круг Zp и сравним эти значения с допустимыми Zmgd и Zpd, значения которых выбраны из условия обеспечения требуемых достаточно высокого КПД двигателя и достаточно низкого удельного расхода топлива Ср.
Величины Zmg и Zp найдем из (6), подставив в него соответственно вместо Zop одну из этих величин и соответствующие ей значения C'sk, C'st, C'r, Ct и Сс, найденные для режима малого газа или приемистости в моменты t, в которые на этих режимах функция (1) достигает минимума, и разрешив (6) относительно этой величины, в виде:

Если плечо L1 получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги расчет устройства заканчивают.
Поэтому для использования в случаях, когда C'st>C'r, и C'sk<C'st, предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что его рычаг выполнен в виде рычага второго рода (L=L2), и сам рычаг имеет форму параллелепипеда, и на неработающем двигателе расположен параллельно продольной оси двигателя, и координата крепления стержня к сегменту X1 определяется из соотношения

и плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, определяется из соотношения

в этих соотношениях C'r - сумма теплового радиального расширения ротора, вытягивания рабочей лопатки и замковой части диска ступени под действием центробежных сил в поперечном сечении, где расположено крепление стержня к сегменту, и зазора в демпфере со сдавливаемой пленкой смазки опоры ротора, C'st - сумма теплового радиального расширения корпусной секции и ее деформаций в радиальном направлении под действием давления в газовом тракте первого контура ТРДД или в газовом тракте ТРД и динамических сил в поперечном сечении, где расположено крепление тяги, C'sk - сумма теплового радиального расширения корпуса устройства и его деформаций в радиальном направлении под действием динамических сил у ТРДД или ТРД в поперечном сечении, где расположена опора рычага, причем параметры C'st, C'r и C'sk определены на крейсерском режиме работы двигателя в момент времени t, когда функция

достигает минимума, Сс - тепловое удлинение расстояния от места крепления стержня к сегменту до оси крепления к рычагу опоры, закрепленной на опоре, навинченной на стержень, и Ct - тепловое удлинение расстояния от места крепления тяги к корпусной секции до оси крепления к рычагу опоры, закрепленной на опоре, навинченной на тягу, определенные на крейсерском режиме работы двигателя, Zop - заданная возможно наименьшая, оптимальная величина радиального зазора между концами рабочих лопаток ротора и статором компрессора или турбины на крейсерском режиме, Zm - заданная монтажная величина этого зазора, Х2 - заданная координата расположения оси крепления к рычагу опоры, закрепленной на опоре, навинченной на тягу, Х3 - заданная координата расположения оси опоры рычага, L2=Х2-Х3 плечо рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, причем эти параметры заданы таким образом, что величина Zmg радиального зазора по концам рабочих лопаток ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения

при соответственной подстановке в него C'st, C'sk, C'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, плечо L1 получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
Если же Zmg≤Zmgd и на малом газе возникает опасность врезания рабочих лопаток, или же Zp≥Zpd при приемистости на столько, что на взлетном режиме возникает провал тяги, или получились не конструктивными параметры самого рычага, то можно возникшую проблему решать двумя путями: изменять координату Х2 или координаты Х2 и Х3 и повторять расчет пока не выполняться описанные выше условия его окончания. Если при использовании рычага второго рода (L=L2) не удается выполнить описанные выше условия или же получаются неконструктивные параметры рычага, рекомендуется применять устройство механического управления радиальными зазорами, например, по заявке №2017137183.
Рассмотрим теперь случаи, когда C'st<C'r и C'sk<C'st.
В этих случаях в предлагаемом устройстве используется рычаг второго рода (L=L1).
Определим параметры L1 и L аналитически. Параметры L2, Х2, Х3, Zm, Zop, Zmgd и Zpd также считаем заданными.
В этом случае радиальное смещение точки 3 Y3 (см. фиг. 8) определяется из (2), радиальное смещение точки 2 Y2 - из (3) и радиальное смещение точки 1 - из (4), координата расположения места крепления стержня к сегменту X1 также определяется из (6), но при подстановке в эти выражения значения параметров Ct и Сс на крейсерском режиме работы двигателя и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, а радиальные зазоры Zmg или Zp - из (8), но при подстановке в эти выражения значения параметров C'st, C'sk, C'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, и плечо рычага L1 определяется из соотношения (7).
Поэтому для использования в случае, когда C'st<C'r и C'sk<C'st, предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что его рычаг выполнен в виде рычага второго рода (L=L1), и сам рычаг имеет форму плоской пластины, и на неработающем двигателе расположен параллельно продольной оси двигателя, и координата крепления стержня к сегменту X1 определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на крейсерском режиме работы двигателя и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, и заданных параметров: Zop - возможно наименьшей, оптимальной величины радиального зазора между концами рабочих лопаток ротора и статором компрессора или турбины на крейсерском режиме, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси крепления опоры тяги рычагу, Х3 - координаты расположения оси опоры рычага, L2=X2-Х3 плеча рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, причем эти параметры заданы таким образом, что величина Zmg радиального зазора по концам рабочих лопаток ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения (8) при соответственной подстановке в него C'st, C'sk, C'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, чтобы плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, определенное из соотношения (7), получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
Если же Zmg≤Zmgd и на малом газе возникает опасность врезания рабочих лопаток, или же Zp≥Zpd при приемистости на столько, что на взлетном режиме возникает провал тяги, или получились не конструктивными параметры самого рычага, то можно возникшую проблему решать двумя путями: изменять координату Х2 или координаты Х2 и Х3 и повторять расчет пока не выполняться описанные выше условия его окончания. Если не удается исключить возможность врезания рабочих лопаток в сегменты с помощью рычага второго рода (L=L1) можно применить устройство механического управления радиальными зазорами, например, устройство по заявке №2017137183
Кроме того, в этом случае, когда при приемистости на взлетном режиме получился столь малый зазор Zp, что возможно врезание лопаток на этом режиме, этот случай возможен при применении предлагаемых устройств, предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя, отличающееся тем, что задают величину Zp=Zpop, где Zpop возможно наименьшая, но исключающая врезание лопаток величина радиального зазора на взлетном режиме, и координата крепления стержня к сегменту X1 определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на взлетном режиме и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, и заданных параметров: Zpop, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси крепления опоры, закрепленной на опоре, навинченной на тягу, Х3 - координаты расположения оси опоры рычага, L2=Х2-Х3 плеча рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, и из соотношения (8) при соответственной подстановке в него C'st, C'sk, C'r, определенных для крейсерского режима и режиме малого газа в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов определяются величина радиального зазора на крейсерском режиме Zkr и величина радиального зазора на режиме малого газа Zmg, и для известных координат X1, Х2, Х3 определяется плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, и при этом на малом газе отсутствует врезание рабочих лопаток, а на крейсерском режиме обеспечивается требуемые величины КПД ступени и удельного расхода топлива двигателем Ср.
Если параметры L1, КПД ступени, Ср, или один из этих параметров окажется неприемлемым, или на режиме малого газа может произойти врезание лопаток, рекомендуется использовать устройство механического управления радиальными зазорами, например, устройство по заявке №2017137183.
С целью снижения вибраций устройства и расширения диапазона допустимого износа осей и пазов рычага, в котором обеспечивается безопасный запуск двигателя и его безопасная работа предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что каждый рычаг дополнительно упруго подвешен на упругогистерезисном элементе, закрепленном на опоре или двух опорах, закрепленных на корпусе устройства, и контактирующим с натягом на всех режимах работы двигателя с рычагом (L=L2) на плече L4<L1 или с рычагом (L=L1) на плече L4<L2, создающим радиальное усилие, действующее на рычаг в направлении от продольной оси двигателя, по величине большее или достаточное для смещения у неработающего двигателя стержня с сегментом в этом направлении на величину зазора, образовавшегося от взаимного износа осей и пазов.
С этой же целью предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что упругогистерезисные элементы устройства выполнены либо в виде спиральной пружины сжатия, одним торцом без зазора одетой на штифт, запрессованный в опору, закрепленную на корпусе устройства, а другим торцом контактирует с рычагом с натягом

