Изобретение касается нанесения покрытий в вакууме и чистых технологических средах.
Цель изобретения - повышение точности позиционирования при обеспечении возможности контроля величины перемещения.
Введение в механизм прямолинейного перемещения биметаллических пластин или биморфов обеспечивает изменение кривизны бипластин при подаче на них электрического напряжения регулируемой величины, а следовательно, возможность перемещения стержня в прецизионном возвратно-поступательном режиме работы, что и позволяет достичь указанную в формуле изобретения цель - повышение точности позиционирования при обеспечении возможности контроля величины перемещения.
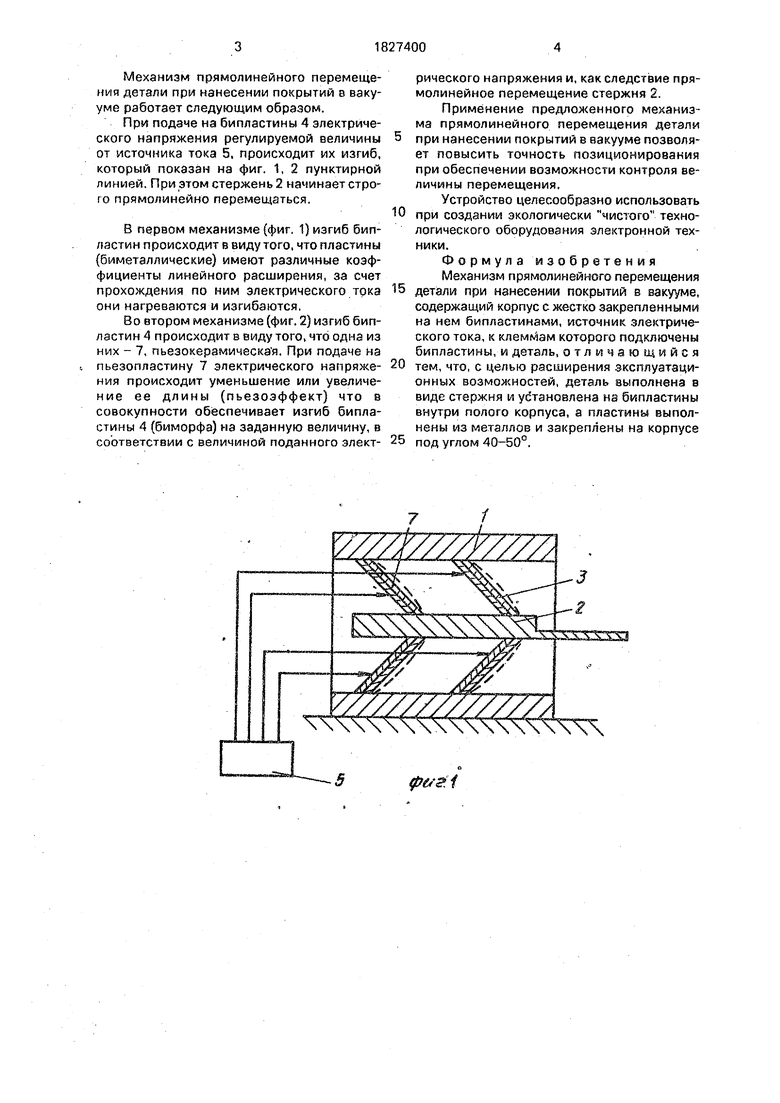
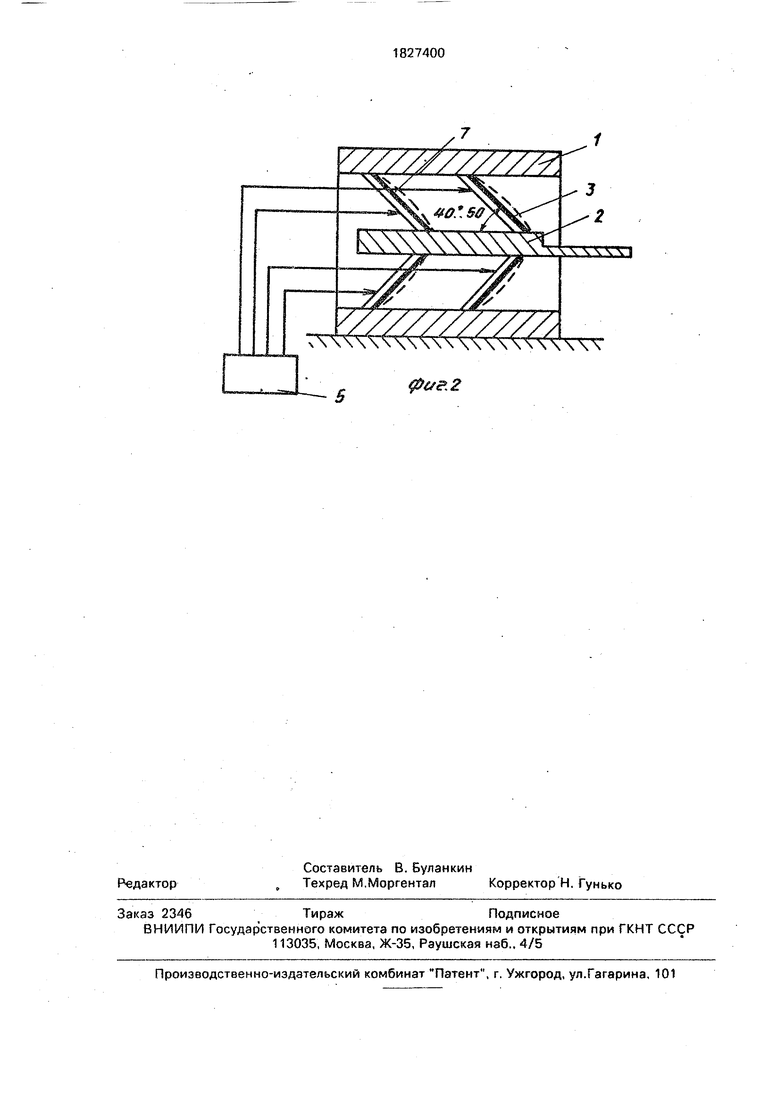
На фиг. 1 изображен механизм с биметаллическими пластинами; на фиг. 2 - механизм с биморфами.