в случае использования рычага (L=L2), и с натягом

в случае использования рычага (L=L1), где C'rm - максимальное значение функции C'r, вычисленное для взлетного режима, либо упругогистерезисные элементы выполнены в виде упругого разрезного кольца, одетого без зазора на штифт, запрессованный в опору, закрепленную на корпусе устройства, и контактирующего с рычагом с натягом (9) в случае использования рычага (L=L2), или (10) в случае использования рычага (L=L1), либо в виде гофра, своими концами одетого с зазорами на штифты, запрессованные в опору, закрепленную на корпусе устройства, и контактирующего с рычагом в своем среднем поперечном сечении с таким же натягом - (9) или (10), и величина плеча L4 выбрана из условия обеспечения конструктивности рычага и конструктивности и прочности упругогистерезисного элемента.
На различных режимах работы двигателя величина натяга Н меняется от величины, определяемой соотношениями (9) или (10) у неработающего двигателя, до величины Н=0,1÷0,2 мм на взлетном режиме.
Этот натяг создает усилие, в конечном счете, действующее на сегмент, в радиальном направлении от продольной оси двигателя. Вместе с неуравновешенным усилием, действующим на сегмент в том же направлении со стороны газового тракта, при взаимном износе пазов и осей рычага это усилие сдвигает сегмент в этом радиальном направлении на величину зазора между пазом и осью, образовавшегося вследствие их износа, на всех режимах работы двигателя. Следовательно, по мере роста износа этих элементов устройства величина радиального зазора между сегментом и рабочими лопатками будет возрастать и во время всего ресурса работы двигателя (устройства) возможность возникновения аварийных ситуаций, связанных с врезанием рабочих лопаток в сегмент или столкновением рабочей лопатки с торцом сегмента, будут исключены.
Как уже указывалось, величина C'rm может достигать 4-х ÷ 5-ти мм, но для обеспечения комфортности выполнения условий конструктивности рычага и конструктивности и прочности упругогистерезисного элемента величину натяга, определяемую соотношениями (9) или (10), следует стремиться выбирать Н<1 мм. Подставив это значение натяга в (9) или (10), для известных значений L1 или L2 легко определим требуемую величину плеча L4.
Если условия конструктивности рычага или конструктивности и прочности упругогистерезисного элемента для указанных упругогистерезисных элементов не выполняются, а также с целью повышения демпфирующих свойств упругогистерезисных элементов предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что каждый рычаг упруго подвешен на двух симметрично расположенных с двух сторон рычага рессорах, выполненных каждая в виде многослойного пакета, набранного из стальных, каленых или нагартованных, шлифованных лент, изготовленных из нержавеющей стали, покрытых износостойким покрытием, либо сжатого равнораспределенной нагрузкой - давлением сжатого воздуха во втором контуре ТРДД, либо каждая рессора собрана в следующей компоновке: ее пакет собран из лент одинаковой толщины, в центре его установлены две, три и более гладких лент, на них с двух сторон установлены пакеты, собранные «гофр в гофр» из двух и более гофрированных лент таким образом, что вершины гофров одного пакета опираются на пакет гладких лент в тех же сечениях, что и вершины второго пакета, и шаг гофров гофрированных лент выбран таким, что в пролете пакета располагается только одна вершина, опирающаяся на пакет гладких лент в середине пролета, и под каждой опорой рессоры располагается только одна вершина гофра, а на пакеты гофрированных лент установлены пакеты, собранные из одной, двух и более гладких лент, и в собранной рессоре гофры гофрированных лент полностью выпрямлены, и центральные и концевые опоры рессор выполнены общими для обеих рессор, и опоры рессор выполнены разъемными и состоят из крышки и основания, которыми служат полки опор-кронштейнов, скрепленных винтами и контровочными шайбами, но у концевой опоры, закрепленной в средней части корпуса, крышки выполнены отдельно для каждой рессоры, и пакет каждой из рессор в центральной опоре и двух концевых опорах закреплен неподвижно с помощью скрепляющего крышку и основание винта, расположенного сбоку пакета без зазора в полукруглой выемке, выполненной в лентах, а в другой концевой опоре - двумя винтами, либо пакет в концевых опорах закреплен с возможностью смещения его концов вдоль его продольной оси в пределах прямого участка, выполненного в этом случае в центральной части полукруглой выемки, а в центральную опору запрессован упор из бронзы БрС30, и рессоры своими концевыми опорами закреплены на опорах-кронштейнах, закрепленных с помощью винтов и контровочных шайб на корпусе устройства, и при этом за счет упругой деформации пакетов создан натяг Н, определяемый из соотношения (9) или (10), прижимающий на плече L4 упор из бронзы БрС30 своим сферическим концом, покрытым твердой смазкой, с требуемым усилием, направленным радиально от продольной оси двигателя, к рычагу.
Здесь рекомендуемое значение натяга Н<1÷1,5 мм. Подставив это значение натяга в (9) или (10), для известных значений L1 или L2 легко определим требуемую величину плеча L4.
Упругая подвеска стержней (сегментов) на рессорах, выполненных в виде многослойного пакета, выбрана потому, что они расчетны (см. Эскин И.Д. Исследование обобщенных упругофрикционных характеристик демпферов и амортизаторов авиационных двигателей: дис.… канд. тех. наук / И.Д. Эскин. - Куйбышев: КуАИ, 1973. - 150 с.) и расчетом можно определить параметры рессоры, которые даже в случае ее большой податливости и большом прогибе, равном Н=1,5 мм и даже более будут вполне конструктивны. Неподвижную заделку многослойного пакета в опорах рессоры следует применять в том случае, когда, обеспечение прочности рессоры не приводит к неконструктивно большой длине рессоры, и когда сжимающие вдоль продольной оси рессору силы, возникающие за счет теплового удлинения рессоры, не приводят к потере устойчивости рессоры при воздействии на нее максимально возможной изгибающей нагрузки. Заметим, что действие такой сжимающей нагрузки может оказаться полезным так, как в этом случае при воздействии на рессору нагрузки, сжимающей ее вдоль продольной оси, и циклической изгибающей нагрузки коэффициент рассеивания рессоры увеличится во всем диапазоне амплитуд ее деформаций (см. Эскин И.Д., дис.… канд. тех. наук). Применение рессоры с заделкой многослойного пакета в концевых опорах с возможностью проскальзывания его концов в направлении продольной оси рессоры позволяет уменьшить длину рессоры.
Кроме того, предлагаемые рессоры обладают очень высокими демпфирующими характеристиками и эффективно гасят колебания деталей предлагаемого устройства. С ростом числа лент n в рессоре ее коэффициент рассеивания ψ растет и при n=10 достигает очень большой величины ψmax>4, и начиная с n=15 с дальнейшим ростом n растет асимптотически и при n=15 коэффициент рассеивания рессоры, сжатой равнораспределенной нагрузкой достигает очень большой величины ψmax=7, а у рессоры, собранной в вышеописанной компоновке, - ψmax=5 (см. Эскин И.Д., дис.… канд. тех. наук). Поэтому рекомендуется предпочтительно применять рессоры с n=10÷15 лент с толщиной h=0,3÷0,4 мм.
Выполнение у концевой опоры, закрепленной в средней части корпуса, крышек отдельно для каждой рессоры обеспечивает сборку этого предлагаемого устройства (см. ниже).
С целью уменьшения массы устройства предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что опоры стержней, закрепляемые на опорных площадках корпусной секции, выполнены из легкого сплава - титанового, алюминиевого, или магниевого, и в них запрессованы стальные втулки с расположенными в их канавках поршневыми уплотнительными кольцами.
С целью упрощения конструкции и уменьшения массы устройства для двух соседних ступеней компрессора или турбины предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что устройство состоит из двух частей - устройств управления радиальным зазором у ступени, объединенных в одно устройство управления радиальными зазорами у обеих ступеней деталями, общими для обоих устройств, причем устройства управления радиальным зазором у ступени, без общих деталей, выполнены, либо по любому, но одному и тому же пункту формулы изобретения, либо по любым но разным пунктам формулы изобретения, а, как общие детали, выполнены: тяги, навинченные на них опоры, установленные под ними дистанционные и контровочные шайбы, закрепленные на этих опорах двумя винтами и контровочными шайбами опоры с ушками, причем тяги закреплены на общей для обеих ступеней корпусной секции, и к опорам, закрепленным на опорах, навинченных на тяги, шарнирно прикреплены рычаги механизмов позиционирования каждого из устройств управления радиальным зазором у ступени, общими для обеих ступеней выполнены также: корпус устройства, тепловой компенсатор и три цилиндрических направляющих стержня, равнорасположенных по окружности, закрепленных параллельно тягам в опорах, закрепленных на опорах, навинченных на тяги, и проходящих через отверстия в корпусе с возможно меньшим зазором, но таким который исключает заклинивание этих стержней в отверстиях на всех режимах работы двигателя, и корпусная секция, каждая часть которой выполнена соответственно тому пункту формулы изобретения, которому соответствует устройство управления радиальным зазором у ступени, которую охватывает эта часть корпусной секции, и кольцевое пространство под корпусной секцией разделено между ступенями кольцевым вертикальным фланцем, закрепленным на ней радиально расположенными штифтами, запрессованными во фланец и корпусную секцию и зафиксированными от выпадания завальцовкой, и у ТРДД обтекатели, охватывающие тепловой компенсатор, механизмы позиционирования опоры стержней и сами стержни и опоры, закрепленные на них, устройств управления радиальными зазорами обеих ступеней, и тяги с закрепленными на них опорами.
Упрощение конструкции и существенное уменьшение массы устройства управления радиальным зазором для двух соседних ступеней достигается, прежде всего, засчет снижения на половину числа тяг, опор, навинченных на них, и опор, закрепленных на этих опорах, числа направляющих стержней и тепловых компенсаторов, уменьшения до двух числа фланцевых стыков корпусной секции, уменьшения числа крепежных деталей и массы обтекателей.
Применение предлагаемого автоматического устройства термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора позволит организовать более точную и гибкую, чем у современных авиадвигателей (см. выше), систему управления радиальными зазорами КВД. Особенно это важно для последней ступени КВД современных ТРДД с очень высоким πк и небольшой длиной рабочих лопаток, так как позволит уменьшить монтажный радиальный зазор в этой ступени, уменьшить расход воздуха с высоким потенциалом, отбираемого из-за последней ступени КВД, обеспечить работу двигателя на всех режимах полетного цикла с меньшими радиальными зазорами в этой ступени КВД, и, следовательно, повысить КПД КВД и двигателя в целом, снизить удельный расход топлива Ср, особенно на крейсерском режиме работы двигателя, избежать опасности врезания концов рабочих лопаток ротора КВД на режимах малого газа и провала тяги при приемистости двигателя при уходе самолета на второй круг.
Для применения на последней ступени КВД предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что каждый сегмент устройства выполнен в виде сегмента НА, расположенного перед рабочим колесом последней ступени КВД, содержащего часть, охватывающую рабочие лопатки колеса последней ступени КВД с радиальным зазором, и часть, охватывающую с радиальным зазором зубцы лабиринтного уплотнения сектора ротора перед рабочим колесом последней ступени КВД, и корпусная секция последней ступени КВД разделена на три кольцевых пространства, в которых размещены: НА, расположенный перед рабочим колесом, части сегментов, охватывающие рабочие лопатки колеса последней ступени КВД, и закреплен НА, расположенный за рабочим колесом, тремя вертикальными кольцевыми фланцами, два из которых закреплены в тех же фланцевых стыках, что и корпусная секция, а один, к которому крепиться этот НА, закреплен с помощью радиально расположенных штифтов, запрессованных во фланец и корпусную секцию и зафиксированных от выпадания либо приливами, выполненными на опорах стержней, закрепленных на корпусной секции, либо завальцовкой.
Выполнение сегментов устройства в виде сегмента НА, расположенного перед рабочим колесом последней ступени КВД, содержащего часть, охватывающую рабочие лопатки колеса последней ступени КВД с радиальным зазором, и часть, охватывающую с радиальным зазором зубцы лабиринтного уплотнения сектора ротора перед рабочим колесом последней ступени КВД, обусловлено тем, что НА, расположенный за рабочим колесом, жестко соединен с опорой ротора и не может быть использован как часть предлагаемого устройства управления радиальными зазорами.
Теперь решим поставленную задачу для ступени ТВД мощного авиационного ТРДД или ТРД.
Разработка устройства управления для ступени ТВД выделено в отдельную задачу потому, что конструкция ступени ТВД имеет следующие конструктивные особенности: статор ТВД охлаждается вторичным воздухом из камеры сгорания, СА, расположенные перед и за рабочим колесом ступени, жестко связаны с опорами ротора. Это приводит, во-первых, к необходимости обеспечения герметичного разделения газового тракта ступени и кольцевой полости под корпусной секцией и, во-вторых, СА нельзя разделить на сегменты, и, следовательно, предлагаемое устройство, в отличие от вышеописанных, может быть построено только для управления радиальным зазором по концам лопаток рабочего колеса ступени.
Поэтому предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что сегменты выполнены с шириной, измеренной вдоль продольной оси двигателя, охватывающей с заданным радиальным зазором только лопатки рабочего колеса ступени, и на внутренней поверхности стенки швеллера каждого сегмента, на его концах и в месте расположения бобышки, в которой крепится стержень, выполнены опорные площадки, свободные опорные поверхности которых являются частями цилиндрической поверхности, концентричной продольной оси двигателя, и сегменты с возможно меньшими зазорами по их полкам расположены в кольцевом пространстве, образованном корпусной секцией и двумя кольцевыми фланцами, закрепленными на корпусной секции радиально расположенными штифтами, запрессованными во фланцы и корпусную секцию и зафиксированными от выпадания приливами, выполненными у опор стержней, закрепленных на корпусной секции, сегменты одеты на разрезное упругое уплотнительное кольцо с нулевым зазором по фигурным фланцам, выполненным по его бокам, таким образом, что бобышка каждого сегмента с зазором проходит через отверстие в кольце, причем диаметр отверстия, через которое проходит бобышка стержня, расположенного противоположно разрезу кольца таков, что величина зазора между этой бобышкой и отверстием составляет 0,1÷0,2 мм, а другие отверстия, через которые проходят бобышки, выполнены в виде пазов с большим размером, направленным в окружном направлении, причем этот размер паза тем больше, чем паз ближе к разрезу кольца, и эти размеры пазов выполнены такими, что допускают максимальное потребное увеличение диаметра кольца, составленного из сегментов, и диаметра разрезного уплотнительного кольца, и фигурные фланцы упругого уплотнительного кольца имеют форму выступов с шириной, равной хорде опорных площадок, расположенных на концах соседних сегментов, перекрывающих стыки сегментов, с наружным диаметром, равным наружному диаметру полок сегментов, соединенных отбортовками, и на выступах и полках сегментов симметрично стыку полок соседних сегментов выполнены плоские опорные площадки, причем кромки этих опорных площадок оставлены острыми, а на фигурных фланцах герметично закреплены упругие уплотнительные элементы, изготовленные из нержавеющей, закаленной, шлифованной ленты из жаропрочной стали или сплава, без зазоров одной полкой опирающиеся на плоские опорные площадки, а другой полкой прижатые к кольцевому фланцу, с которым контактируют полки сегментов, на которые опираются эти упругие элементы, и кромка, по которой пересекаются опорные поверхности полок каждого упругого элемента также выполнена острой, и в собранном устройстве упругое уплотнительное разрезное кольцо с натягом прижато к опорным площадкам сегментов, и упругими элементами к плоским опорным площадкам и кольцевым фланцам, а на всех режимах работы двигателя уплотнительное кольцо и упругие элементы дополнительно прижаты к опорным площадкам еще и давлением вторичного воздуха, который поступает из камеры сгорания в кольцевую полость над наружным кольцом СА, расположенным перед рабочим колесом ступени, и через равнорасположенные отверстия в кольцевом фланце, закрепленном на корпусной секции штифтами, в кольцевую полость над сегментами и упругим уплотнительным разрезным кольцом, и из этой полости через равнорасположенные отверстия в другом таком же кольцевом фланце в кольцевую полость над наружным кольцом СА, расположенным за рабочим колесом ступени, и диаметры этих отверстий и их количество подобраны так, что приближенно выполняется одинаковость эпюр давления вторичного воздуха в кольцевой полости и давления на сегменты в газовом тракте ступени, и площади опорных площадок сегментов и плоских опорных площадок выбраны таким образом, чтобы на взлетном режиме усилия, действующие на тяги, были меньше допустимого, и разрез в упругом уплотнительном кольце выполнен в его поперечном сечение с отбортовками, и один из сегментов ступени выполняется с торцами, срезанными параллельно продольной оси стержня, закрепленного на этом сегменте, а ответные торцы двух сегментов, соседних с этим сегментом, срезаны так же, как у этого сегмента.
Упругое разрезное уплотнительное кольцо рекомендуется выполнять достаточно тонким, например, с толщиной 2÷5 мм, а требуемую жесткость кольца обеспечивать высотой отбортовок фигурных фланцев. Упругие уплотнительные элементы рекомендуется изготавливать из ленты толщиной 0,5÷1,0 мм.
Выполнение диаметра отверстия, через которое проходит бобышка стержня, расположенного противоположно разрезу кольца, таким, что величина зазора между этой бобышкой и отверстием составляет 0,1÷0,2 мм, фиксирует упругое разрезное уплотнительное кольцо в заданном положении так, что разрез кольца находится вне опорной площадки сегмента, а выполнение других отверстий, через которые проходят бобышки, в виде пазов с большим размером, направленным в окружном направлении, причем этот размер паза тем больше, чем паз ближе к разрезу кольца, и эти размеры пазов выполнены такими, что допускают тепловое расширение уплотнительного кольца в окружном направлении и максимальное потребное увеличение диаметра кольца, составленного из сегментов, и диаметра разрезного уплотнительного кольца. При этом упругое разрезное уплотнительное кольцо и упругие уплотнительные элементы, герметично закрепленные на его фигурных фланцах, на всех режимах работы двигателя (благодаря в том числе и наличию описанным выше острым кромкам) полностью перекрывают зазоры в стыках соседних сегментов и разделяют потоки вторичного воздуха в кольцевом пространстве над сегментами и газа в газовом тракте ступени ТВД.
Усилия, сжимающие тяги, возникают при их тепловом удлинении и тепловом расширении и других деформациях корпусной секции, на которой закреплены тяги. Эти усилия во многом определяются величиной равнодействующей сил сухого трения на опорных площадках, с которыми контактирует упругое разрезное уплотнительное кольцо и упругие уплотнительные элементы, и которые преодолеваются при смещении сегментов в радиальных направлениях и взаимном проскальзывании с трением сегментов относительно упругого разрезного уплотнительного кольца и упругих уплотнительных элементов, вызванном смещениями и удлинениями тяг в этих направлениях. Величина равнодействующей сил сухого трения прямо пропорциональна площади опорных площадок и величине давления вторичного воздуха, которое максимально на взлетном режиме двигателя.
Обеспечение приближенной одинаковости эпюр давления вторичного воздуха в кольцевой полости и давления на сегменты в газовом тракте ступени исключает появление моментов, скручивающих сегменты, вызывающих их перекос и перекос стержней.
Выполнение у одного из сегментов ступени с торцов, срезанных параллельно продольной оси стержня, закрепленного на этом сегменте, и ответных торцов двух сегментов, соседних с этим сегментом, срезанных так же, как у этого сегмента, обеспечивает возможность сборки этого предлагаемого устройства.
У мощных ТРДЦ, по-видимому, возможен случай, когда зазоры между торцами соседних сегментов у ступени компрессора для обеспечения свободного расширения сегментов в окружном направлении приходиться делать слишком большими, что может неприемлемо снизить эффективность предлагаемого устройства. В этом случае в конструкции предлагаемого устройства и в случае установки его на ступени компрессора целесообразно применить упругое разрезное уплотнительное кольцо с упругими уплотнительными элементами.
Поэтому предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что в упругом разрезном уплотнительном кольце выполнено два ряда пазов с большим размером, направленным в окружном направлении, расположенных над зазорами между торцами соседних сегментов, причем один ряд пазов расположен в области более высокого давления воздуха в газовом тракте ступени, а другой ряд - в области более низкого давления воздуха, и зазоры по торцам сегментов выполнены минимально допустимой величины, и такими, что на взлетном режиме двигателя величина зазора была 0,1÷0,2 мм, и на торце одного из соседних сегментов выполнены две выемки, расположенные под пазами, причем больший размер паза тем больше, чем паз ближе к разрезу кольца, и эти размеры пазов выполнены такими, что на всех режимах работы двигателя открыта площадь выемок, обеспечивающая высокую эффективность предложенного устройства, и в любой момент времени работы двигателя величина неуравновешенной нагрузки, действующей на сегменты со стороны газового тракта ступени не превышает допустимую величину.
Выполнение двух рядов пазов и их расположение в областях низкого и высокого давления в ступени позволяет обеспечить приближенную одинаковость эпюр давления воздуха в кольцевой полости и давления на сегменты в газовом тракте ступени.
У маломощных ТРД с небольшим πк, например, с πк=4÷10 и небольшим диаметром D рабочего колеса ступени ТВД, например, D=250-400 мм опорными площадками для упругого разрезного уплотнительного кольца могут служить все внутренние поверхности (за исключением бобышек, в которых крепятся стержни) стенок сегментов.
Поэтому с целью упрощения предлагаемой конструкции устройства предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что опорными площадками для упругого разрезного уплотнительного кольца служат все внутренние поверхности стенок сегментов, за исключением бобышек, в которых крепятся стержни.
С целью дальнейшего упрощения конструкции предлагаемого устройства для указанных маломощных ТРД, у которых тепловое удлинение статора в направлении продольной оси двигателя не велико, и возможно для крейсерского режима, как режима с некоторыми «средними» по интенсивности тепловыми параметрами, определить величины плеча L1 и отношения L1/L2 для заданного радиального зазора Zop и при этом получить хорошие значения радиальных зазоров при приемистости на взлетном режиме при уходе самолета на второй круг Zp, малом газе Zmg, и останове двигателя, обеспечивающие достаточно высокую эффективность предлагаемого устройства и на этих режимах работы двигателя. Причем двигатель установлен в гондоле.
Поэтому предлагается автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что корпус устройства непосредственно закреплен на гондоле и стержни, направляющие тяги и фиксирующие корпус, не ставятся, и длина пазов, выполненных в рычагах, допускает свободное проскальзывание вдоль них осей, закрепленных в опорах, закрепленных на опорах, навинченных на стержни и тяги, не только при повороте рычагов, но и смещении стержней и тяг в направлении продольной оси двигателя, вызванное тепловым удлинением статора двигателя, и для крейсерского режима величины плеча L1 и отношения L1/L2 определены так, что величина радиального зазора на этом режиме равна Zop и при этом получены хорошие значения радиальных зазоров при приемистости на взлетном режиме при уходе самолета на второй круг Zp, малом газе Zmg, и останове двигателя, обеспечивающие достаточно высокую эффективность предлагаемого устройства и на этих режимах работы двигателя.
Конструкция предлагаемого устройства упрощена засчет исключения из состава устройства теплового компенсатора и стержней, направляющих тяги и фиксирующих корпус.
В случае, если не удается при применении этого варианта конструкции обеспечить достаточно высокую эффективность этой конструкции на всех рабочих режимах двигателя предлагается использовать одну из предлагаемых конструкций устройства, у которых корпус устройства синхронно с тепловым расширением статора смещается в направлении продольной оси двигателя.
У ТРД наземного применения, у которых весь перепад давления срабатывается на турбине, вторичный воздух, подаваемый из КС в кольцевую полость над сегментами ступени турбины, стравливается через отверстия в стенках сегментов и упругого разрезного уплотнительного кольца в газовый тракт ступени турбины.
Предлагаемые автоматические термомеханические устройства для управления радиальным зазором между концами рабочих лопаток ротора и статором газотурбинного двигателя поясняются иллюстрациями. На фиг. рычаг в продольном разрезе показан, как «тонкая» стенка, не заштрихованным.
На фиг. 1 изображено изменение радиальных размеров ротора δrp и статора δrc, а также радиального зазора δrз в турбине НД двигателя НК - 8 - 2У на переходных режимах: τ - время в секундах, а - малый газ, b - приемистость, с - останов, d - повторная приемистость, е - взлетный режим, ƒ - крейсерский режим; 1, …, 8 - характерные точки, 3 - провал тяги на взлете, 8 - врезание рабочих лопаток;
на фиг. 2 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статором ступени компрессора ТРДД в продольном разрезе (фрагмент устройства);
на фиг. 3 изображен разрез по А-А на фиг. 2;
на фиг. 4 изображен разрез по Б-Б на фиг. 2;
на фиг. 5 изображена фиксация корпуса устройства с помощью направляющих стержней;
на фиг. 6 изображен пример графического решения задачи определения плеча L1 рычага второго рода (L=L2) между осями опоры рычага и стержня, при котором предлагаемое устройство установит заданную оптимальную величину радиального зазора на крейсерском режиме Zop; на фиг. штрихпунктирной линией с двумя точками показано положение рычага на крейсерском режиме, С - проскальзывание рычага относительно оси;
на фиг. 7 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статором ТРДД с рычагом второго рода (L=L1) в продольном разрезе (фрагмент устройства);
на фиг. 8 изображен пример графического решения задачи определения плеча L1 рычага второго рода (L=L1) между осями опоры рычага и стержня, при котором предлагаемое устройство установит заданную оптимальную величину радиального зазора на крейсерском режиме Zop; на фиг. штрихпунктирной линией с двумя точками показано положение рычага на крейсерском режиме, С - проскальзывание рычага относительно оси;
на фиг. 9 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора ТРДД с рычагами, дополнительно упруго подвешенными на рессорах, в продольном разрезе (фрагмент устройства);
на фиг. 10 изображен разрез по В-В на фиг. 9;
на фиг. 11 изображена компоновка пакета рессоры, собранная из гладких и гофрированных лент одинаковой толщины h;
на фиг. 12 изображен разрез по Г-Г на фиг. 10;
на фиг. 13 изображен разрез по Д-Д на фиг. 10;
на фиг. 14 изображен разрез по Е-Е на фиг. 12;
на фиг. 15 изображено расположение винтов по бокам пакета в полукруглых выемках в лентах рессор, разрез по Ж-Ж на фиг. 13;
на фиг. 16 изображено то же, но в полукруглых выемках с прямыми участками;
на фиг. 17 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, у которого опоры стержней и тяг, закрепляемые на опорных площадках корпусной секции, выполнены из легкого сплава - титанового, алюминиевого, или магниевого, и в них запрессованы стальные втулки с расположенными в их канавках поршневыми уплотнительными кольцами;
на фиг. 18 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины двухконтурного газотурбинного двигателя для двух ступеней компрессора и турбины газотурбинного двигателя;
на фиг. 19 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя для последней ступени КВД;
на фиг. 20 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора для ступени ТВД газотурбинного двигателя, у которого сегменты выполнены с шириной, измеренной вдоль продольной оси двигателя, охватывающей с заданным радиальным зазором только лопатки рабочего колеса ступени с разрезным упругим уплотнительным кольцом;
на фиг. 21 изображены сегменты и разрезное уплотнительное кольцо в развертке, вид по стр. 3 на фиг. 20, причем полки сегментов, фигурные фланцы упругого разрезного уплотнительного кольца и упругие уплотнительные элементы, закрепленные на кольце, на фиг. показаны не развернутыми и бобышки на фиг. изображены, как наложенная проекция, утолщенной штриховой линией;
на фиг. 22 изображен разрез по И-И на фиг. 21, на фиг. детали устройства в разрезе показаны не развернутыми;
на фиг. 23 изображен разрез по К-К на фиг. 22, изображение увеличено;
на фиг. 24 также изображен вид по стр. 3 на фиг. 20, но варианта автоматического устройства термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя для ступени компрессора, или ступени турбины, у которой статор не охлаждается воздухом из-за какой-нибудь ступени компрессора, у которой сегменты выполнены с частью, охватывающей с радиальным зазором сектор рабочих лопаток, и с частью НА или СА, охватывающей с радиальным зазором сектор лабиринтного уплотнения ротора, с разрезным упругим уплотнительным кольцом с двумя рядами пазов, рабочие лопатки, лопатки НА или СА и лабиринтное уплотнение на фиг. не показаны;
на фиг. 25 изображено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора ступени турбины газотурбинного двигателя, у которого корпус устройства непосредственно закреплен на гондоле двигателя;
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 2), содержащее сегменты 1, составленные в кольцо, охватывающее рабочие лопатки 2 ротора ступени компрессора или турбины с заданным радиальным зазором 3 по концам лопаток 2, и с заданными зазорами 4 (см. фиг. 3) между торцами 5 соседних сегментов 1, радиально расположенные стержни 6, соединенные с этими сегментами, механизмы позиционирования 7, соединенные со стержнями 6 и осуществляющие смещение стержней и сегментов в радиальных направлениях, в направлении к продольной оси двигателя или от нее. Стержни 6 (см. фиг. 2) герметично и жестко закреплены в сегментах 1 в бобышке 8 каждого сегмента с натягом с помощью трубной резьбы и упругой разрезной контровочной шайбы 9. Стержни 6 выполнены пустотелыми и на их свободном конце меньшего диаметра также нарезана трубная резьба. Причем каждый сегмент 1 охватывает только рабочие лопатки 2 рабочего колеса 10 ступени (см. фиг. 19), или выполнен в виде сегмента 11 НА компрессора (см. фиг. 2) или СА турбины, сегмент 12 наружного кольца которого выполнен с такой шириной, что его часть 13, свободная от лопаток НА или СА с заданным начальным радиальным зазором 3 охватывает рабочие лопатки 2 ответного сектора ротора, а его сегмент 14 внутреннего кольца НА или СА охватывает с заданным начальным радиальным зазором 15 в ответном секторе ротора зубцы лабиринтного уплотнения 16. Сегмент 12 наружного кольца сегмента 1 имеет радиальное сечение в виде швеллера. Сами сегменты 1 располагаются в кольцевой полости 17 корпусной секции ступени 18, образованной двумя вертикальными кольцевыми фланцами 19, закрепленных в тех же фланцевых стыках, что и корпусная секция 18, или фланцы 20 с помощью радиально расположенных штифтов 21 (см., например, фиг. 19) закреплены на корпусной секции 18. Причем сегменты 1 размещены с минимально возможным зазором по боковым сторонам сегмента. Они составлены в кольцо 22 (см. фиг. 3) с возможностью смещения в радиальных направлениях относительно кольцевых фланцев и свободного теплового расширения, с зазорами 4 по их торцам 5 (см. фиг. 3), расположенными по радиальным направлениям, причем величина каждого из этих зазоров выбрана возможно меньшей, обеспечивающей допустимую их величину на всех режимах работы двигателя, при всех допустимых смещениях сегментов 1 в радиальных направлениях - обеспечивающей допустимую величину неуравновешенной силы, действующей на стержень 6 со стороны газового тракта ступени в любой момент времени работы двигателя. На наружной поверхности корпусной секции 18 выполнены плоские опорные площадки 23 (см. фиг. 2), на которых с помощью штифтов 21 (см. фиг. 4), винтов 24 и контровочных шайб 25 и уплотнительного кольца 26 (см. фиг. 2) герметично закреплены опоры 27. Стержни 6 проходят во второй контур 28 ТРДД или в пространство снаружи наружного корпуса ТРД (на фиг. не показано) через отверстия в площадках 23 и центральные отверстия в опорах 27 с возможно меньшим зазором 29, но таким, который исключает их заклинивание на всех режимах работы двигателя, и возможность перекоса сегмента 1 относительно оси, параллельной продольной оси двигателя, расположенной в радиальной плоскости, проходящей через место крепления стержня 6 к сегменту 1, приводящего к аварийной ситуации - столкновению рабочих лопаток 2 с торцом 5 (см. фиг. 3) сегмента 1, первым по направлению вращения ротора, или к врезанию рабочих лопаток 2 в сегмент 1, или к недопустимому снижению КПД ступени. Причем у ТРДД высота опоры 27 и длина стержня 6 выполнены такими, что не достигают внутренней поверхности корпуса 30 (см. фиг. 2) второго контура двигателя, и у ТРДД и ТРД высота опоры 27 такая, что обе внутренние цилиндрические поверхности 31 опоры 27, на которые при перекосе опирается стержень 6, разнесены вдоль оси стержня на расстояние между начальным поперечным сечением одной опорной поверхности и конечным другой, приблизительно равное длине большего плеча сегмента 1 (см. фиг. 3), измеренной от места крепления стержня до его торца 5. Соединение стержня 6 и опоры 27 уплотнено двумя парами поршневых колец 32, расположенных в кольцевых канавках стержня 6. В каждой паре поршневых колец 32 разрезы этих колец расположены диаметрально противоположно, Причем в случае крепления кольцевого фланца 20 (см. фиг. 19) к корпусной секции 18 с помощью радиально расположенных штифтов 21, они фиксируются от выпадания либо приливами 33, выполненными на опорах 27, либо завальцовкой. На внешней поверхности корпусной секции 18 (см. фиг. 2), или соседней с ней корпусной секции, в плоскости, перпендикулярной продольной оси двигателя, выполнены бобышки 34, расположенные в тех же радиальных плоскостях, что и стержни 6. В них по резьбе с помощью упругих разрезных контровочных шайб 9 параллельно стержням 6 закреплены тяги 35. На свободных концах стержней 6 и тяг 35 по резьбе с помощью упругих разрезных шайб 9 закреплены опоры 36, причем под каждую опору 36, навинченную на тягу 35, установлена дистанционная шайба 37, толщина которой подобрана таким образом, чтобы плоские опорные поверхности опор 36, навинченных на стержень 6 и тягу 35, расположенные в одной радиальной плоскости, были перпендикулярны продольным осям стержня 6 и тяги 35 и располагались на одном радиальном размере, измеренном от продольной оси двигателя. Каждый механизм позиционирования 7 состоит из рычага второго рода 38 и шарнирно скрепленных с ним своими опорами стержня 6 и тяги 35, а каждый рычаг второго рода 38 состоит собственно из рычага 39, выполненного в виде плоской пластины, опор 40 с ушками 41 и опоры 42 рычага. Шарнирное соединение опор стержней и тяг с рычагами, обеспечивающее смещение стержней 6 и тепловое удлинение тяг 35 строго в радиальных направлениях к продольной оси двигателя и от нее, выполнено с помощью осей 43, с натягом неподвижно закрепленных в отверстиях ушек 41 их опор 40, и свободно проходящих через сквозные пазы 44 в рычаге 39. Причем ширина каждого паза 44 равна диаметру оси 43, а его длина выполнена такой, чтобы при поворотах рычага 39 обеспечивалось свободное проскальзывание осей 43 относительно сторон паза 44, по которым рычаг 39 контактирует с осями 43. Все оси 43 в отверстиях, в которых они неподвижно закреплены, дополнительно законтрены от их смещения и проворота стопорными винтами 45 (см. фиг. 4), завернутыми в ушки 41, а сами стопорные винты 45 законтрены от отворачивания завальцовкой или кернением. Сам рычаг 39 (см. фиг. 2) закреплен в своей опоре 42 с возможностью свободного поворота относительно оси 43, аналогичным образом закрепленной в его опоре 42, и с нулевым зазором, проходящей через отверстие в рычаге 39. Причем рычаг 39 расположен между ушками 41 с зазором по его боковым сторонам 0,05÷0,15 мм. Опоры 40 стержня 6 и тяги 35, шарнирно скрепленные с рычагом 39, закреплены на опорных площадках опор 36, навинченных на стержень 6 и тягу 35. Корпус 46 предлагаемого устройства изготовлен из композитного материала с коэффициентом температурного расширения, в разы меньшим коэффициента температурного расширения материала корпусной секции 18, на которой закреплены тяги 35, и выполнен в виде кольца, у ТРДД охватывающего обечайку 47 первого контура двигателя и детали предлагаемого устройства, а у ТРД охватывающего наружный корпус двигателя и детали этого устройства (на фиг. не показано). На внутренней поверхности этого кольца (см. фиг. 4) выполнены распределенные по окружности плоские опорные площадки 48, на опорных плоскостях которых, перпендикулярных средним радиальным плоскостям площадок, закреплены с помощью штифтов 21, винтов 24 и контровочных шайб 25 опоры 42 рычагов 39. На одном из торцов корпуса 46 (см. фиг. 2, 4) выполнены прямоугольные фланцы 49, которыми корпус 46 с помощью болтов 50 и самоконтрящихся гаек 51 крепится к прямоугольным фланцам 52 тепловых компенсаторов 53, расположенных в тех же радиальных плоскостях, что и стержни 6 и тяги 35. Сам тепловой компенсатор 53 (см. фиг. 2) выполнен из каленой шлифованной ленты, изготовленной из жаростойкой нержавеющей стали, сгофрированной в гармошку. Компенсаторы 53 скреплены с прямоугольными фланцами 52 заклепками 54. Прямоугольный фланец 52 также изготовлен из композитного материала. Компенсатор 53 центрируется и крепится к корпусной секции 18 в том же фланцевом стыке, что и сама корпусная секция крепится к наружному корпусу 55 первого контура ТРДД или к наружному корпусу ТРД (на фиг. не показано). В трех опорах 36, навинченных на тяги 35, равнорасположенных по окружности, по резьбе с помощью упругих разрезных контровочных шайб 9 в тех же радиальных плоскостях, что и тяги, параллельно им закреплены стержни 56, проходящие сквозь отверстия в стальных втулках 57 (см. фиг. 5), запрессованных в корпус 46, с возможно меньшим зазором, но таким, что исключает возможность заклинивания стержня 56 в корпусе 46 при тепловом удлинении тяги 35. Каждая группа деталей устройства, расположенных внутри корпуса 46 закрыта обтекателем 58 из композитного материала, выполненным в виде пустотелой лопатки (см. фиг. 4) с симметричным профилем поперечного сечения, и закрепленного на корпусе 46 винтами 24 и контровочными шайбами 25, или на корпусе (на фиг. не показано) и опорных площадках корпусной секции. В корпусе 46 (см. фиг. 2) над местами крепления опор 40 механизмов позиционирования 7 к опорам 36, навинченным на стержни 6, выполнены технологические отверстия 59. Для использования устройства на двух соседних ступенях оно просто тиражируется (см. фиг. 16) за исключением корпуса 46, компенсатора 53, тяг 35 и обтекателей 58, но с другими требуемыми конструктивными параметрами, которые могут изменяться количественно, и при этом корпус 46, компенсатор 53, тяги 35 обтекатели 58 выполняются общими для устройств обеих ступеней.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 2), отличающееся тем, что оси 43 изготавливают из бронзы БрС30 и наносят на них слой твердой смазки.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 2), отличающееся тем, что его рычаг 38 выполнен в виде рычага второго рода (L=L2), и сам рычаг 39 выполнен в виде плоской пластины, и на неработающем двигателе расположен параллельно продольной оси двигателя. Координата крепления стержня 6 к сегменту 1 X1 (см. фиг. 6) определяется из соотношения

и плечо рычага 39 L1 между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на стержень 6, определяется из соотношения

в этих соотношениях C'r - сумма теплового радиального расширения ротора, вытягивания рабочей лопатки и замковой части диска ступени под действием центробежных сил в поперечном сечении, где расположено крепление стержня к сегменту, и зазора в демпфере со сдавливаемой пленкой смазки опоры ротора, C'st - сумма теплового радиального расширения корпусной секции 18 и ее деформаций в радиальном направлении под действием давления в газовом тракте первого контура ТРДД или в газовом тракте ТРД и динамических сил в поперечном сечении, где расположено крепление тяги 35, C'sk - сумма теплового радиального расширения корпуса 46 устройства и его деформаций в радиальном направлении под действием динамических сил у ТРДД или ТРД в поперечном сечении, где расположена опора 42 рычага 39, причем параметры C'st, C'r и C'sk определены на крейсерском режиме работы двигателя в момент времени t, когда функция

достигает минимума, Сс - тепловое удлинение расстояния от места крепления стержня 6 к сегменту 1 до оси 42 крепления к рычагу 39 опоры 40, закрепленной на опоре 36, навинченной на стержень 6, и Ct - тепловое удлинение расстояния от места крепления тяги 35 к корпусной секции 18 до оси 43 крепления к рычагу 39 опоры 40, закрепленной на опоре 36, навинченной на тягу 35, определенные на крейсерском режиме работы двигателя, Zop - заданная возможно наименьшая, оптимальная величина радиального зазора 3 между концами рабочих лопаток 2 ротора и статором компрессора или турбины на крейсерском режиме, Zm - заданная монтажная величина этого зазора, Х2 - заданная координата расположения оси 43 крепления к рычагу 39 опоры 40, закрепленной на опоре 36, навинченной на тягу 35, Х3 - заданная координата расположения оси 43 опоры 42 рычага 39, L2=X2-Х3 плечо рычага 39 между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на тягу 35. причем эти параметры заданы таким образом, что величина Zmg радиального зазора 3 по концам рабочих лопаток 2 ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения

при соответственной подстановке в него C'st, C'sk, C'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, плечо L1 получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 7), отличающееся тем, что его рычаг 38 выполнен в виде рычага второго рода (L=L1), и сам рычаг 39 имеет форму плоской пластины, и на неработающем двигателе расположен параллельно продольной оси двигателя. Координата крепления стержня 6 к сегменту 1 Х1 (см. фиг. 8) определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на крейсерском режиме работы двигателя и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, и заданных параметров: Zop - возможно наименьшей, оптимальной величины радиального зазора 3 между концами рабочих лопаток 2 ротора и статором компрессора или турбины на крейсерском режиме, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси 43 крепления опоры 40 тяги 35 к рычагу 39, Х3 - координаты расположения оси опоры рычага, L2=Х2-Х3 плеча рычага между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на тягу 35. Причем эти параметры заданы таким образом, что величина Zmg радиального зазора 3 по концам рабочих лопаток 2 ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения (8) при соответственной подстановке в него C'st, C'sk, C'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, чтобы плечо рычага L1 между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на стержень 6, определенное из соотношения (7), получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
Предложено также автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя (см. фиг. 7), отличающееся тем, что в устройстве используется рычаг 38 второго рода (L=L1). Задают величину Zp=Zpop, где Zpop возможно наименьшая, но исключающая врезание лопаток величина радиального зазора 3 на взлетном режиме, и координата крепления стержня 6 к сегменту 1 Х1 (см. фиг. 8) определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на взлетном режиме и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, и заданных параметров: Zpop, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси 42 крепления опоры 40, закрепленной на опоре 36, навинченной на тягу 35, Х3 - координаты расположения оси 43 опоры 42 рычага 39, L2=Х2-Х3 плеча рычага между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на тягу 35, и из соотношения (8) при соответственной подстановке в него C'st, C'sk, C'r, определенных для крейсерского режима и режиме малого газа в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, определяются величина радиального зазора 3 на крейсерском режиме Zkr и величина радиального зазора 3 на режиме малого газа Zmg, и для известных координат X1, X2, Х3 определяется плечо рычага L1 между осью 43 опоры 42 рычага 39 и осью 43 опоры 40, закрепленной на опоре 36, навинченной на стержень 6, и при этом на малом газе отсутствует врезание рабочих лопаток, а на крейсерском режиме обеспечивается требуемые величины КПД ступени и удельного расхода топлива двигателем Ср.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (на фиг. не показано), отличающееся тем, что каждый рычаг дополнительно упруго подвешен на упругогистерезисном элементе, закрепленном на опоре или двух опорах, закрепленных на корпусе устройства, и контактирующим с натягом на всех режимах работы двигателя с рычагом (L=L2) на плече L4<L1 или с рычагом (L=L1) на плече L4<L2, создающим радиальное усилие, действующее на рычаг в направлении от продольной оси двигателя, по величине большее или достаточное для смещения у неработающего двигателя стержня с сегментом в этом направлении на величину зазора, образовавшегося от взаимного износа осей и пазов.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (на фиг. не показано), отличающееся тем, что упругогистерезисные элементы устройства выполнены либо в виде спиральной пружины сжатия, одним торцом без зазора одетой на штифт, запрессованный в опору, закрепленную на корпусе устройства, а другим торцом контактирует с рычагом с натягом