Механизм прямолинейного перемещения содержит корпус 1, внутри которого расположен подвижный стержень 2 на опорах в виде упругих пружин 3. Упругие пружины 3 выполнены в виде бипластин 4 с углом наклона к горизонтали 40-50°, жестко связанных между собой с возможностью подачи на них электрического напряжения регулируемой величины от источника напряжения 5. Бипластины 4 (фиг. 1} выполнены из металлов с различными коэффициентами линейного расширения или в виде биморфов (фиг. 2) - одна пластина 6 - металлическая, а другая 7 пьезокерамическая. Углы наклона бипластин к горизонта л е 40-50° выбраны таким образом, чтобы перемещение стержня 2 было максимальным.
(Л
С
со го -ч
4 О О
Механизм прямолинейного перемещения детали при нанесении покрытий в вакууме работает следующим образом.
При подаче на бипластины 4 электрического напряжения регулируемой величины от источника тока 5. происходит их изгиб, который показан на фиг. 1, 2 пунктирной линией. При этом стержень 2 начинает строго прямолинейно перемещаться.
В первом механизме {фиг. 1) изгиб бип- ластин происходит в виду того, что пластины (биметаллические) имеют различные коэффициенты линейного расширения, за счет прохождения по ним электрического тока они нагреваются и изгибаются.
Во втором механизме (фиг. 2) изгиб бип- ластин 4 происходит в виду того, что одна из них - 7, пьезокерамическа я. При подаче на пьезопластину 7 электрического напряжения происходит уменьшение или увеличение ее длины (пьезоэффект) что в совокупности обеспечивает изгиб бипластины 4 (биморфа) на заданную величину, в соответствии с величиной поданного элект0
рического напряжения и, как следствие прямолинейное перемещение стержня 2.
Применение предложенного механизма прямолинейного перемещения детали при нанесении покрытий в вакууме позволяет повысить точность позиционирования при обеспечении возможности контроля величины перемещения.
Устройство целесообразно использовать при создании экологически чистого технологического оборудования электронной техники.
Формула изобретения
Механизм прямолинейного перемещения 5 детали при нанесении покрытий в вакууме, содержащий корпус с жестко закрепленными на нем бипластинами, источник электрического тока, к клеммам которого подключены бипластины, и деталь, отличающийся тем, что, с целью расширения эксплуатационных возможностей, деталь выполнена в виде стержня и установлена на бипластины внутри полого корпуса, а пластины выполнены из металлов и закреплены на корпусе под углом 40-50°.
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрическое реле | 1981 |
|
SU987709A1 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО НА ОСНОВЕ МНОГОСЛОЙНОЙ АКТИВНОЙ БИМОРФНОЙ СТРУКТУРЫ | 1996 |
|
RU2099754C1 |
| Устройство для прецизионного перемещения изделий | 1989 |
|
SU1713065A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИБОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2472253C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ ДВУСТАБИЛЬНОЕ РЕЛЕ | 2010 |
|
RU2439736C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2002 |
|
RU2212672C1 |
| Устройство для ориентированного перемещения изделий | 1982 |
|
SU1018265A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| СПОСОБ ЭЛЕКТРОШЛАКОВОЙ НАПЛАВКИ НА ЗАГОТОВКУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730360C1 |
| Электромеханический преобразователь крутильных колебаний | 1977 |
|
SU686155A1 |
Изобретение касается нанесения покрытий в вакууме и чистых технологических средах. Цель изобретения - повышение точности позиционирования при обеспечении возможности контроля величины перемещения. Поставленная цель достигается тем. что упругие элементы выполнены в виде бипластин, жестко связанных между собой, с возможностью подачи на бипластины электрического.напря- жения регулируемой величины, причем бипластины могут быть выполнены из металлов с различными коэффициентами линейного расширения или в виде биморфов - одна пластина металлическая, а другая -пьезокерами- ческая, а угол наклона пластин к горизонтали будет 40-50°. 2 ил.
ф&9.1
4&&е.2
| МЕХАНИЗМ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛИ ПРИ НАНЕСЕНИИ ПОКРЫТИЙ В ВАКУУМЕ | 0 |
|
SU337448A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для ориентации | 1973 |
|
SU497551A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