в случае использования рычага (L=L2), и с натягом

в случае использования рычага (L=L1), где  - максимальное значение функции C'rm - вычисленное для взлетного режима, либо упругогистерезисные элементы выполнены в виде упругого разрезного кольца, одетого без зазора на штифт, запрессованный в опору, закрепленную на корпусе устройства, и контактирующего с рычагом с натягом (9) в случае использования рычага (L=L2), или (10) в случае использования рычага (L=L1), либо в виде гофра, своими концами одетого с зазорами на штифты, запрессованные в опору, закрепленную на корпусе устройства, и контактирующего с рычагом в своем среднем поперечном сечении с таким же натягом - (9) или (10), и величина плеча L4 выбрана из условия обеспечения конструктивности рычага и конструктивности и прочности упругогистерезисного элемента.
- максимальное значение функции C'rm - вычисленное для взлетного режима, либо упругогистерезисные элементы выполнены в виде упругого разрезного кольца, одетого без зазора на штифт, запрессованный в опору, закрепленную на корпусе устройства, и контактирующего с рычагом с натягом (9) в случае использования рычага (L=L2), или (10) в случае использования рычага (L=L1), либо в виде гофра, своими концами одетого с зазорами на штифты, запрессованные в опору, закрепленную на корпусе устройства, и контактирующего с рычагом в своем среднем поперечном сечении с таким же натягом - (9) или (10), и величина плеча L4 выбрана из условия обеспечения конструктивности рычага и конструктивности и прочности упругогистерезисного элемента.
Предложено также автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 9 и 10), отличающееся тем, что каждый рычаг 39 упруго подвешен на двух симметрично расположенных с двух сторон рычага рессорах 60, выполненных каждая в виде многослойного пакета 61, набранного из стальных, каленых или нагартованных, шлифованных лент 62, изготовленных из нержавеющей стали, покрытых износостойким покрытием, либо сжатого равнораспределенной нагрузкой - давлением сжатого воздуха во втором контуре ТРДД, либо каждая рессора 60 собрана в следующей компоновке (см. фиг. 11): ее пакет 61 собран из лент одинаковой толщины, в центре его установлены две, три и более гладких лент 63, на них с двух сторон установлены пакеты 64, собранные «гофр в гофр» из двух и более гофрированных лент 65 таким образом, что вершины гофров одного пакета опираются на пакет 66 гладких лент 63 в тех же сечениях, что и вершины второго пакета 64. Шаг гофров гофрированных лент 65 выбран таким, что в пролете пакета 61 располагается только одна вершина, опирающаяся на пакет 66 гладких лент 63 в середине пролета, и под каждой опорой рессоры 60 располагается только одна вершина гофра. На пакеты 64 гофрированных лент установлены пакеты 67, собранные из одной, двух и более гладких лент 63. В собранной рессоре 60 (см. фиг. 9) гофры гофрированных лент полностью выпрямлены. Центральные 68 и концевые опоры 69 рессор 60 выполнены общими для обеих рессор (см. фиг. 10). Опоры рессор 60 (см. фиг. 12) выполнены разъемными и состоят из крышки 70 и основания 71, которыми служат полки опор-кронштейнов 72, скрепленных винтами 24 и контровочными шайбами 25, но у концевой опоры 69 (см. фиг. 13), закрепленной в средней части корпуса 46 крышки 70, выполнены отдельно для каждой рессоры 60. Пакет 61 (см. фиг. 14) каждой из рессор 60 в центральной опоре 68 и концевой опоре 69, закрепленной на корпусе 46 у его торца, закреплен неподвижно с помощью скрепляющего крышку 70 и основание 71 винта 24, расположенного сбоку пакета 61 без зазора в полукруглой выемке 73, выполненной в лентах 62, а в другой концевой опоре 69 (см. фиг. 15) двумя винтами 24, либо пакет 61 в концевых опорах 69 закреплен с возможностью смещения его концов вдоль его продольной оси в пределах прямого участка 74 (см. фиг. 16), выполненного в этом случае в центральной части полукруглой выемки 73. В центральную опору 68 (см. фиг. 9) запрессован упор 75 из бронзы БрС30. Рессоры 60 своими концевыми опорами 69 закреплены на опорах-кронштейнах 72, закрепленных с помощью винтов 24 и контровочных шайб 25 на корпусе 46 устройства. При этом за счет упругой деформации пакетов 61 создан натяг Н, определяемый из соотношения (9) или (10), прижимающий на плече L4 упор 75 из бронзы БрС30 своим сферическим концом, покрытым твердой смазкой, с требуемым усилием, направленным радиально от продольной оси двигателя, к рычагу 39.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 17), отличающееся тем, что опоры 27 стержней 6, закрепляемые на опорных площадках 23 корпусной секции 18, выполнены из легкого сплава - титанового, алюминиевого, или магниевого, и в них запрессованы стальные втулки 76 с расположенными в их канавках поршневыми уплотнительными кольцами 32.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 18), отличающееся тем, что устройство состоит из двух частей 77 - устройств управления радиальным зазором у ступени, объединенных в одно устройство управления радиальными зазорами у обеих ступеней деталями, общими для обоих устройств. Причем устройства управления радиальным зазором у ступени, без общих деталей, выполнены, либо по любому, но одному и тому же пункту формулы изобретения, либо по любым но разным пунктам формулы изобретения, а, как общие детали, выполнены: тяги 35, навинченные на них опоры 36, установленные под ними дистанционные 37 и контровочные упругие разрезные шайбы 9, закрепленные на этих опорах двумя винтами 24 и контровочными шайбами 25 опоры 40 с ушками 41. Причем тяги 35 закреплены на общей для обеих ступеней корпусной секции 18, и к опорам 40, закрепленным на опорах 36, навинченных на тяги 35, шарнирно прикреплены рычаги 39 механизмов позиционирования 7 каждого из устройств 77 управления радиальным зазором у ступени. Общими для обеих ступеней выполнены также: корпус 46 устройства, тепловой компенсатор 53 и три цилиндрических направляющих стержня 56, равнорасположенных по окружности, закрепленных параллельно тягам 35 в опорах 40, закрепленных на опорах 36, навинченных на тяги 35, и проходящих через отверстия в корпусе 46 с возможно меньшим зазором, но таким, который исключает заклинивание этих стержней в отверстиях на всех режимах работы двигателя, и корпусная секция 18, каждая часть которой выполнена соответственно тому пункту формулы изобретения, которому соответствует устройство 77 управления радиальным зазором у ступени, которую охватывает эта часть корпусной секции, и кольцевое пространство 17 под корпусной секцией 18 разделено между ступенями кольцевым вертикальным фланцем 20, закрепленным на ней радиально расположенными штифтами 21, запрессованными во фланец 20 и корпусную секцию 18 и зафиксированными от выпадания завальцовкой, и у ТРДД обтекатели 58, охватывающие тепловой компенсатор 53, механизмы позиционирования 7, опоры 40 стержней и сами стержни 6 и опоры 36, закрепленные на них, устройств 77 управления радиальными зазорами обеих ступеней, и тяги 35 с закрепленными на них опорами 36 и 40.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 19), отличающееся тем, что сегмент 1 устройства выполнен в виде сегмента 11 НА, расположенного перед рабочим колесом 10 последней ступени КВД, содержащего часть 13, охватывающую рабочие лопатки 2 колеса последней ступени КВД с радиальным зазором 3 и часть 14, охватывающую с радиальным зазором 15 зубцы лабиринтного уплотнения 16 сектора ротора перед рабочим колесом последней ступени КВД. Корпусная секция 18 последней ступени КВД разделена на три кольцевых пространства, в которых размещены: НА, расположенный перед рабочим колесом, части 13 сегментов, охватывающие рабочие лопатки 2 колеса 10 последней ступени КВД, и закреплен НА, расположенный за рабочим колесом, тремя вертикальными кольцевыми фланцами, из которых два фланца 19 закреплены в тех же фланцевых стыках, что и корпусная секция 18, а один, фланец 20, к которому крепится этот НА, закреплен с помощью радиально расположенных штифтов 21, запрессованных во фланец 20 и корпусную секцию 18 и зафиксированных от выпадания либо приливами 33, выполненными на опорах 27 стержней 6, закрепленных на корпусной секции 18, либо завальцовкой.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 20), отличающееся тем, что сегменты 1 выполнены с шириной, измеренной вдоль продольной оси двигателя, охватывающей с заданным радиальным зазором 3 только лопатки 2 рабочего колеса 10 ступени. На внутренней поверхности стенки швеллера каждого сегмента 1, на его концах и в месте расположения бобышки 8 (см. фиг. 20 и 21), в которой крепится стержень 6, выполнены опорные площадки 78, свободные опорные поверхности которых являются частями цилиндрической поверхности, концентричной продольной оси двигателя. Сегменты 1 (см. фиг. 20) с возможно меньшими зазорами по их полкам расположены в кольцевом пространстве 17, образованном корпусной секцией 18 и двумя кольцевыми фланцами 20, закрепленными на корпусной секции 18 радиально расположенными штифтами 21, запрессованными во фланцы 20 и корпусную секцию 18 и зафиксированными от выпадания приливами 33, выполненными у опор 27 стержней 6, закрепленных на корпусной секции 18. Сегменты 1 одеты на разрезное упругое уплотнительное кольцо 79 с нулевым зазором по фигурным фланцам 80, выполненным по его бокам, таким образом, что бобышка 8 (см. фиг. 21) каждого сегмента 1 с зазором проходит через отверстие 81 в кольце 79. Причем диаметр отверстия 81, через которое проходит бобышка 8 стержня 6, расположенного противоположно разрезу кольца 79 таков, что величина зазора между этой бобышкой и отверстием составляет 0,1÷0,2 мм, а другие отверстия 81 выполнены в виде пазов с большим размером, направленным в окружном направлении. Причем этот размер паза тем больше, чем паз ближе к разрезу кольца 79 и эти размеры пазов 81 выполнены такими, что допускают максимальное потребное увеличение диаметра кольца 22 (см. фиг. 22), составленного из сегментов 1, и диаметра разрезного уплотнительного кольца 79. Фигурные фланцы 80 упругого уплотнительного кольца 79 имеют форму выступов 82 с шириной, равной хорде опорных площадок 78, расположенных на концах соседних сегментов 1, перекрывающих стыки сегментов, с наружным диаметром, равным наружному диаметру полок сегментов 1, соединенных отбортовками 83. На выступах 82 и полках сегментов 1 симметрично стыку полок соседних сегментов выполнены плоские опорные площадки 84. Причем кромки 85 этих опорных площадок (см. фиг. 23) оставлены острыми, На фигурных фланцах 80 (см. фиг. 20 и 23) герметично закреплены упругие уплотнительные элементы 86, изготовленные из нержавеющей, закаленной, шлифованной ленты из жаропрочной стали или сплава, без зазоров одной полкой 87 опирающиеся на плоские опорные площадки 84, а другой полкой 88 прижатые к кольцевому фланцу 20, с которым контактируют полки сегментов 1, на которые опираются эти упругие элементы. Кромка 89 (см. фиг. 23), по которой пересекаются опорные поверхности полок 87 и 88 каждого упругого элемента 86 также выполнена острой, В собранном устройстве упругое уплотнительное разрезное кольцо 79 с натягом прижато к опорным площадкам 78 сегментов 1, и упругими элементами 86 к плоским опорным площадкам 84 и кольцевым фланцам 20, а на всех режимах работы двигателя уплотнительное кольцо 79 и упругие элементы 86 дополнительно прижаты к опорным площадкам еще и давлением вторичного воздуха, который поступает из камеры сгорания в кольцевую полость 90 (см. фиг. 20) над наружным кольцом СА, расположенным перед рабочим колесом 10 ступени, и через равнорасположенные отверстия 91 в кольцевом фланце 20, закрепленном на корпусной секции 18 штифтами 21, в кольцевую полость 17 над сегментами 1 и упругим уплотнительным разрезным кольцом 79, и из этой полости через равнорасположенные отверстия 92 в другом кольцевом фланце 20 в кольцевую полость 93 над наружным кольцом СА, расположенным за рабочим колесом 10 ступени. Диаметры отверстий 91 и 92 и их количество подобраны так, что приближенно выполняется одинаковость эпюр давления вторичного воздуха в кольцевой полости 17 и давления на сегменты 1 в газовом тракте ступени. Площади опорных площадок 76 сегментов 1 и плоских опорных площадок 84 выбраны таким образом, чтобы на взлетном режиме усилия, действующие на тяги 35, были меньше допустимого, и разрез в упругом уплотнительном кольце 79 выполнен в его поперечном сечение с отбортовками 83, и один из сегментов 1 (см. фиг. 22) ступени выполняется с торцами 5, срезанными параллельно продольной оси стержня 6, закрепленного на этом сегменте, а ответные торцы 5 двух сегментов 1, соседних с этим сегментом, срезаны так же, как у этого сегмента.
Предложено также автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, отличающееся тем, что в упругом разрезном уплотнительном кольце 79 выполнено два ряда пазов 94 с большим размером, направленным в окружном направлении (см. фиг. 24), расположенных над зазорами 4 между торцами 5 соседних сегментов 1. Один ряд пазов 94 расположен в области более высокого давления воздуха в газовом тракте ступени, а другой ряд - в области более низкого давления воздуха. Зазоры 4 по торцам 5 сегментов 1 выполнены минимально допустимой величины, и такими, что на взлетном режиме двигателя величина зазора 4 была 0,1÷0,2 мм. На торце 5 одного из соседних сегментов 1 выполнены две выемки 95, расположенные под пазами 94. Причем больший размер паза 94 тем больше, чем паз ближе к разрезу кольца 79 и эти размеры пазов 94 выполнены такими, что на всех режимах работы двигателя открыта площадь выемок 95, обеспечивающая высокую эффективность предложенного устройства, и в любой момент времени работы двигателя величина неуравновешенной нагрузки, действующей на сегменты со стороны газового тракта ступени не превышает допустимую величину.
Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (см. фиг. 25), отличающееся тем, что опорными площадками для упругого разрезного уплотнительного кольца 79 служат все внутренние поверхности стенок сегментов 1, за исключением бобышек 8, в которых крепятся стержни 6.
Предложено также автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя (фиг. 25), отличающееся тем, что корпус 46 устройства непосредственно закреплен на гондоле 96 и стержни, направляющие тяги и фиксирующие корпус, не ставятся, и длина пазов 44, выполненных в рычагах 39, допускает свободное проскальзывание вдоль них осей 43, закрепленных в опорах 40, закрепленных на опорах 36, навинченных на стержни 6 и тяги 35, не только при повороте рычагов 39, но и смещении стержней 6 и тяг 35 в направлении продольной оси двигателя, вызванное тепловым удлинением статора двигателя, и для крейсерского режима величины плеча L1 и отношения L1/L2 определены так, что величина радиального зазора на этом режиме равна Zop и при этом получены хорошие значения радиальных зазоров 3 при приемистости на взлетном режиме при уходе самолета на второй круг Zp, малом газе Zmg, и останове двигателя, обеспечивающие достаточно высокую эффективность предлагаемого устройства и на этих режимах работы двигателя.
Сборка предлагаемых устройств ясна из описания их конструкции и фигур и в основном описана выше. Поэтому опишем только особенности сборки отдельных предлагаемых устройств.
Обечайка ТРДД для обеспечения сборки предлагаемых устройств (на фиг. не показано) должна иметь разъем в поперечном сечении двигателя, расположенном в месте наибольшей ширины поперечного сечения обтекателя, и иметь вырезы, по форме совпадающие с формой этого сечения.
У предложенных устройств термомеханического управления радиальными зазорами устройство полностью собирается отдельно и затем устанавливается на собранную часть двигателя и закрепляется на ней во фланцевом стыке корпусной секции 18 с помощью болтов 50 (см., например, фиг. 2) и самоконтрящихся гаек 51. Затем к другому фланцу корпусной секции 18 крепятся другие части корпусов двигателя.
После закрепления каждого рычага 39 его опорой 45 на корпусе 46 и опорой 40 на опоре 36, навинченной на каждый стержень 6, установки и закреплении рессор 60 проверяют у каждого рычага 39 усилие, смещающее рычаг в радиальном направлении к продольной оси двигателя на требуемое максимальное расстояние. Это усилие не должно превышать допустимой величины. Затем закрепляют вторую опору 40 шарнирно закрепленную на рычаге 39 с опорой 36, навинченной на тягу 35. Последними на собранное устройство устанавливают обтекатели 56, сводят их концы 97 (см. фиг. 4) вплотную друг с другом и закрепляют обтекатели 58 в этом положении на корпусе 46, или на корпусе и опорных площадках 23 корпусной секции 18 (на фиг. не показано). Концы 97 могут быть оставлены свободными, или их стык может быть проварен сплошным или прерывистым швом, если обтекатели 58 изготовлены из листа из алюминиевого или титанового сплава, или концы 97 могут быть склеены, если обтекатели 58 изготовлены из композитного материала.
У предложенных устройств термомеханического управления радиальными зазорами сборку сегментов в кольцо в корпусной секции 18 и скрепление их со стержнями 6 можно выполнять двумя способами. Можно половину сегментов 1 предварительно скрепить со стержнями 6 и установить их на корпусной секции 18 с шагом через сегмент. В пустые места между этими сегментами вставить другие сегменты 1, смещая эти сегменты в направлении продольной оси двигателя так, чтобы все сегменты 1 составили кольцо с радиально расположенными, заданными зазорами 4 между их торцами 5. Затем скрепить с остальными сегментами стержни 6. И можно сначала в корпусной секции 18 собрать все сегменты 1 в кольцо с радиально расположенными, заданными зазорами 4 между их торцами 5 и затем все их скрепить со стержнями 6.
У предложенных устройств термомеханического управления радиальными зазорами с рычагами 39, дополнительно подвешенными на рессорах 60, (см. фиг. 9) отдельно собирают сборочную единицу, состоящую из корпуса 46 устройства, закрепленных на нем: тепловых компенсаторов 53, рычагов 39 с закрепленными на них шарнирно опорами 40 и 42 и рессор 60, своими концевыми опорами 69, закрепленных на корпусе 46, и упорами 75, запрессованными в их центральные опоры и с натягом упирающиеся в рычаги 39. Собранную сборочную единицу опорами 40 устанавливают на опоры 36, навинченные на стержни 6 и тяги 35, и закрепляют на них. В опорах 36, навинченных на тяги 35, закрепляют стержни 56. Корпусную секцию 18 вместе с тепловыми компенсаторами 53 закрепляют на собранной части двигателя.
У предложенных устройств термомеханического управления радиальными зазорами с упругим разрезным уплотнительным кольцом 79 (см. фиг. 20, 24, 25) установку сегментов 1 в корпусную секцию 18 и скрепление их со стержнями 6 можно выполнить, собрав их в кольцо с радиально расположенными, заданными зазорами 4 между их торцами 5 (см., например, фиг. 22), последовательно одевая их на упругое разрезное уплотнительное кольцо 79, установленное в секции 18, и смещая их в радиальных направлениях. Причем последним собирается сегмент 1, у которого торцы срезаны параллельно продольной оси стержня 6, закрепляемом на этом сегменте. Затем со всеми сегментами 1 скрепляют стержни 6.
Работа рычага второго рода широко известна и не нуждается в описании. Работа предлагаемых устройств высокоэффективна, так как ее результатом является повышение КПД ступени и двигателя, снижение удельного расхода топлива Ср, увеличение тяги двигателя на всех режимах его работы и исключение врезания рабочих лопаток на малом газе при останове двигателя и провала тяги на взлетном режимах, как при взлете самолета, так и приемистости при уходе самолета на второй круг и этот результат получается засчет энергии непроизводительных «паразитных» процессов, всегда сопровождающих рабочие производительные процессы в двигателе. Рычаги смещают сегменты в требуемые положения при воздействии на них через передаточные звенья упругих деформаций корпусных деталей двигателя, неизбежно возникающих при нагреве этих деталей и воздействии на них статических и динамических нагрузок.
Колебания предлагаемых устройств («дребезг») эффективно гасится в основном засчет работы сил сухого трения на взаимных упругих проскальзываниях лент рессор при циклической деформации рессор в процессе колебаний.
Основные преимущества предлагаемых устройств описаны выше. К ним, прежде всего, следует отнести значительно более простую конструкцию предлагаемых термомеханических устройств по сравнению со всеми известными запатентованными конструкциями тепловых и механических устройств управления радиальными зазорами, в которой отсутствуют специальные силовые приводы, датчики, прибор для считывания показаний датчиков, электрические связи и нужда в работе с бортовым компьютером, связующее кольцо и передаточные звенья, связывающие его с силовыми приводами и механизмами позиционирования. Предлагаемые термомеханические устройства для управления радиальным зазором между концами рабочих лопаток ротора и статором устанавливают оптимальную величину этого зазора на крейсерском режиме, на котором в течение своего ресурса двигатель работает наибольшее время, т.е. наибольшее время втечение ресурса двигатель работает с возможно лучшими эксплуатационными характеристиками. Кроме того, предлагаемые термомеханические устройства для управления радиальным зазором расчетны. Если при использовании этих устройств на каком - то переходном режиме возникает опасность появления аварийной ситуации, например, из-за чрезмерного уменьшения радиального зазора, и врезания рабочих лопаток, расчетом можно попытаться определить такие параметры устройств, которые бы при приемлемом ухудшении эксплуатационных характеристик двигателя на крейсерском режиме исключили бы возможность появления аварийной ситуации на всех других режимах работы двигателя. Если это не удается, следует применить механическое устройство по заявке №2017137183.
Расчет параметров предлагаемых устройств дает приближенные результаты, точность которых в некоторых случаях может оказаться недостаточной. В этих случаях требуемые параметры предлагаемых устройств окончательно определяются при стендовых испытаниях двигателя в составе с устройством.
При применении предлагаемых устройств у ступени ТВД отпадает необходимость использования сотового уплотнения радиального зазора по концам рабочих лопаток, что упрощает конструкцию ТВД.
По нашему мнению, проблема поддержания минимально допустимой величины радиальных зазоров в турбокомпрессорах ГТД на всех режимах работы двигателя по важности вполне сравнима с проблемой управления газодинамическими характеристиками НА в процессе полетного цикла, а конструкции предложенных нами устройств значительно проще, и габариты и масса их значительно меньше, чем у устройства для управления НА, и это свидетельствует в пользу предположения, что уже в ближайшем будущем эти устройства могут появиться на двигателях.
И в заключение, вслед за многими авторами изобретений этих устройств, предположим, что настоящее изобретение окажется полезным для специалистов, или послужит основой для различных его улучшений, или будут использованы с пользой только отдельные идеи этого предложения.
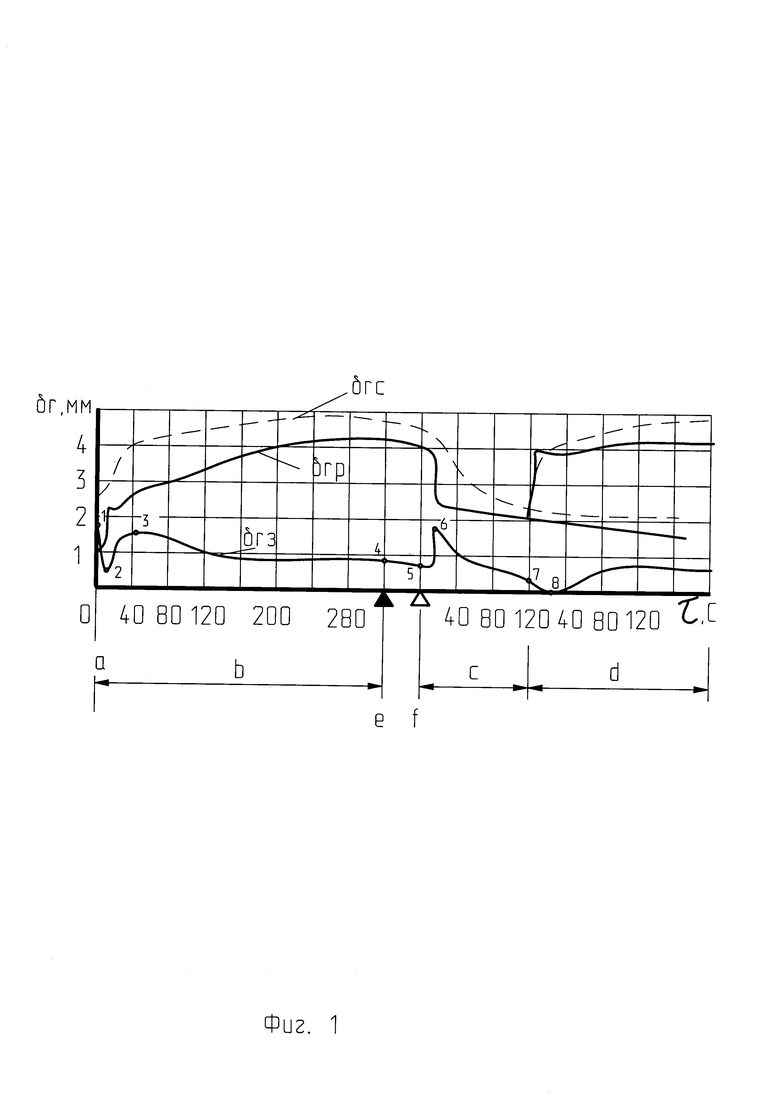
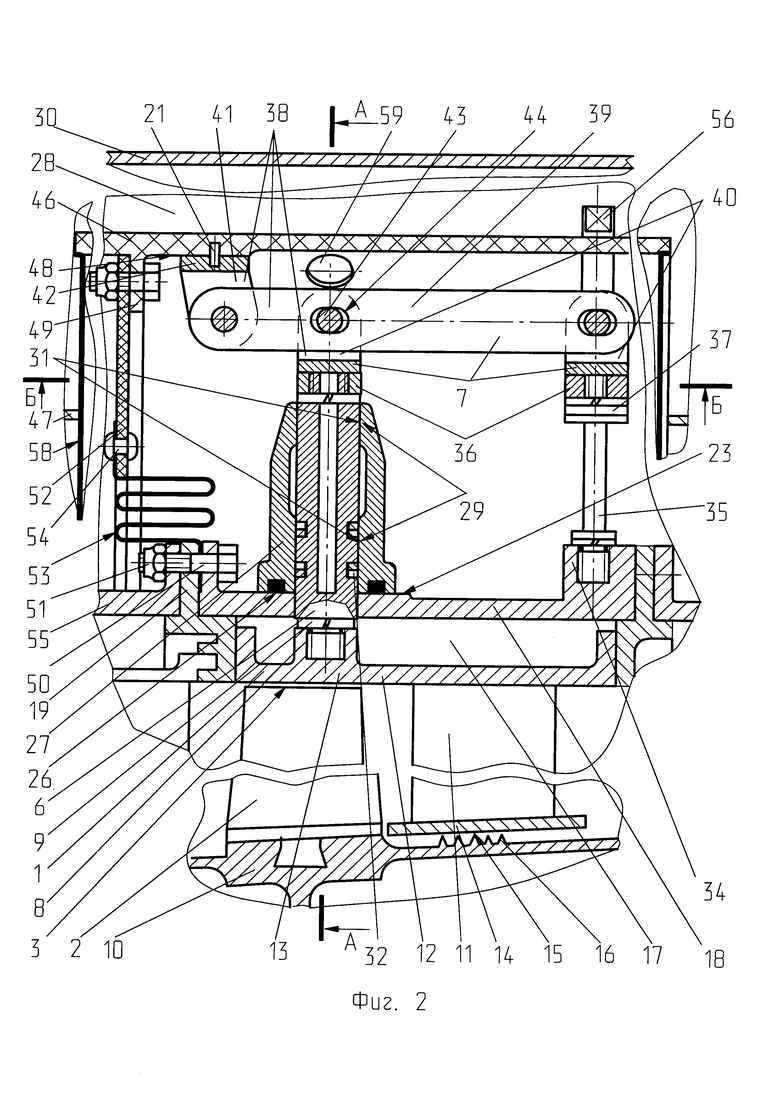
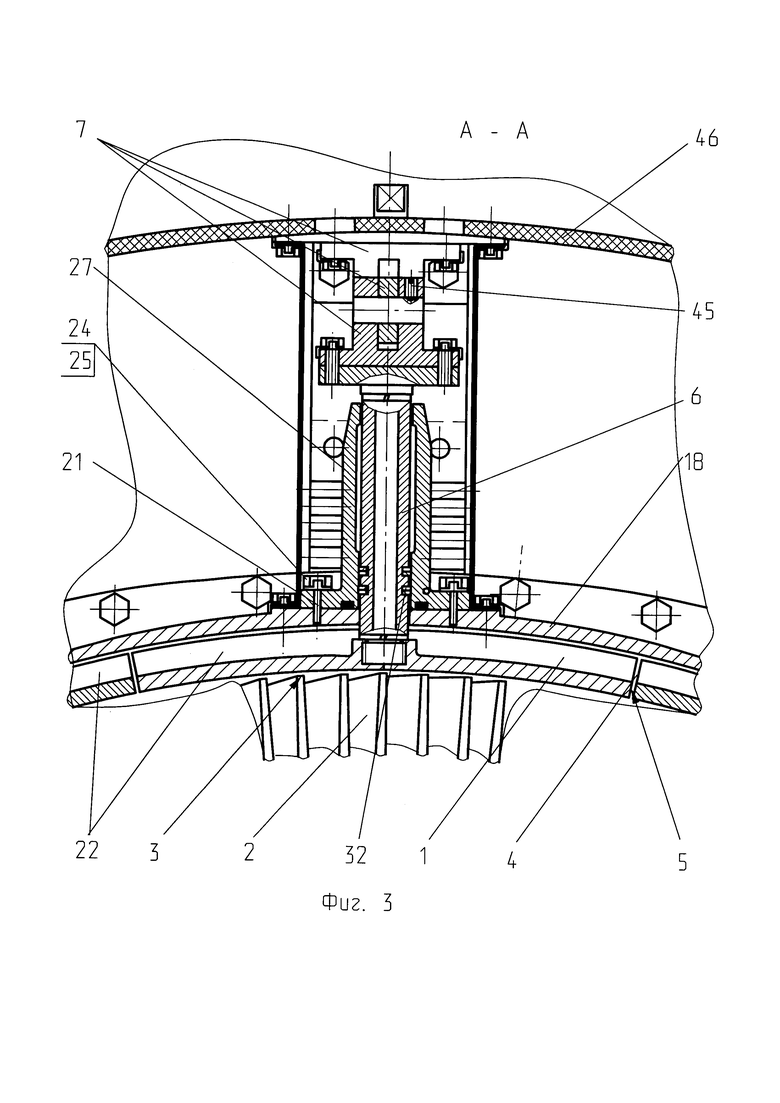
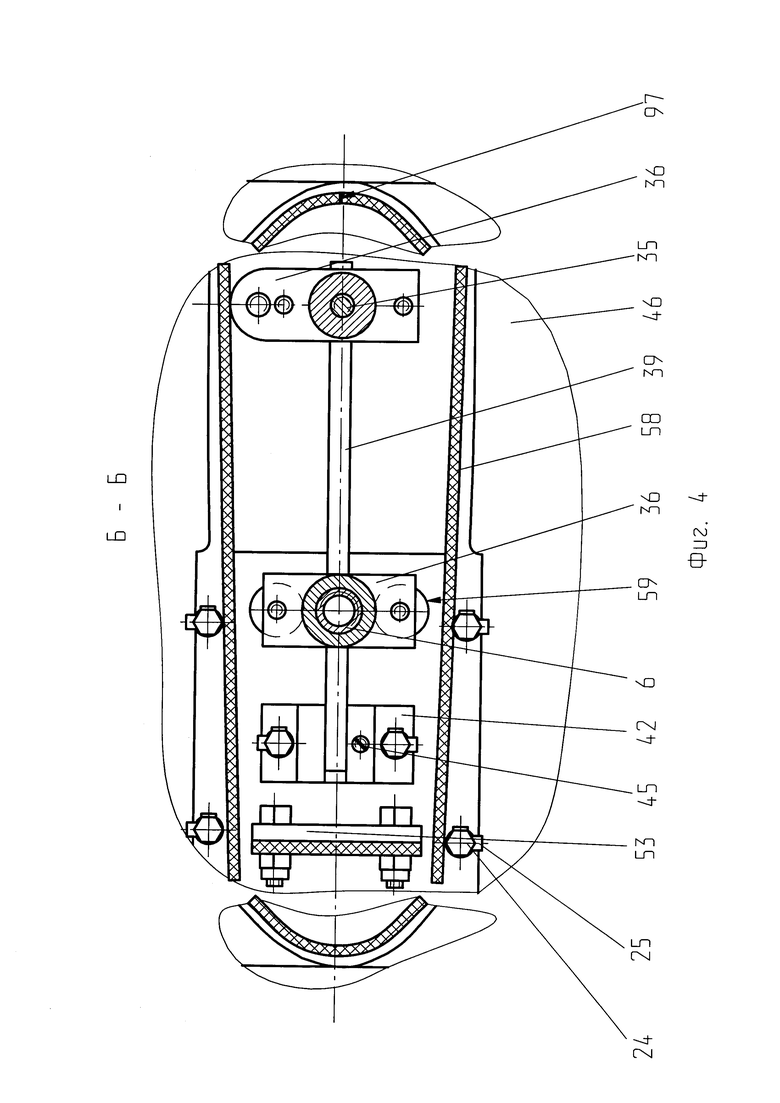
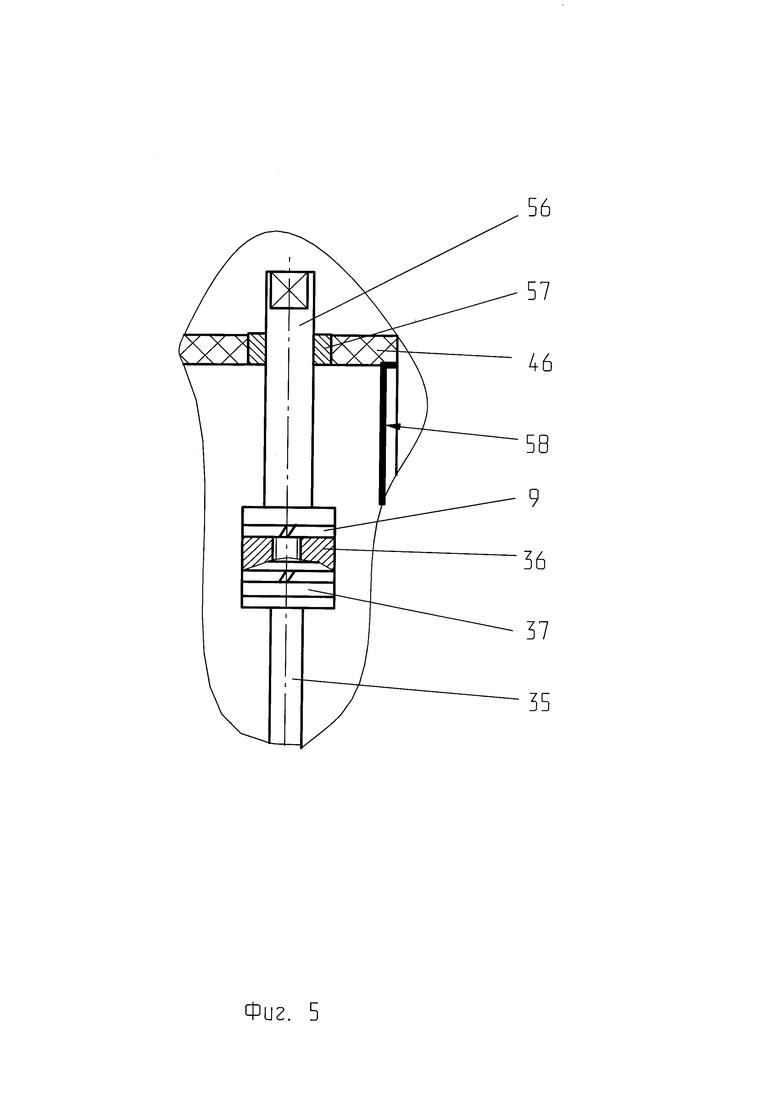
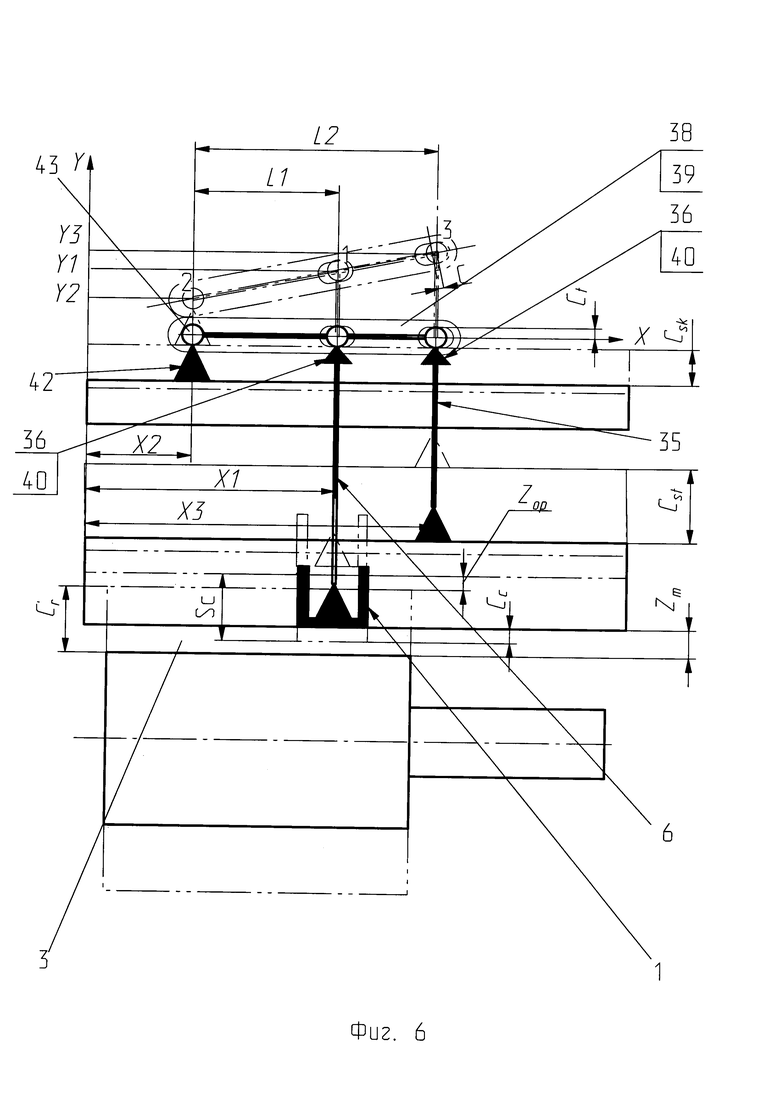
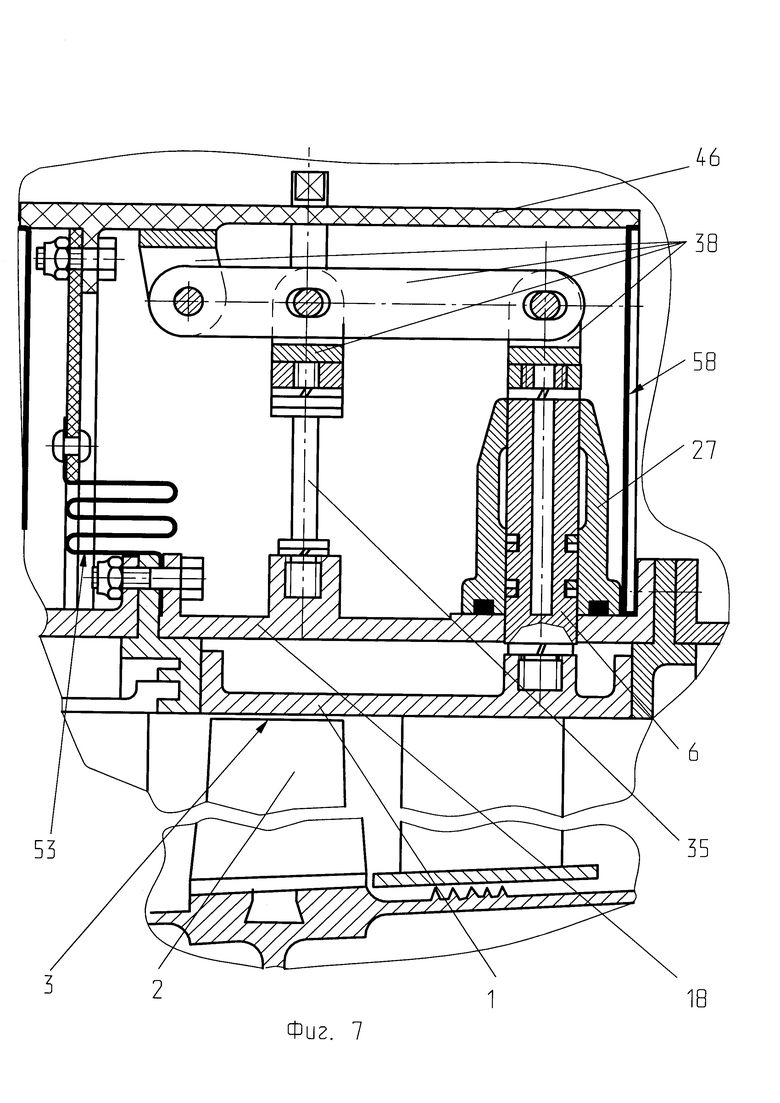
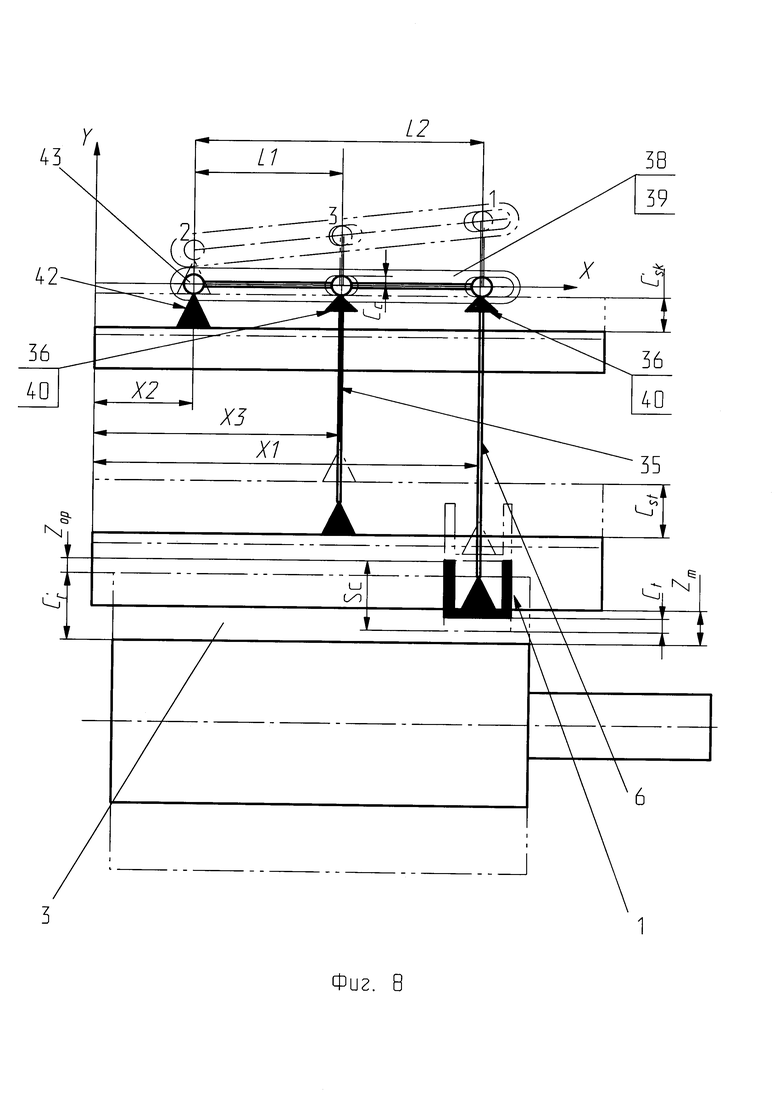
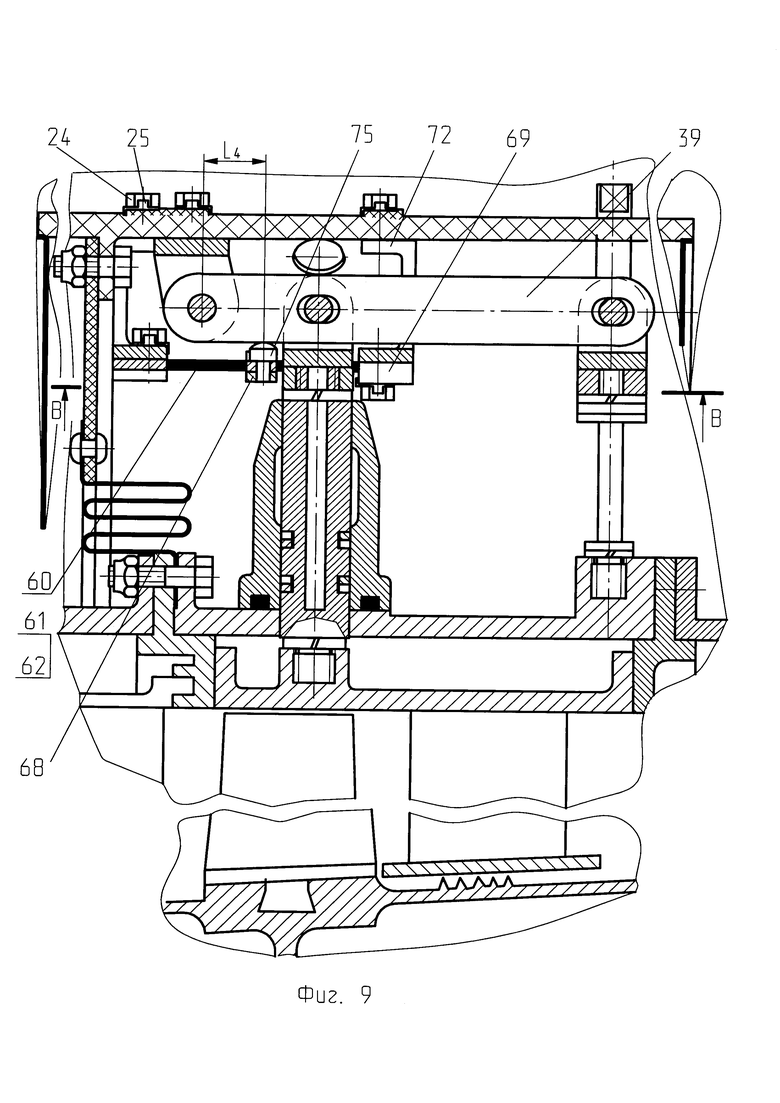
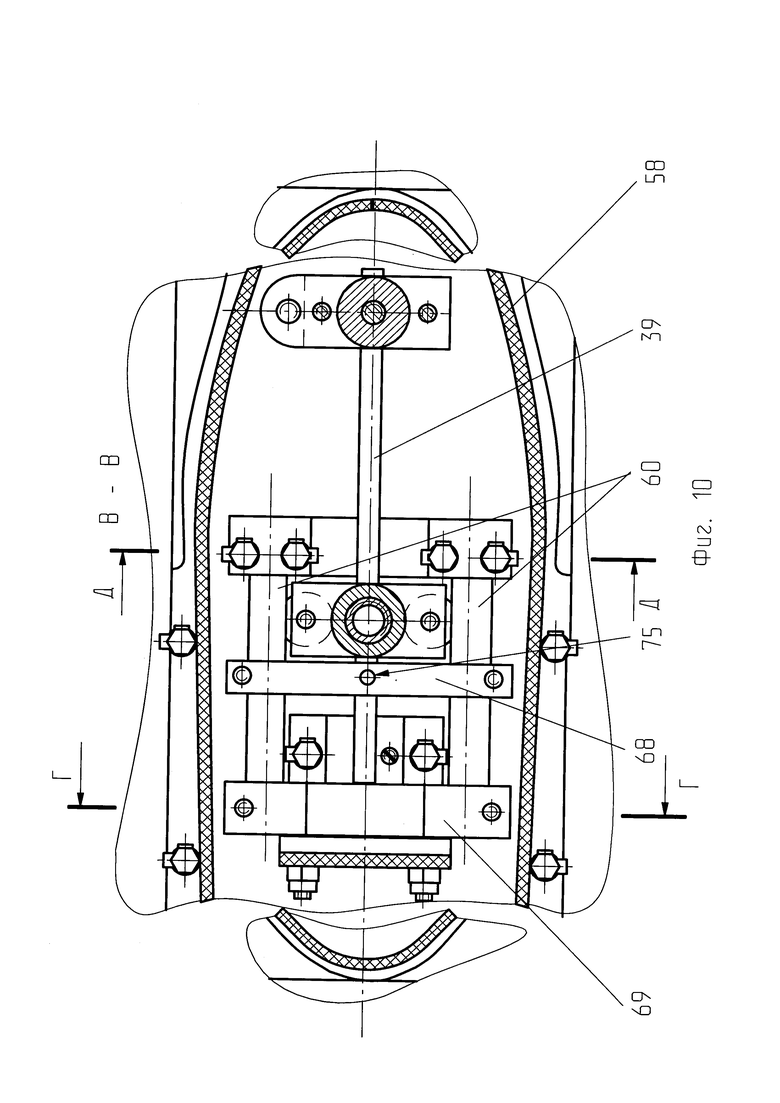
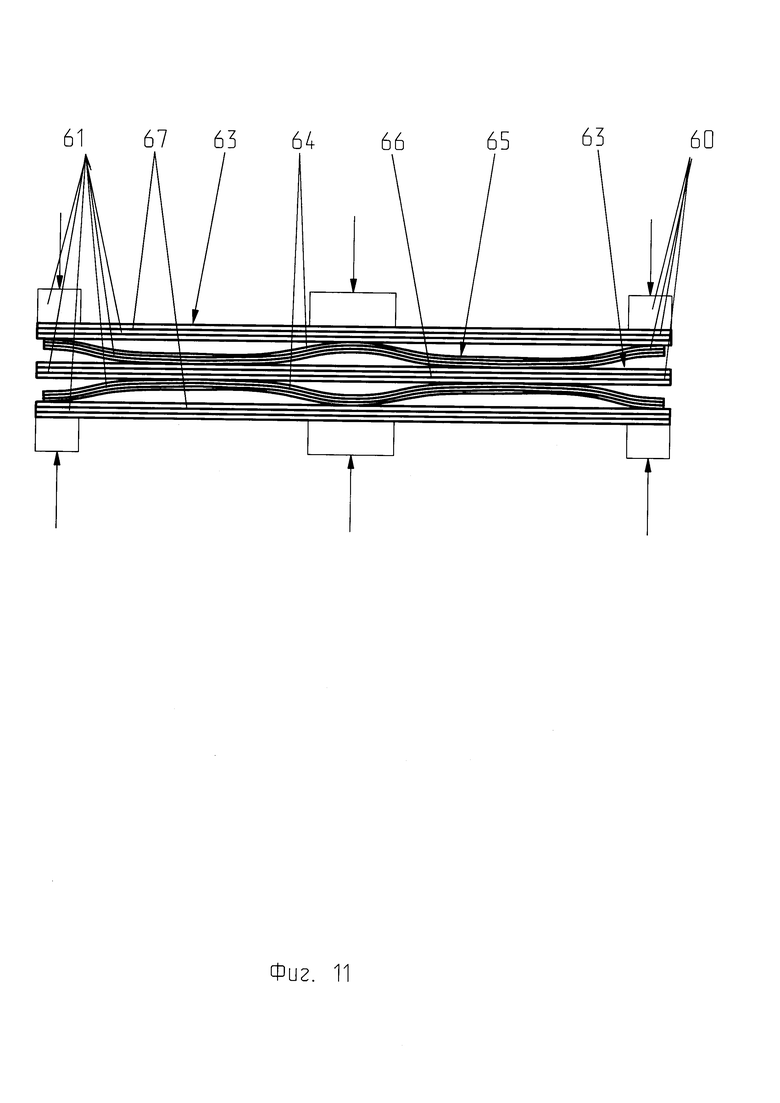
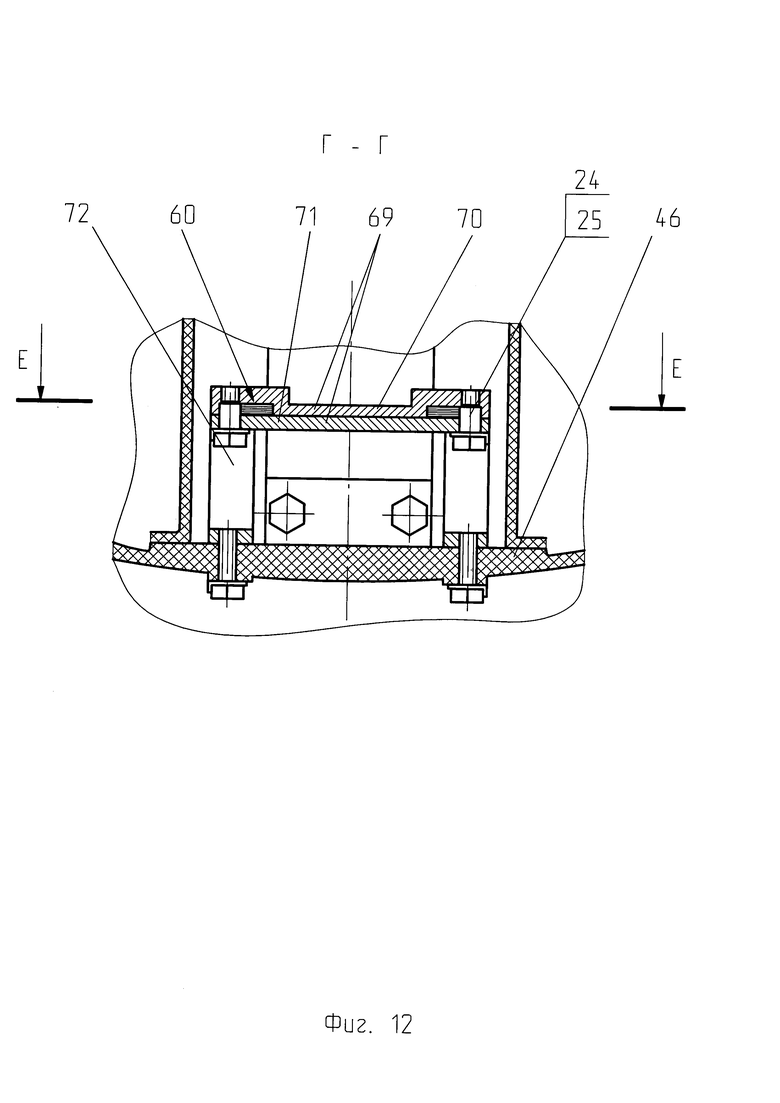
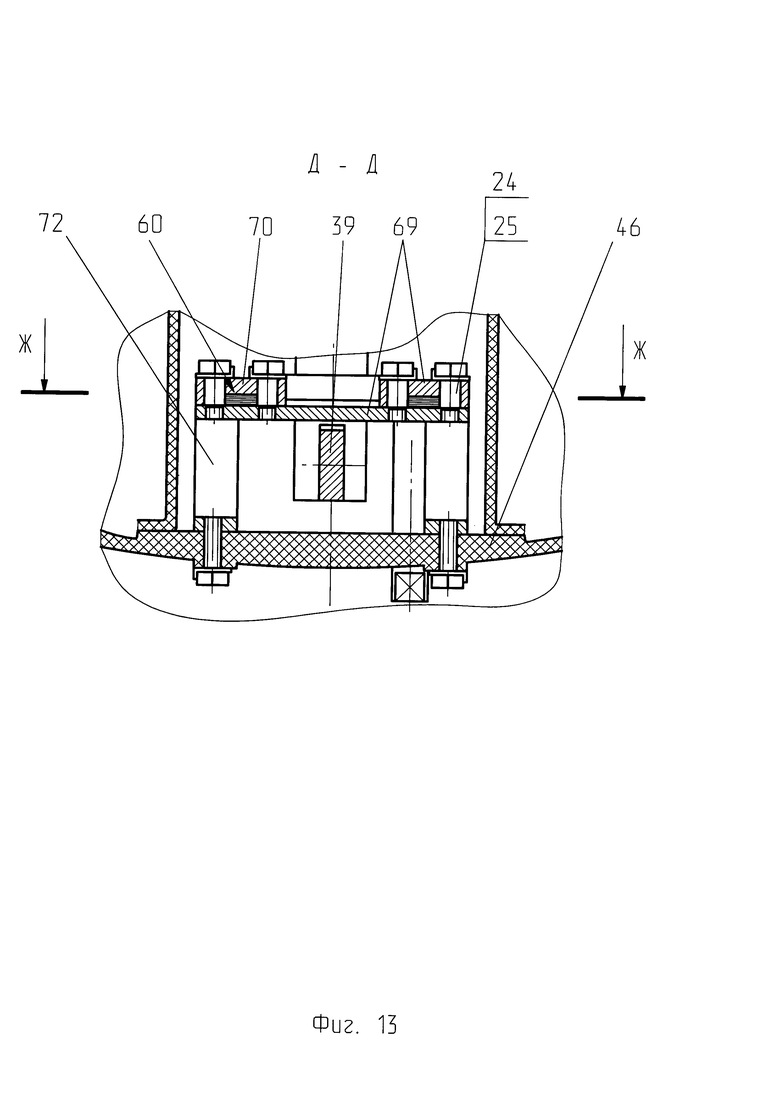
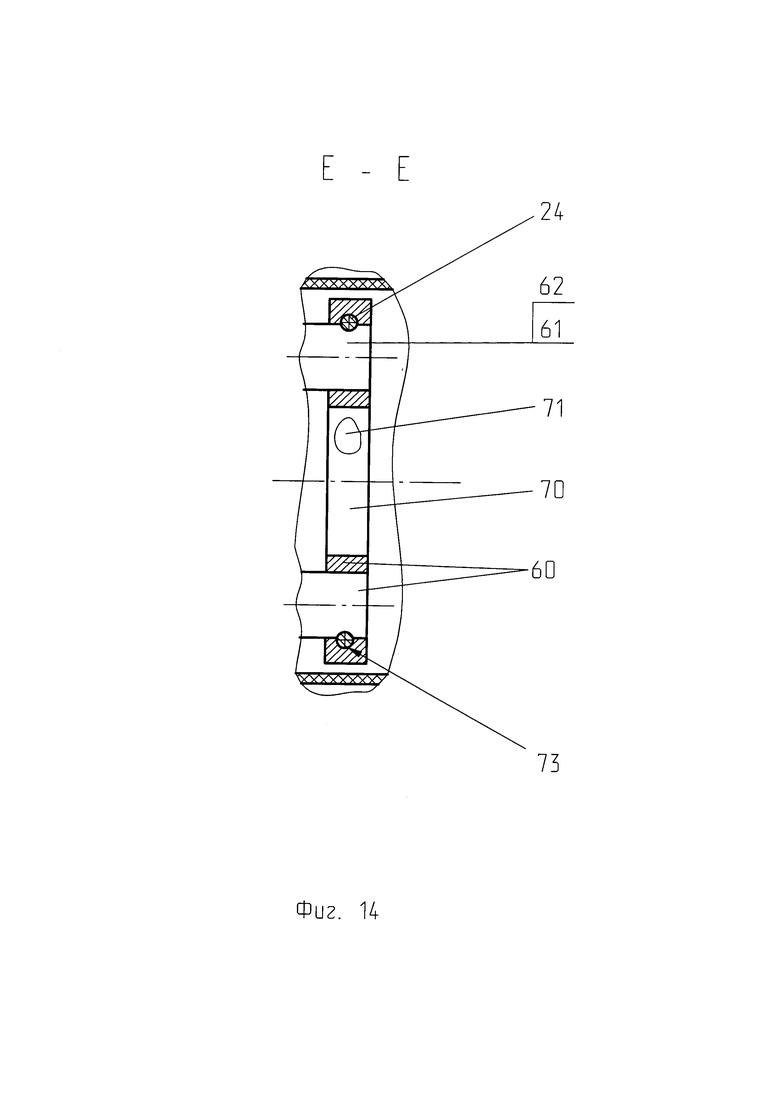
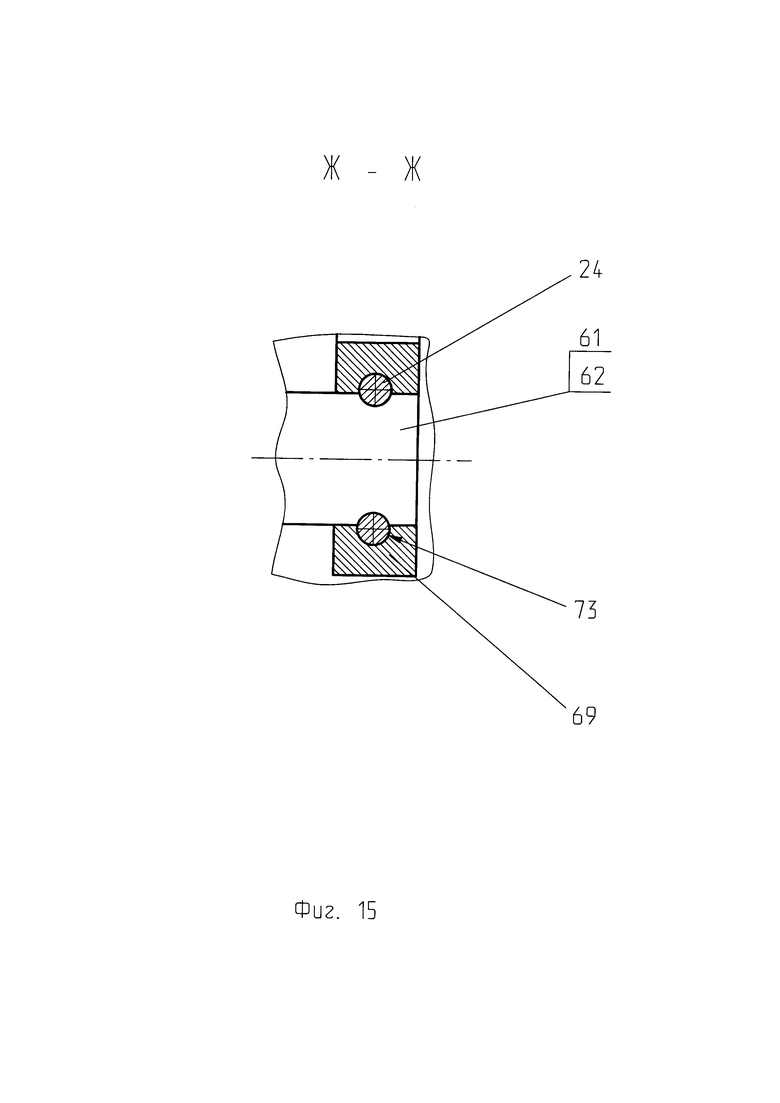
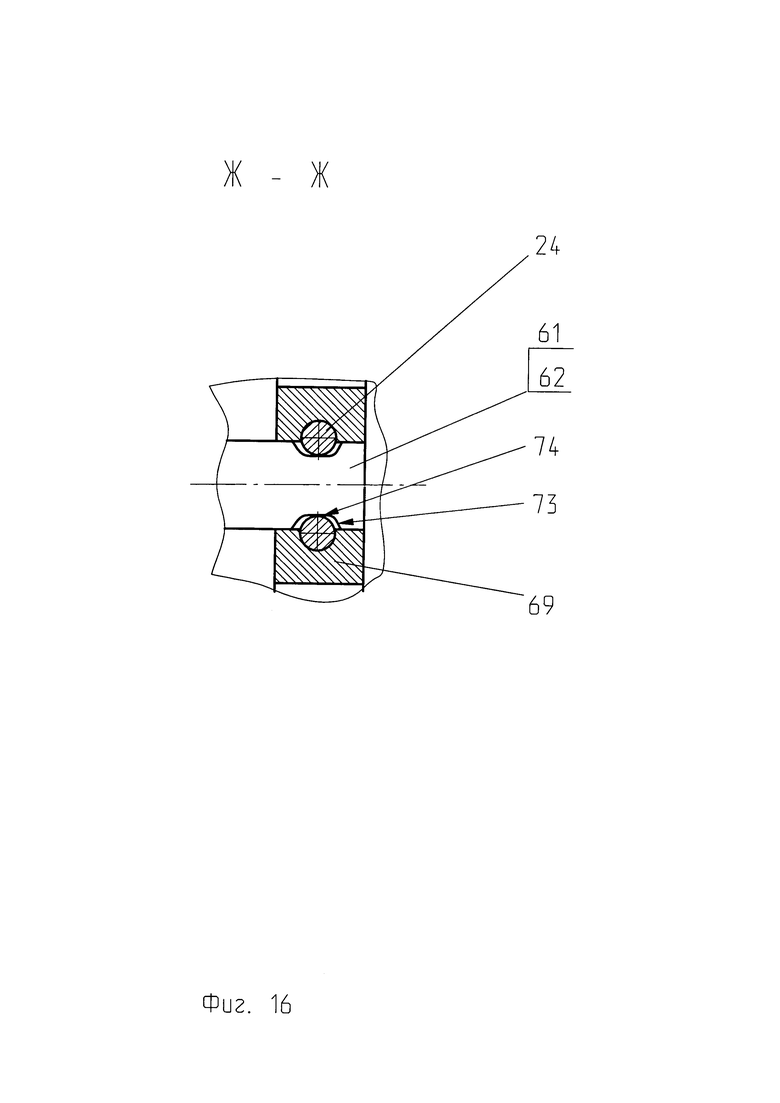
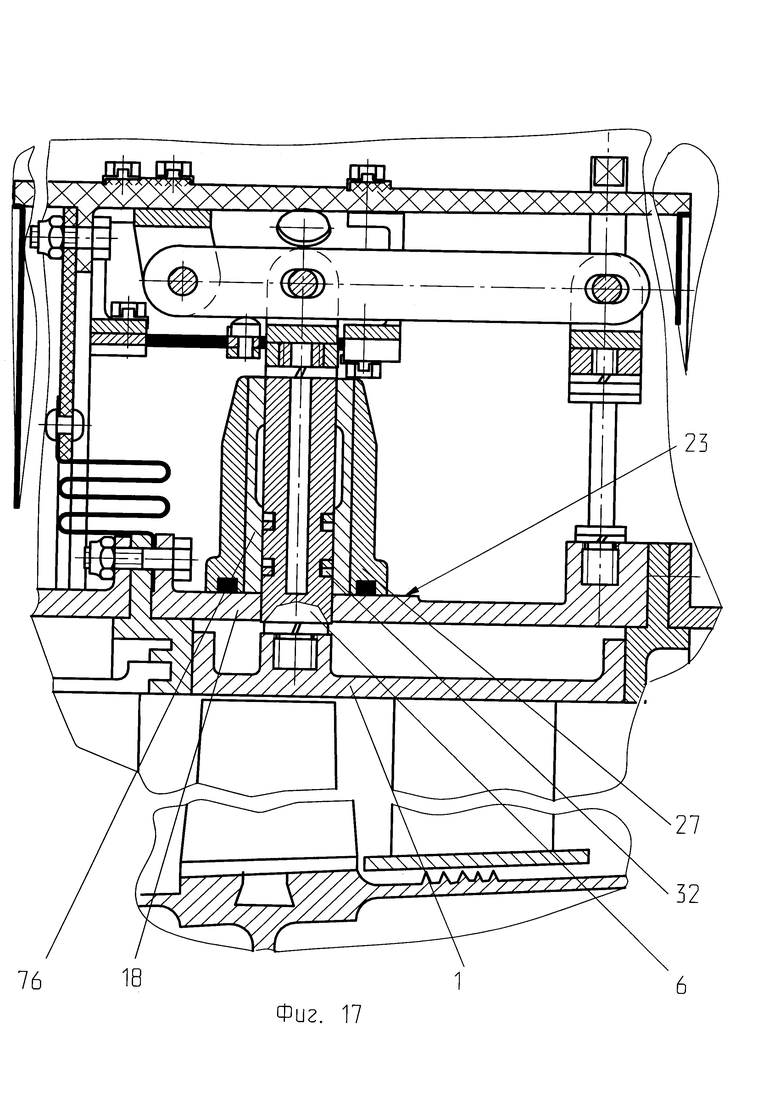
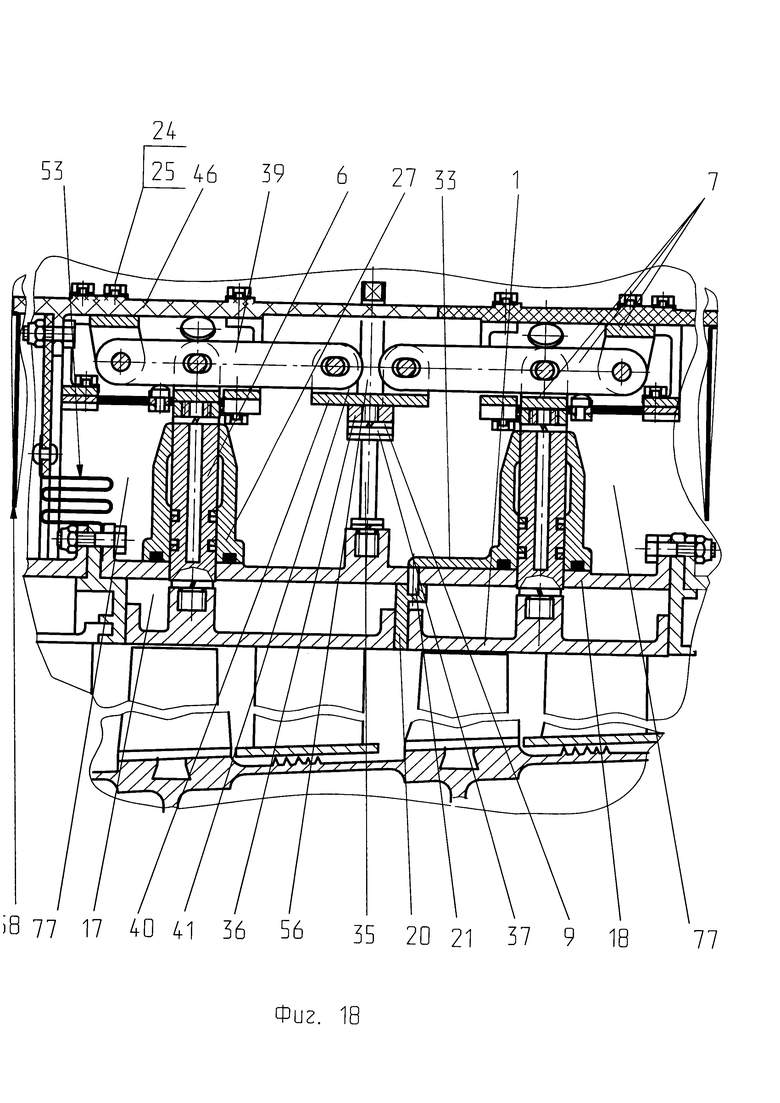
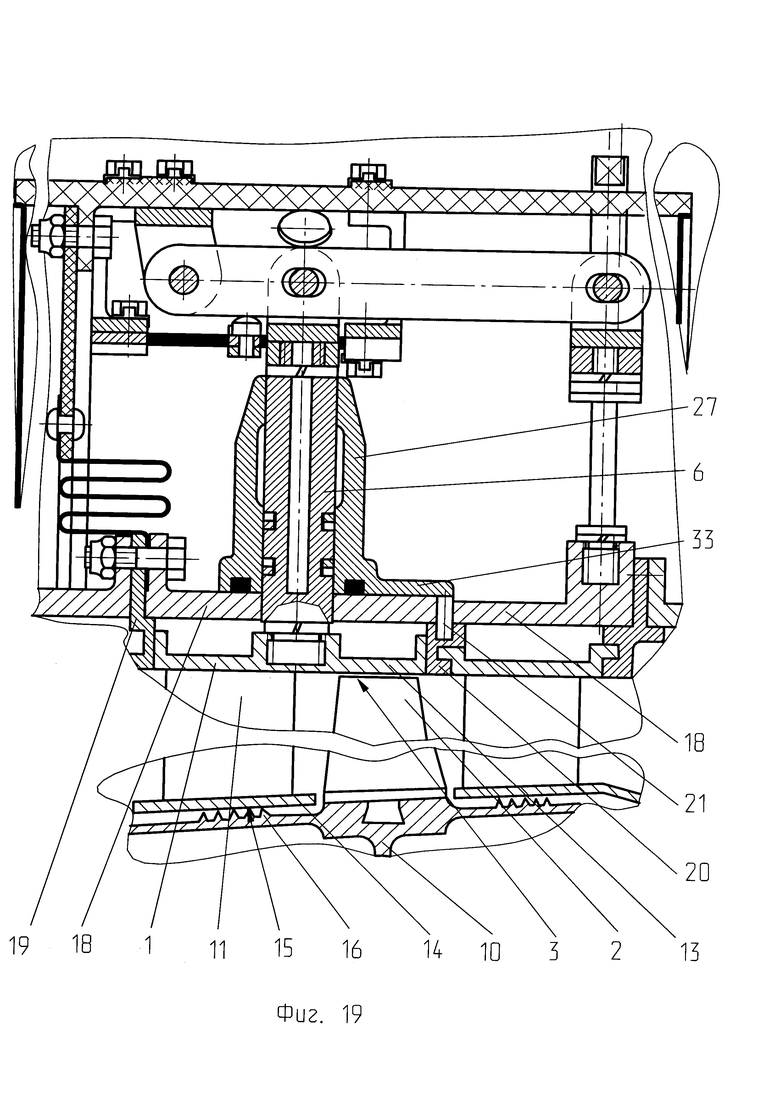
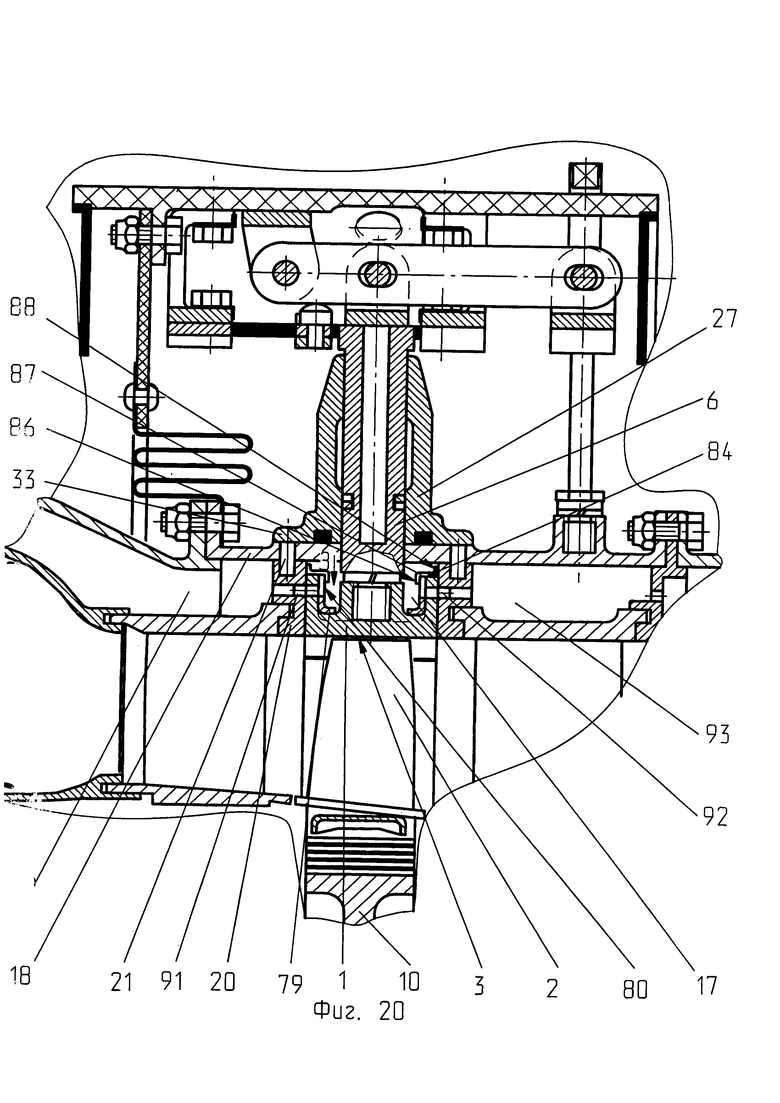
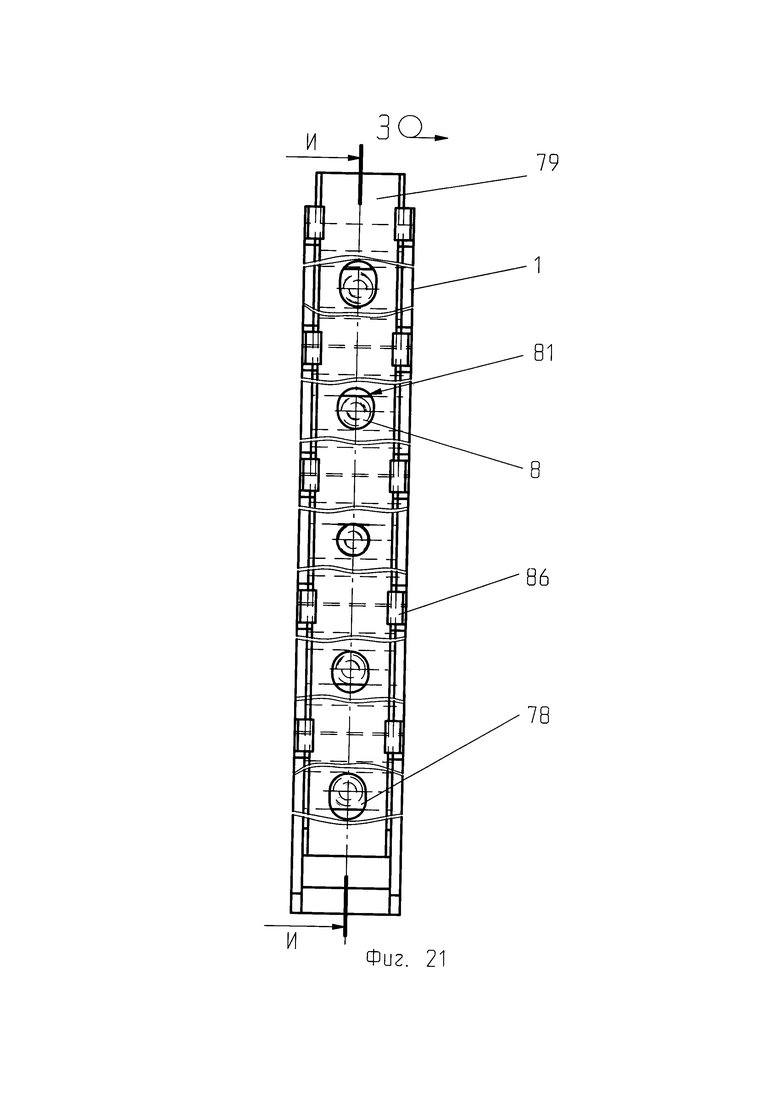
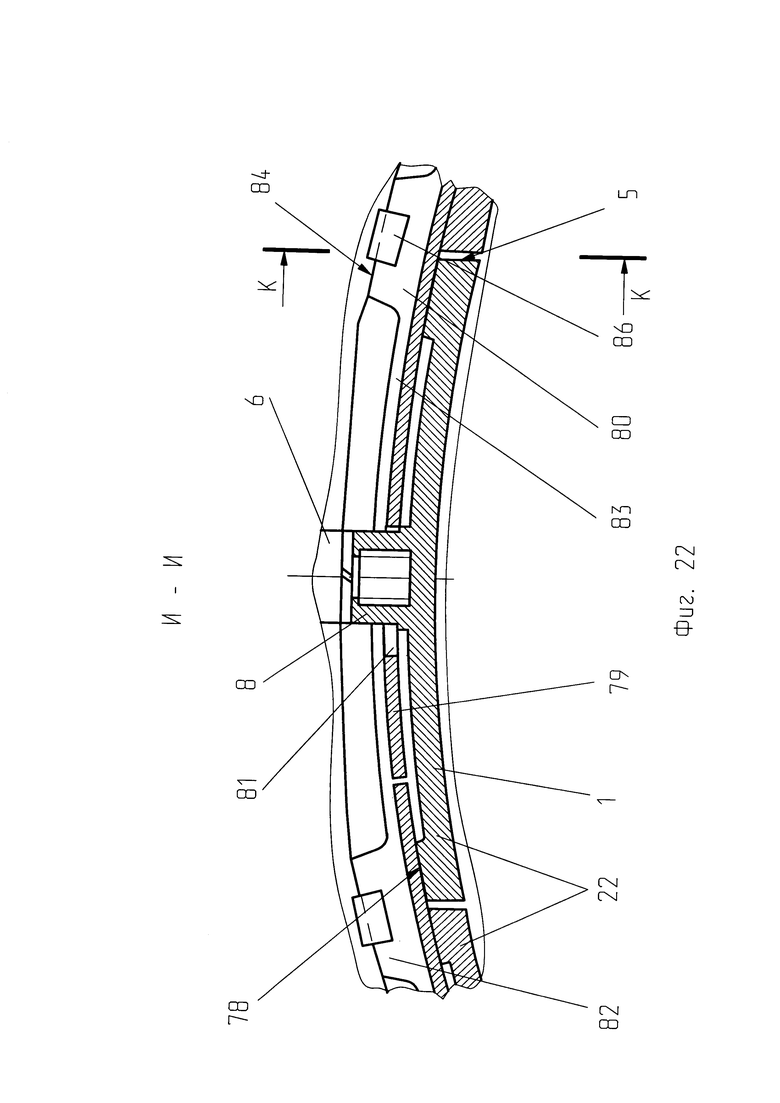
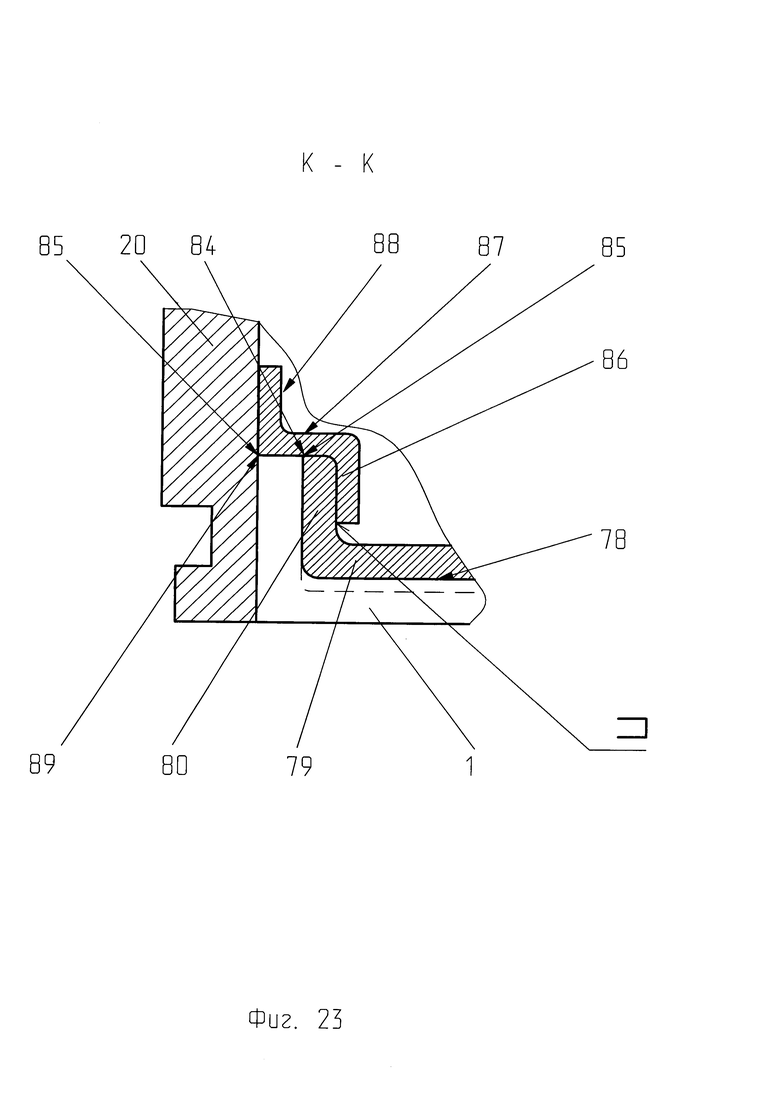
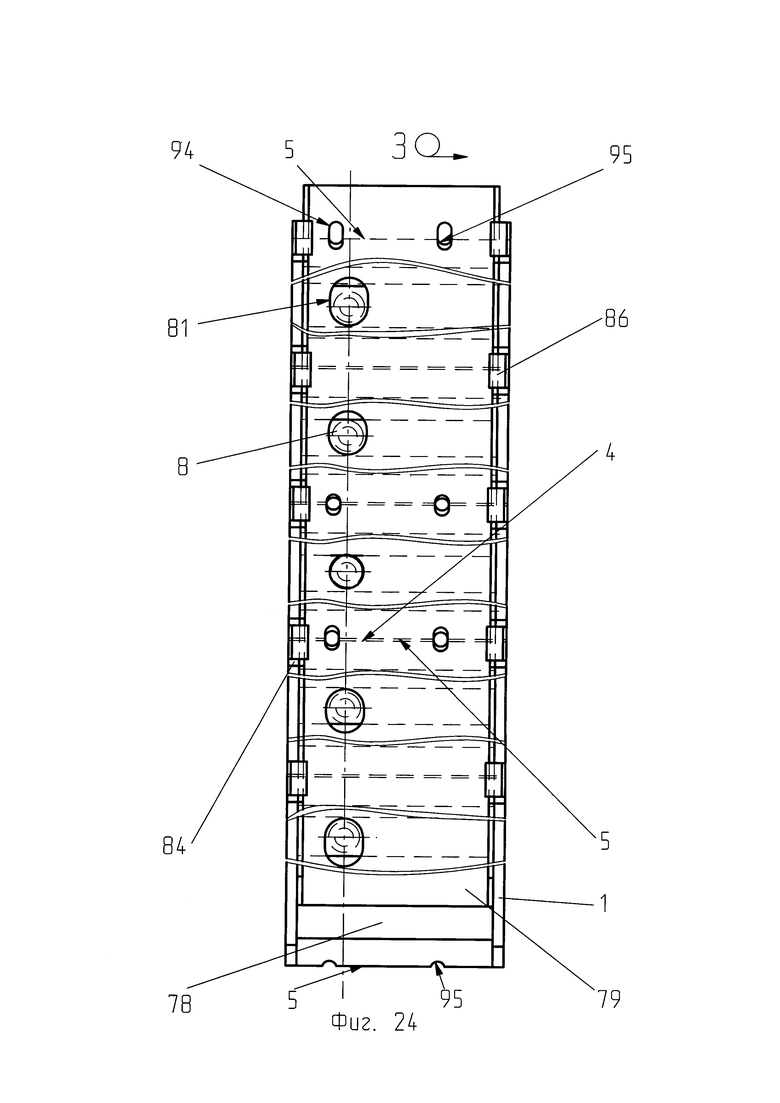
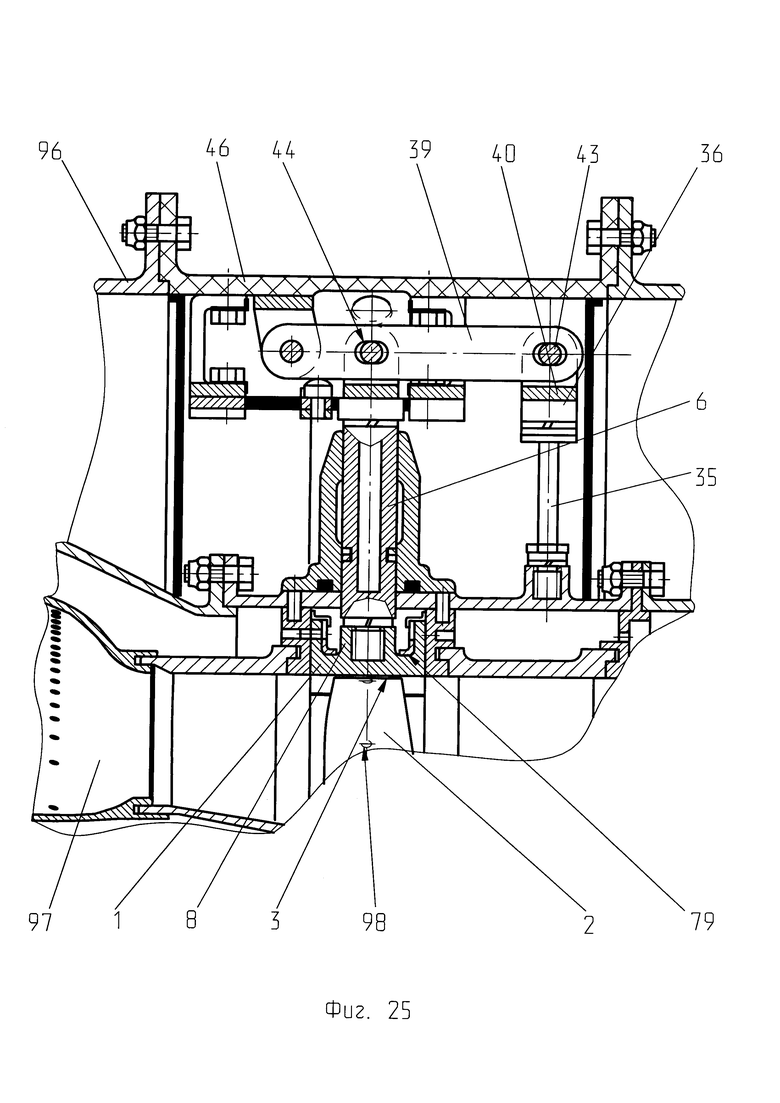
Группа изобретений относится к газотурбинным двигателям и газотурбинным установкам, в том числе к авиационным ТРД и ТРДД, а именно к устройствам регулирования радиального зазора между концами рабочих лопаток ступени ротора компрессора или турбины и статора газотурбинного двигателя. Предложено автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, содержащее сегменты, составленные в кольцо, охватывающее рабочие лопатки ротора ступени компрессора или турбины с заданным радиальным зазором по концам лопаток, и с заданными зазорами между торцами соседних сегментов, радиально расположенные стержни, соединенные с этими сегментами, механизмы позиционирования, соединенные со стержнями и осуществляющие смещение стержней и сегментов в радиальных направлениях, в направлении к продольной оси двигателя или от нее, отличающееся тем, что стержни герметично и жестко закреплены в сегментах в бобышке каждого сегмента с натягом с помощью трубной резьбы и упругой разрезной контровочной шайбы, и стержни выполнены пустотелыми и на их свободном конце меньшего диаметра также нарезана трубная резьба, каждый сегмент охватывает только рабочие лопатки рабочего колеса ступени, или выполнен в виде сегмента НА компрессора или СА турбины, сегмент наружного кольца которого выполнен с такой шириной, что его часть, свободная от лопаток НА или СА с заданным начальным радиальным зазором охватывает рабочие лопатки ответного сектора ротора, а его сегмент внутреннего кольца НА или СА охватывает с заданным начальным радиальным зазором в ответном секторе ротора зубцы лабиринтного уплотнения, и сегмент наружного кольца сегмента имеет радиальное сечение в виде швеллера, а сами сегменты располагаются в кольцевой полости корпусной секции ступени, образованной двумя вертикальными кольцевыми фланцами, которые либо закреплены в тех же фланцевых стыках, что и корпусная секция, либо с помощью радиально расположенных штифтов закреплены на корпусной секции, причем сегменты размещены с минимально возможным зазором по боковым сторонам сегмента, они составлены в кольцо с возможностью смещения в радиальных направлениях относительно кольцевых фланцев и свободного теплового расширения, с зазорами по их торцам, расположенными по радиальным направлениям, причем величина каждого из этих зазоров выбрана возможно меньшей, обеспечивающей допустимую их величину на всех режимах работы двигателя, при всех допустимых смещениях сегментов в радиальных направлениях - обеспечивающей допустимую величину неуравновешенной силы, действующей на стержень со стороны газового тракта ступени в любой момент времени работы двигателя, а на наружной поверхности корпусной секции выполнены плоские опорные площадки, на которых с помощью штифтов, винтов и контровочных шайб и уплотнительного кольца герметично закреплены опоры, и стержни проходят во второй контур ТРДД или в пространство снаружи наружного корпуса ТРД через отверстия в площадках и центральные отверстия в опорах с возможно меньшим зазором, но таким, который исключает их заклинивание на всех режимах работы двигателя, и возможность перекоса сегмента относительно оси, параллельной продольной оси двигателя, расположенной в радиальной плоскости, проходящей через место крепления стержня к сегменту, приводящего к аварийной ситуации - столкновению рабочих лопаток с торцом сегмента, первым по направлению вращения ротора, или к врезанию рабочих лопаток в сегмент, или к недопустимому снижению КПД ступени, причем у ТРДД высота опоры и длина стержня выполнены такими, что не достигают внутренней поверхности корпуса второго контура двигателя, и у ТРДД и ТРД высота опоры такая, что обе внутренние цилиндрические поверхности опоры, на которые при перекосе опирается стержень, разнесены вдоль оси стержня на расстояние между начальным поперечным сечением одной опорной поверхности и конечным другой, приблизительно равное длине большего плеча сегмента, измеренной от места крепления стержня до его торца, и соединение стержня и опоры уплотнено двумя парами поршневых колец, расположенных в кольцевых канавках стержня, причем в каждой паре поршневых колец разрезы этих колец расположены диаметрально противоположно, причем в случае крепления кольцевого фланца к корпусной секции с помощью радиально расположенных штифтов, которые фиксируются от выпадания либо приливами, выполненными на опорах, либо завальцовкой, и на внешней поверхности корпусной секции, или соседней с ней корпусной секции, в плоскости, перпендикулярной продольной оси двигателя, выполнены бобышки, расположенные в тех же радиальных плоскостях, что и стержни, и в них по резьбе с помощью упругих разрезных контровочных шайб параллельно стержням закреплены тяги, на свободных концах стержней и тяг по резьбе с помощью упругих разрезных шайб закреплены опоры, причем под каждую опору, навинченную на тягу, установлена дистанционная шайба, толщина которой подобрана таким образом, чтобы плоские опорные поверхности опор, навинченных на стержень и тягу, расположенные в одной радиальной плоскости, были перпендикулярны продольным осям стержня и тяги и располагались на одном радиальном размере, измеренном от продольной оси двигателя, и каждый механизм позиционирования состоит из рычага второго рода и шарнирно скрепленных с ним своими опорами стержня и тяги, а каждый рычаг второго рода состоит собственно из рычага, выполненного в виде плоской пластины, опор с ушками, и шарнирное соединение опор стержней и тяг с рычагами, обеспечивающее смещение стержней и тепловое удлинение тяг строго в радиальных направлениях к продольной оси двигателя и от нее, выполнено с помощью осей, с натягом неподвижно закрепленных в отверстиях ушек их опор, и свободно проходящих через сквозные пазы в рычаге, причем ширина каждого паза равна диаметру оси, а его длина выполнена такой, чтобы при поворотах рычага обеспечивалось свободное проскальзывание осей относительно сторон паза, по которым рычаг контактирует с осями, и все оси в отверстиях, в которых они неподвижно закреплены, дополнительно законтрены от их смещения и проворота стопорными винтами, завернутыми в ушки, а сами стопорные винты законтрены от отворачивания завальцовкой или кернением, а сам рычаг закреплен в своей опоре с возможностью свободного поворота относительно оси, аналогичным образом закрепленной в его опоре, и с нулевым зазором, проходящей через отверстие в рычаге, причем рычаг расположен между ушками с зазором по его боковым сторонам 0,05÷0,15 мм, и с помощью штифтов, винтов и контровочных шайб опора рычага, закреплена на опорной площадке корпуса устройства, а опоры стержня и тяги, шарнирно скрепленные с рычагом, закреплены на опорных площадках опор, навинченных на стержень и тягу, и корпус предлагаемого устройства изготовлен из композитного материала с коэффициентом температурного расширения, в разы меньшим коэффициента температурного расширения материала корпусной секции, на которой закреплены тяги, и выполнен в виде кольца, у ТРДД охватывающего обечайку первого контура двигателя и детали предлагаемого устройства, а у ТРД охватывающего наружный корпус двигателя и детали этого устройства, причем на внутренней поверхности этого кольца выполнены распределенные по окружности плоские опорные площадки, на опорных плоскостях которых, перпендикулярных средним радиальным плоскостям площадок, закреплены с помощью штифтов, винтов и контровочных шайб опоры рычагов, а на одном из торцов корпуса выполнены прямоугольные фланцы, которыми корпус с помощью болтов и самоконтрящихся гаек крепится к прямоугольным фланцам тепловых компенсаторов, расположенных в тех же радиальных плоскостях, что и стержни и тяги, а сам тепловой компенсатор выполнен из каленой шлифованной ленты, изготовленной из жаростойкой нержавеющей стали, сгофрированной в гармошку, и компенсаторы скреплены с прямоугольными фланцами заклепками, прямоугольный фланец также изготовлен из композитного материала, и компенсатор центрируется и крепится к корпусной секции в том же фланцевом стыке, что и сама корпусная секция крепится к наружному корпусу первого контура ТРДД или к наружному корпусу ТРД, а в трех опорах, навинченных на тяги, равнорасположенных по окружности, по резьбе с помощью упругих разрезных контровочных шайб в тех же радиальных плоскостях, что и тяги, параллельно им закреплены стержни, проходящие сквозь отверстия в стальных втулках, запрессованных в корпусе, с возможно меньшим зазором, но таким, что исключает возможность заклинивания стержня в корпусе при тепловом удлинении тяги, каждая группа деталей устройства, расположенных внутри корпуса закрыта обтекателем из композитного материала, выполненным в виде пустотелой лопатки с симметричным профилем поперечного сечения, и закрепленного на корпусе, или на корпусе и опорных площадках корпусной секции винтами и контровочными шайбами, и в корпусе над местами крепления опор механизмов позиционирования к опорам, навинченным на стержни, выполнены технологические отверстия, и для использования устройства на двух соседних ступенях оно просто тиражируется за исключением корпуса, компенсатора, тяг и обтекателей, но с другими требуемыми конструктивными параметрами, которые могут изменяться количественно, и при этом корпус, компенсатор, тяги и обтекатели выполняются общими для устройств обеих ступеней. Достигается упрощение конструкции. 14 з.п. ф-лы, 25 ил.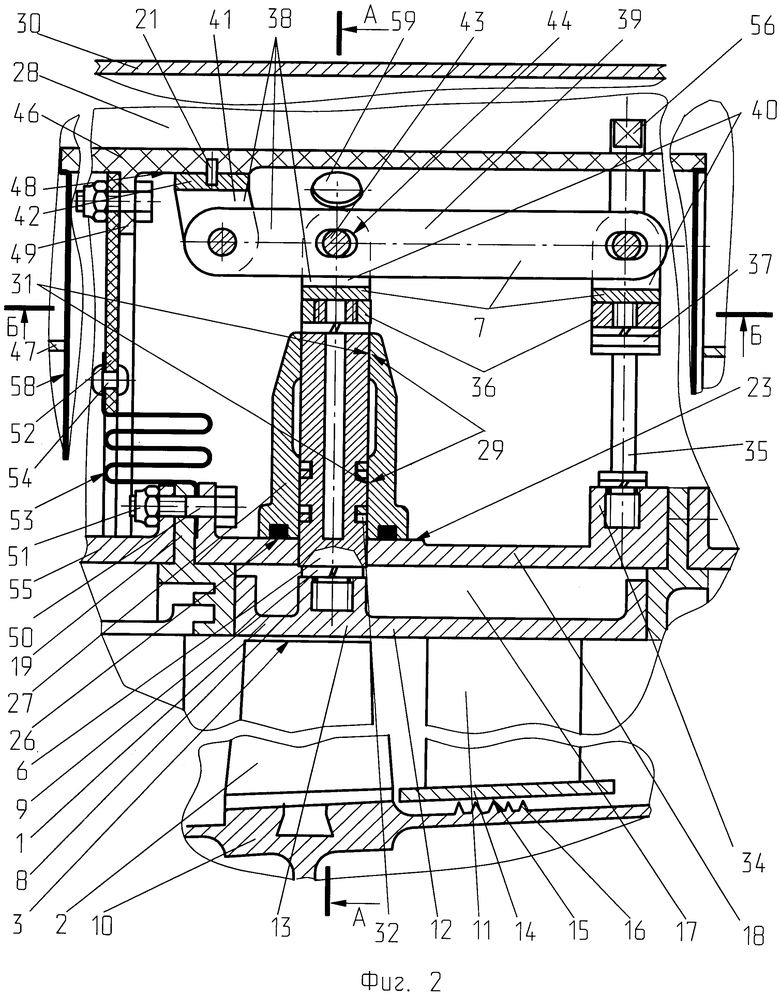
1. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя, содержащее сегменты, составленные в кольцо, охватывающее рабочие лопатки ротора ступени компрессора или турбины с заданным радиальным зазором по концам лопаток, и с заданными зазорами между торцами соседних сегментов, радиально расположенные стержни, соединенные с этими сегментами, механизмы позиционирования, соединенные со стержнями и осуществляющие смещение стержней и сегментов в радиальных направлениях, в направлении к продольной оси двигателя или от нее, отличающееся тем, что стержни герметично и жестко закреплены в сегментах в бобышке каждого сегмента с натягом с помощью трубной резьбы и упругой разрезной контровочной шайбы, и стержни выполнены пустотелыми и на их свободном конце меньшего диаметра также нарезана трубная резьба, каждый сегмент охватывает только рабочие лопатки рабочего колеса ступени, или выполнен в виде сегмента НА компрессора или СА турбины, сегмент наружного кольца которого выполнен с такой шириной, что его часть, свободная от лопаток НА или СА с заданным начальным радиальным зазором охватывает рабочие лопатки ответного сектора ротора, а его сегмент внутреннего кольца НА или СА охватывает с заданным начальным радиальным зазором в ответном секторе ротора зубцы лабиринтного уплотнения, и сегмент наружного кольца сегмента имеет радиальное сечение в виде швеллера, а сами сегменты располагаются в кольцевой полости корпусной секции ступени, образованной двумя вертикальными кольцевыми фланцами, которые либо закреплены в тех же фланцевых стыках, что и корпусная секция, либо с помощью радиально расположенных штифтов закреплены на корпусной секции, причем сегменты размещены с минимально возможным зазором по боковым сторонам сегмента, они составлены в кольцо с возможностью смещения в радиальных направлениях относительно кольцевых фланцев и свободного теплового расширения, с зазорами по их торцам, расположенными по радиальным направлениям, причем величина каждого из этих зазоров выбрана возможно меньшей, обеспечивающей допустимую их величину на всех режимах работы двигателя, при всех допустимых смещениях сегментов в радиальных направлениях - обеспечивающей допустимую величину неуравновешенной силы, действующей на стержень со стороны газового тракта ступени в любой момент времени работы двигателя, а на наружной поверхности корпусной секции выполнены плоские опорные площадки, на которых с помощью штифтов, винтов и контровочных шайб и уплотнительного кольца герметично закреплены опоры, и стержни проходят во второй контур ТРДД или в пространство снаружи наружного корпуса ТРД через отверстия в площадках и центральные отверстия в опорах с возможно меньшим зазором, но таким, который исключает их заклинивание на всех режимах работы двигателя, и возможность перекоса сегмента относительно оси, параллельной продольной оси двигателя, расположенной в радиальной плоскости, проходящей через место крепления стержня к сегменту, приводящего к аварийной ситуации - столкновению рабочих лопаток с торцом сегмента, первым по направлению вращения ротора, или к врезанию рабочих лопаток в сегмент, или к недопустимому снижению КПД ступени, причем у ТРДД высота опоры и длина стержня выполнены такими, что не достигают внутренней поверхности корпуса второго контура двигателя, и у ТРДД и ТРД высота опоры такая, что обе внутренние цилиндрические поверхности опоры, на которые при перекосе опирается стержень, разнесены вдоль оси стержня на расстояние между начальным поперечным сечением одной опорной поверхности и конечным другой, приблизительно равное длине большего плеча сегмента, измеренной от места крепления стержня до его торца, и соединение стержня и опоры уплотнено двумя парами поршневых колец, расположенных в кольцевых канавках стержня, причем в каждой паре поршневых колец разрезы этих колец расположены диаметрально противоположно, причем в случае крепления кольцевого фланца к корпусной секции с помощью радиально расположенных штифтов, которые фиксируются от выпадания либо приливами, выполненными на опорах, либо завальцовкой, и на внешней поверхности корпусной секции, или соседней с ней корпусной секции, в плоскости, перпендикулярной продольной оси двигателя, выполнены бобышки, расположенные в тех же радиальных плоскостях, что и стержни, и в них по резьбе с помощью упругих разрезных контровочных шайб параллельно стержням закреплены тяги, на свободных концах стержней и тяг по резьбе с помощью упругих разрезных шайб закреплены опоры, причем под каждую опору, навинченную на тягу, установлена дистанционная шайба, толщина которой подобрана таким образом, чтобы плоские опорные поверхности опор, навинченных на стержень и тягу, расположенные в одной радиальной плоскости, были перпендикулярны продольным осям стержня и тяги и располагались на одном радиальном размере, измеренном от продольной оси двигателя, и каждый механизм позиционирования состоит из рычага второго рода и шарнирно скрепленных с ним своими опорами стержня и тяги, а каждый рычаг второго рода состоит собственно из рычага, выполненного в виде плоской пластины, опор с ушками, и шарнирное соединение опор стержней и тяг с рычагами, обеспечивающее смещение стержней и тепловое удлинение тяг строго в радиальных направлениях к продольной оси двигателя и от нее, выполнено с помощью осей, с натягом неподвижно закрепленных в отверстиях ушек их опор, и свободно проходящих через сквозные пазы в рычаге, причем ширина каждого паза равна диаметру оси, а его длина выполнена такой, чтобы при поворотах рычага обеспечивалось свободное проскальзывание осей относительно сторон паза, по которым рычаг контактирует с осями, и все оси в отверстиях, в которых они неподвижно закреплены, дополнительно законтрены от их смещения и проворота стопорными винтами, завернутыми в ушки, а сами стопорные винты законтрены от отворачивания завальцовкой или кернением, а сам рычаг закреплен в своей опоре с возможностью свободного поворота относительно оси, аналогичным образом закрепленной в его опоре, и с нулевым зазором, проходящей через отверстие в рычаге, причем рычаг расположен между ушками с зазором по его боковым сторонам 0,05÷0,15 мм, и с помощью штифтов, винтов и контровочных шайб опора рычага, закреплена на опорной площадке корпуса устройства, а опоры стержня и тяги, шарнирно скрепленные с рычагом, закреплены на опорных площадках опор, навинченных на стержень и тягу, и корпус предлагаемого устройства изготовлен из композитного материала с коэффициентом температурного расширения, в разы меньшим коэффициента температурного расширения материала корпусной секции, на которой закреплены тяги, и выполнен в виде кольца, у ТРДД охватывающего обечайку первого контура двигателя и детали предлагаемого устройства, а у ТРД охватывающего наружный корпус двигателя и детали этого устройства, причем на внутренней поверхности этого кольца выполнены распределенные по окружности плоские опорные площадки, на опорных плоскостях которых, перпендикулярных средним радиальным плоскостям площадок, закреплены с помощью штифтов, винтов и контровочных шайб опоры рычагов, а на одном из торцов корпуса выполнены прямоугольные фланцы, которыми корпус с помощью болтов и самоконтрящихся гаек крепится к прямоугольным фланцам тепловых компенсаторов, расположенных в тех же радиальных плоскостях, что и стержни и тяги, а сам тепловой компенсатор выполнен из каленой шлифованной ленты, изготовленной из жаростойкой нержавеющей стали, сгофрированной в гармошку, и компенсаторы скреплены с прямоугольными фланцами заклепками, прямоугольный фланец также изготовлен из композитного материала, и компенсатор центрируется и крепится к корпусной секции в том же фланцевом стыке, что и сама корпусная секция крепится к наружному корпусу первого контура ТРДД или к наружному корпусу ТРД, а в трех опорах, навинченных на тяги, равнорасположенных по окружности, по резьбе с помощью упругих разрезных контровочных шайб в тех же радиальных плоскостях, что и тяги, параллельно им закреплены стержни, проходящие сквозь отверстия в стальных втулках, запрессованных в корпусе, с возможно меньшим зазором, но таким, что исключает возможность заклинивания стержня в корпусе при тепловом удлинении тяги, каждая группа деталей устройства, расположенных внутри корпуса закрыта обтекателем из композитного материала, выполненным в виде пустотелой лопатки с симметричным профилем поперечного сечения, и закрепленного на корпусе, или на корпусе и опорных площадках корпусной секции винтами и контровочными шайбами, и в корпусе над местами крепления опор механизмов позиционирования к опорам, навинченным на стержни, выполнены технологические отверстия, и для использования устройства на двух соседних ступенях оно просто тиражируется за исключением корпуса, компенсатора, тяг и обтекателей, но с другими требуемыми конструктивными параметрами, которые могут изменяться количественно, и при этом корпус, компенсатор, тяги и обтекатели выполняются общими для устройств обеих ступеней.
2. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по п. 1, отличающееся тем, что оси изготавливают из бронзы БрС30 и наносят на них слой твердой смазки.
3. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1 и 2, отличающееся тем, что его рычаг выполнен в виде рычага второго рода (L=L2), и сам рычаг имеет форму плоской пластины, и на неработающем двигателе расположен параллельно продольной оси двигателя, и координата крепления стержня к сегменту X1 определяется из соотношения

и плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, определяется из соотношения 
в этих соотношениях С'r - сумма теплового радиального расширения ротора, вытягивания рабочей лопатки и замковой части диска ступени под действием центробежных сил в поперечном сечении, где расположено крепление стержня к сегменту, и зазора в демпфере со сдавливаемой пленкой смазки опоры ротора, C'st - сумма теплового радиального расширения корпусной секции и ее деформаций в радиальном направлении под действием давления в газовом тракте первого контура ТРДД или в газовом тракте ТРД и динамических сил в поперечном сечении, где расположено крепление тяги, C'sk - сумма теплового радиального расширения корпуса устройства и его деформаций в радиальном направлении под действием динамических сил у ТРДД или ТРД в поперечном сечении, где расположена опора рычага, причем параметры  и
и  определены на крейсерском режиме работы двигателя в момент времени t, когда функция
определены на крейсерском режиме работы двигателя в момент времени t, когда функция

достигает минимума, Сс - тепловое удлинение расстояния от места крепления стержня к сегменту до оси крепления к рычагу опоры, закрепленной на опоре, навинченной на стержень, и Ct - тепловое удлинение расстояния от места крепления тяги к корпусной секции до оси крепления к рычагу опоры, закрепленной на опоре, навинченной на тягу, определенные на крейсерском режиме работы двигателя, Zop - заданная возможно наименьшая, оптимальная величина радиального зазора между концами рабочих лопаток ротора и статором компрессора или турбины на крейсерском режиме, Zm - заданная монтажная величина этого зазора, Х2 - заданная координата расположения оси крепления к рычагу опоры, закрепленной на опоре, навинченной на тягу, Х3 - заданная координата расположения оси опоры рычага, L2=Х2-Х3 плечо рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, причем эти параметры заданы таким образом, что величина Zmg радиального зазора по концам рабочих лопаток ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения

при соответственной подстановке в него C'st, C'sk, С'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, плечо L1 получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
4. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1 и 2, отличающееся тем, что его рычаг выполнен в виде рычага второго рода (L=L1), и сам рычаг имеет форму плоской пластины, и на неработающем двигателе расположен параллельно продольной оси двигателя, и координата крепления стержня к сегменту Х1 определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на крейсерском режиме работы двигателя и значения параметров C'st, C'sk, С'r, определенных на этом же режиме в моменты времени t, когда функция (1) достигала минимума, и заданных параметров: Zop - возможно наименьшей, оптимальной величины радиального зазора между концами рабочих лопаток ротора и статором компрессора или турбины на крейсерском режиме, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси крепления опоры тяги к рычагу, Х3 - координаты расположения оси опоры рычага, L2=X2-Х3 плеча рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, причем эти параметры заданы таким образом, что величина Zmg радиального зазора по концам рабочих лопаток ротора на режиме малого газа и величина Zp этого радиального зазора на режиме приемистости при уходе самолета на второй круг, найденные из соотношения (8) при соответственной подстановке в него C'st, C'sk, С'r, определенных для этих режимов в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов, чтобы плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, определенное из соотношения (7), получилось конструктивным и Zmg≤Zmgd, и Zp≤Zpd, и при этом на малом газе отсутствует врезание рабочих лопаток и при приемистости на взлетном режиме отсутствует провал тяги.
5. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя по любому из пп. 1 и 2, отличающееся тем, что его рычаг выполнен в виде рычага второго рода (L=L1), задают величину Zp=Zpop, где Zpop возможно наименьшая, но исключающая врезание лопаток величина радиального зазора на взлетном режиме, и координата крепления стержня к сегменту X1 определяется из соотношения (6), но при подстановке в эти выражения значения параметров Ct и Сс на взлетном режиме и значения параметров C'st, C'sk, C'r, определенных на этом же режиме в моменты времени, когда функция (1) достигала минимума, и заданных параметров: Zpop, Zm - монтажной величины этого зазора, Х2 - координаты расположения оси крепления опоры, закрепленной на опоре, навинченной на тягу, Х3 - координаты расположения оси опоры рычага, L2=Х2-Х3 плеча рычага между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на тягу, и из соотношения (8) при соответственной подстановке в него C'st, C'sk, С'r, определенных для крейсерского режима и режиме малого газа в моменты времени t, когда функция (1) на этих режимах достигала минимума, и параметров Ct и Сс, также определенных соответственно для каждого из этих режимов определяются величина радиального зазора на крейсерском режиме Zkr и величина радиального зазора на режиме малого газа Zmg, и для известных координат X1, Х2, Х3 определяется плечо рычага L1 между осью опоры рычага и осью опоры, закрепленной на опоре, навинченной на стержень, и при этом на малом газе отсутствует врезание рабочих лопаток, а на крейсерском режиме обеспечивается требуемые величины КПД ступени и удельного расхода топлива двигателем Ср.
6. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-5, отличающееся тем, что каждый рычаг дополнительно упруго подвешен на упругогистерезисном элементе, закрепленном на опоре или двух опорах, закрепленных на корпусе устройства, и контактирующим с натягом на всех режимах работы двигателя с рычагом (L=L2) на плече L4<L1 или с рычагом (L=L1) на плече L4<L2, создающим радиальное усилие, действующее на рычаг в направлении от продольной оси двигателя, по величине большее или достаточное для смещения у неработающего двигателя стержня с сегментом в этом направлении на величину зазора, образовавшегося от взаимного износа осей и пазов.
7. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-6, отличающееся тем, что упругогистерезисные элементы устройства выполнены либо в виде спиральной пружины сжатия, одним торцом без зазора надетой на штифт, запрессованный в опору, закрепленную на корпусе устройства, а другим торцом контактирует с рычагом с натягом

в случае использования рычага (L=L2), и с натягом

в случае использования рычага (L=L1), где С'rm - максимальное значение функции С'r, вычисленное для взлетного режима, либо упругогистерезисные элементы выполнены в виде упругого разрезного кольца, надетого без зазора на штифт, запрессованный в опору, закрепленную на корпусе устройства, и контактирующего с рычагом с натягом (9) в случае использования рычага (L=L2), или (10) в случае использования рычага (L=L1), либо в виде гофра, своими концами надетого с зазорами на штифты, запрессованные в опору, закрепленную на корпусе устройства, и контактирующего с рычагом в своем среднем поперечном сечении с таким же натягом - (9) или (10), и величина плеча L4 выбрана из условия обеспечения конструктивности рычага и конструктивности и прочности упругогистерезисного элемента.
8. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-6, отличающееся тем, что каждый рычаг упруго подвешен на двух симметрично расположенных с двух сторон рычага рессорах, выполненных каждая в виде многослойного пакета, набранного из стальных, каленых или нагартованных, шлифованных лент, изготовленных из нержавеющей стали, покрытых износостойким покрытием, либо сжатого равнораспределенной нагрузкой - давлением сжатого воздуха во втором контуре ТРДД, либо каждая рессора собрана в следующей компоновке: ее пакет собран из лент одинаковой толщины, в центре его установлены две, три и более гладких лент, на них с двух сторон установлены пакеты, собранные «гофр в гофр» из двух и более гофрированных лент таким образом, что вершины гофров одного пакета опираются на пакет гладких лент в тех же сечениях, что и вершины второго пакета, и шаг гофров гофрированных лент выбран таким, что в пролете пакета располагается только одна вершина, опирающаяся на пакет гладких лент в середине пролета, и под каждой опорой рессоры располагается только одна вершина гофра, а на пакеты гофрированных лент установлены пакеты, собранные из одной, двух и более гладких лент, и в собранной рессоре гофры гофрированных лент полностью выпрямлены, и центральные и концевые опоры рессор выполнены общими для обеих рессор, опоры рессор выполнены разъемными и состоят из крышки и основания, скрепленных двумя винтами и контровочными шайбами, но у концевой опоры, закрепленной в средней части корпуса, крышки выполнены отдельно для каждой рессоры, и пакет каждой из рессор в центральной опоре и двух концевых опорах закреплен неподвижно с помощью скрепляющего крышку и основание винта, расположенного сбоку пакета без зазора в полукруглой выемке, выполненной в лентах, а в другой концевой опоре - двумя винтами, либо пакет в концевых опорах закреплен с возможностью смещения его концов вдоль его продольной оси в пределах прямого участка, выполненного в этом случае в центральной части полукруглой выемки, а в центральную опору запрессован упор из бронзы БрС30, и рессоры своими концевыми опорами закреплены на опорах - кронштейнах, закрепленных с помощью винтов и контровочных шайб на корпусе устройства, и при этом за счет упругой деформации пакетов создан натяг Н, определяемый из соотношения (9) или (10), прижимающий на плече L4 упор из бронзы БрС30 своим сферическим концом, покрытым твердой смазкой, с требуемым усилием, направленным радиально от продольной оси двигателя, к рычагу.
9. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-8, отличающееся тем, что опоры стержней, закрепляемые на опорных площадках корпусной секции, выполнены из легкого сплава - титанового, алюминиевого, или магниевого, и в них запрессованы стальные втулки с расположенными в их канавках поршневыми уплотнительными кольцами.
10. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-9, отличающееся тем, что устройство состоит из двух частей - устройств управления радиальным зазором у ступени, объединенных в одно устройство управления радиальными зазорами у обеих ступеней деталями, общими для обоих устройств, причем устройства управления радиальным зазором у ступени, без общих деталей, выполнены либо по любому, но одному и тому же пункту формулы изобретения, либо по любым, но разным пунктам формулы изобретения, а как общие детали выполнены: тяги, навинченные на них опоры, установленные под ними дистанционные и контровочные шайбы, закрепленные на этих опорах двумя винтами и контровочными шайбами опоры с ушками, причем тяги закреплены на общей для обеих ступеней корпусной секции, и к опорам, закрепленным на опорах, навинченных на тяги, шарнирно прикреплены рычаги механизмов позиционирования каждого из устройств управления радиальным зазором у ступени, общими для обеих ступеней выполнены также: корпус устройства, тепловой компенсатор и три цилиндрических направляющих стержня, равнорасположенных по окружности, закрепленных параллельно тягам в опорах, закрепленных на опорах, навинченных на тяги, и проходящих через отверстия в корпусе с возможно меньшим зазором, но таким, который исключает заклинивание этих стержней в отверстиях на всех режимах работы двигателя, и корпусная секция, каждая часть которой выполнена соответственно тому пункту формулы изобретения, которому соответствует устройство управления радиальным зазором у ступени, которую охватывает эта часть корпусной секции, и кольцевое пространство под корпусной секцией разделено между ступенями кольцевым вертикальным фланцем, закрепленным на ней радиально расположенными штифтами, запрессованными во фланец и корпусную секцию и зафиксированными от выпадания завальцовкой, и у ТРДД обтекатели, охватывающие тепловой компенсатор, механизмы позиционирования опоры стержней и сами стержни и опоры, закрепленные на них, устройств управления радиальными зазорами обеих ступеней, и тяги с закрепленными на них опорами.
11. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-9, отличающееся тем, что каждый сегмент устройства выполнен в виде сегмента НА, расположенного перед рабочим колесом последней ступени КВД, содержащего часть, охватывающую рабочие лопатки колеса последней ступени КВД с радиальным зазором, и часть, охватывающую с радиальным зазором зубцы лабиринтного уплотнения сектора ротора перед рабочим колесом последней ступени КВД, и корпусная секция последней ступени КВД разделена на три кольцевых пространства, в которых размещены: НА, расположенный перед рабочим колесом, части сегментов, охватывающие рабочие лопатки колеса последней ступени КВД, и закреплен НА, расположенный за рабочим колесом, тремя вертикальными кольцевыми фланцами, два из которых закреплены в тех же фланцевых стыках, что и корпусная секция, а один, к которому крепиться этот НА, закреплен с помощью радиально расположенных штифтов, запрессованных во фланец и корпусную секцию и зафиксированных от выпадания либо приливами, выполненными на опорах стержней, закрепленных на корпусной секции, либо завальцовкой.
12. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по любому из пп. 1-9, отличающееся тем, что сегменты выполнены с шириной, измеренной вдоль продольной оси двигателя, охватывающей с заданным радиальным зазором только лопатки рабочего колеса ступени, и на внутренней поверхности стенки швеллера каждого сегмента, на его концах и в месте расположения бобышки, в которой крепится стержень, выполнены опорные площадки, свободные опорные поверхности которых являются частями цилиндрической поверхности, концентричной продольной оси двигателя, и сегменты с возможно меньшими зазорами по их полкам расположены в кольцевом пространстве, образованном корпусной секцией и двумя кольцевыми фланцами, закрепленными на корпусной секции радиально расположенными штифтами, запрессованными во фланцы и корпусную секцию и зафиксированными от выпадания приливами, выполненными у опор стержней, закрепленных на корпусной секции, и сегменты надеты на разрезное упругое уплотнительное кольцо с нулевым зазором по фигурным фланцам, выполненным по его бокам, таким образом, что бобышка каждого сегмента с зазором проходит через отверстие в кольце, причем диаметр отверстия, через которое проходит бобышка стержня, расположенного противоположно разрезу кольца таков, что величина зазора между этой бобышкой и отверстием составляет 0,1÷0,2 мм, а другие отверстия, через которые проходят бобышки, выполнены в виде пазов с большим размером, направленным в окружном направлении, причем этот размер паза тем больше, чем паз ближе к разрезу кольца, и эти размеры пазов выполнены такими, что допускают максимальное потребное увеличение диаметра кольца, составленного из сегментов, и диаметра разрезного уплотнительного кольца, и фигурные фланцы упругого уплотнительного кольца имеют форму выступов с шириной, равной хорде опорных площадок, расположенных на концах соседних сегментов, перекрывающих стыки сегментов, с наружным диаметром, равным наружному диаметру полок сегментов, соединенных отбортовками, и на выступах и полках сегментов симметрично стыку полок соседних сегментов выполнены плоские опорные площадки, причем кромки этих опорных площадок оставлены острыми, а на фигурных фланцах герметично закреплены упругие уплотнительные элементы, изготовленные из нержавеющей, закаленной, шлифованной ленты из жаропрочной стали или сплава, без зазоров одной полкой опирающиеся на плоские опорные площадки, а другой полкой прижатые к кольцевому фланцу, с которым контактируют полки сегментов, на которые опираются эти упругие элементы, и кромка, по которой пересекаются опорные поверхности полок каждого упругого элемента, также выполнена острой, и в собранном устройстве упругое уплотнительное разрезное кольцо с натягом прижато к опорным площадкам сегментов, и упругими элементами к плоским опорным площадкам и кольцевым фланцам, а на всех режимах работы двигателя уплотнительное кольцо и упругие элементы дополнительно прижаты к опорным площадкам еще и давлением вторичного воздуха, который поступает из камеры сгорания в кольцевую полость над наружным кольцом СА, расположенным перед рабочим колесом ступени, и через равнорасположенные отверстия в кольцевом фланце, закрепленном на корпусной секции штифтами, в кольцевую полость над сегментами и упругим уплотнительным разрезным кольцом, и из этой полости через равнорасположенные отверстия в другом таком же кольцевом фланце, в кольцевую полость над наружным кольцом СА, расположенным за рабочим колесом ступени, и диаметры этих отверстий и их количество подобраны так, что приближенно выполняется одинаковость эпюр давления вторичного воздуха в кольцевой полости и давления на сегменты в газовом тракте ступени, и площади опорных площадок сегментов и плоских опорных площадок выбраны таким образом, чтобы на взлетном режиме усилия, действующие на тяги, были меньше допустимого, и разрез в упругом уплотнительном кольце выполнен в его поперечном сечение с отбортовками, и один из сегментов ступени выполняется с торцами, срезанными параллельно продольной оси стержня, закрепленного на этом сегменте, а ответные торцы двух сегментов, соседних с этим сегментом, срезаны так же, как у этого сегмента.
13. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по п. 12, отличающееся тем, что в упругом разрезном уплотнительном кольце выполнено два ряда пазов с большим размером, направленным в окружном направлении, расположенных над зазорами между торцами соседних сегментов, причем один ряд пазов расположен в области более высокого давления воздуха в газовом тракте ступени, а другой ряд - в области более низкого давления воздуха, и зазоры по торцам сегментов выполнены минимально допустимой величины, и такими, что на взлетном режиме двигателя величина зазора была 0,1÷0,2 мм, и на торце одного из соседних сегментов выполнены две выемки, расположенные под пазами, причем больший размер паза тем больше, чем паз ближе к разрезу кольца, и эти размеры пазов выполнены такими, что на всех режимах работы двигателя открыта площадь выемок, обеспечивающая высокую эффективность предложенного устройства, и в любой момент времени работы двигателя величина неуравновешенной нагрузки, действующей на сегменты со стороны газового тракта ступени, не превышает допустимую величину.
14. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по п. 12, отличающееся тем, что опорными площадками для упругого разрезного уплотнительного кольца служат все внутренние поверхности стенок сегментов, за исключением бобышек, в которых крепятся стержни.
15. Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора газотурбинного двигателя по п. 14, отличающееся тем, что корпус устройства непосредственно закреплен на гондоле и стержни, направляющие тяги и фиксирующие корпус, не ставятся, и длина пазов, выполненных в рычагах, допускает свободное проскальзывание вдоль них осей, закрепленных в опорах, закрепленных на опорах, навинченных на стержни и тяги, не только при повороте рычагов, но и смещении стержней и тяг в направлении продольной оси двигателя, вызванное тепловым удлинением статора двигателя, и для крейсерского режима величины плеча L1 и отношения L1/L2 определены так, что величина радиального зазора на этом режиме равна Zop и при этом получены хорошие значения радиальных зазоров при приемистости на взлетном режиме при уходе самолета на второй круг Zp, малом газе Zmg, и останове двигателя, обеспечивающие достаточно высокую эффективность предлагаемого устройства и на этих режимах работы двигателя.
| ТУРБИНА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2504663C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЩЕЛОЧНОГАЛОИДНЫХ^' КРИСТАЛЛОВ | 0 |
|
SU168262A1 |
| WO 2011030051 A1, 17.03.2011 | |||
| СПОСОБ ОБРАБОТКИ СТОЧНЫХ ВОД | 1993 |
|
RU2057722C1 |
| Способ контроля состояния реактора с неподвижным слоем катализатора | 1989 |
|
SU1741880A1 |

