1
Устройство относится к системам автоматического контроля и регулирования.
Известны устройства для измерения линейных перемещений, содержащие ферромагнитный якорь, помещенный внутри немагнитного цилиндра, на котором расположены контурная и вспомогательные обмотки, причем -контурная обмотка расположена между вспомогательными обмотками, подключенные через конденсаторы и диоды к блоку управления и к задающему контуру генератора, выход которого через преобразователь и блок вычитания подсоединен к регистратору.
Предлагаемое устройство отличается тем, что в нем еа одном конце немагнитного цилиндра установлены дополнительные контурная и вспомогательная обмотки, подключенные через конденсаторы и диоды к блоку управления и задающему контуру генератора.
Такое выполнение позволяет повысить точность .работы устройства за счет снижения погрещности, вызванной дрейфом .нуля и нелинейностью характеристики.
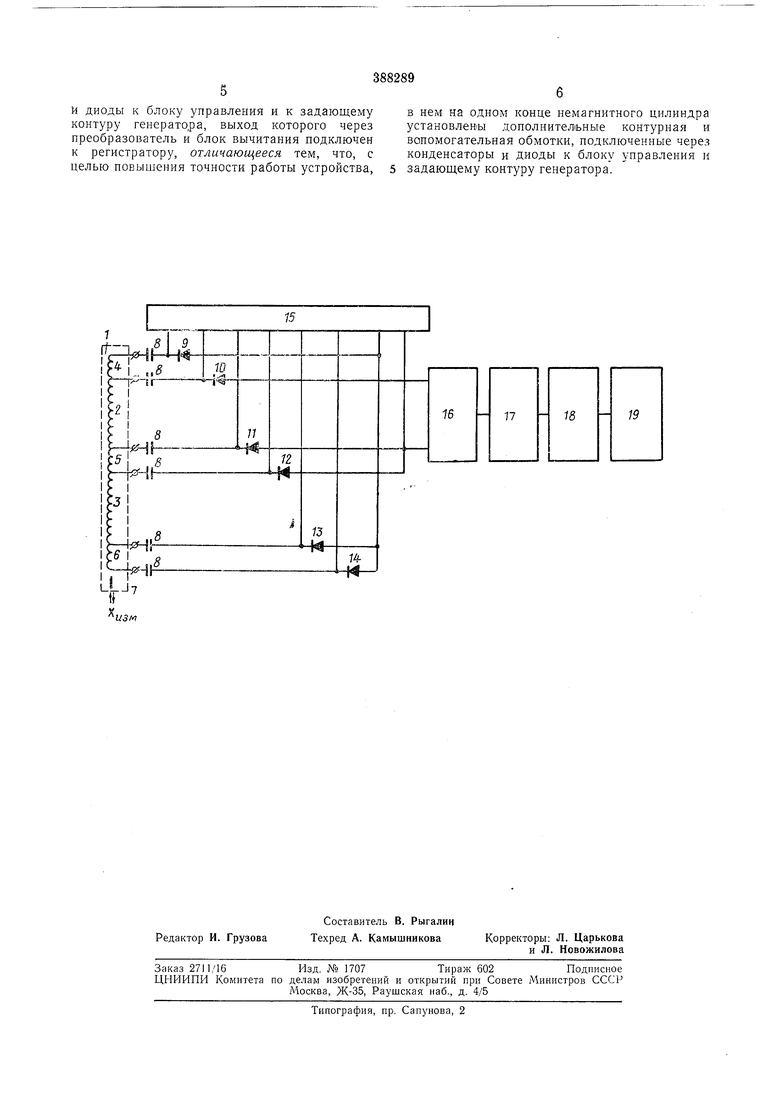
На чертел е показана блок-схема устройства.
Она содержит: соленоидальный датчик / в виде немагнитного цилиндра, на котором расположены контурные 2 и 3 И вспомогательные 4, 5 Е 6 обмотки, а внутри него размещен ферромагнитный якорь 7; конденсаторы 8; диоды 9-14; блок 15 управления; генератор 16 с самовозбуждением; преобразователь 17 частоты в число импульсов; блок 18 вычитания и регистратор 19.
Контурные 2 и 3 и вспомогательные 4, 5 н 6
обмотки подключены через конденсаторы 8 и диоды 9-14 к задающему контуру генератору 16 с самовозбуждением. Устройство работаег следующим образом. Индуктивность L датчика / изменяется под
воздействием входного перемещения, с.мещагощего ферромагнитный якорь 7 относительно обмоток 2-5. Осуществляется преобразованпе L - fpi{x). На выходе генератора получается: /-Ф2 (L). Некоторому j-му положению якоря
соответствуют определенные значения индуктивности Li, частоты /; и числа импульсов Л ,на выходе преобразователя 17. Обмотки 4 и 2, 5 и 3, 2 и 5, 5 и б в случае отсутствия якоря идентичны, так как каждая из них состоит из
последовательно соединенных контурной и вспомогательной обмоток. В исходном положении, соответствующем среднему значению измеряемого перемещения , якорь датчика симметрируется относительно обмоток 4 и 2.
5 и 3.
Таким образом, при переключении этих обмоток в задающем контуре частота генератора 16 не меняется, оставаясь равной /о. При отклонении входного перемещения от иачалыюго значения ло на величину х„зм в ту или 1ную
сторону симметрия якоря относительно обмоток 4 к 2, 5 к 3 нарушается. Принимается за пололсителъное направление изменения Хизм относительно некоторой обмотки такое, при котором якорь выдвигается из этой обмотки, вследствие чего индуктивность ее возрастает, а частота генератора падает.
Характеристика /(х) генератора с самовозбуждением при использовании индуктивных датчиков соленоидального типа с цилиндрическим ферритовым якорем может быть кусочноаппроксимирована зависимостями вида
f afX + bi; f f uix + bix + c,
где , 2, ..., n;
ai,bi,Ci - параметры функции преобразовате- ля для i-ro участка аппроксимации; п - число участков аппроксимации.
Кусочно-параболическая аппроксимация является наиболее точной и позволяет максимально использовать рабочий диапазон преобразователя.
Нестабильность параметров а,, bi, Ci при изменении внешних условий, в особенности температуры, а также от самоцроизвольного временного дрейфа характеристик шервичных преобразователей - источник погрешностей устройства для измерения перемешевий.
Для устранения влияния вариации указанных параметров на точность устройства измерение проводят в два такта.
В первом такте блок управления открывает диод // (в исходном состоянии все диоды заперты), обеспечивая тем самым подключение к генератору 16 вывода, общего для обмоток 4-2 и 5-3. При открытом диоде // проводят два последовательных измерения: сначала с открытым диодом Я затем с открытым диодом 13. В первом случае в задаюший контур генератора включаются обмотки 4-2, а во втором - обмотки 5-3. Частоты на выходе генератора равны соответственно Д и fz- В преобразователе они преобразуются в соответствующие числа импульсов N- и Л/2- При движении сердечника внутрь обмоток 5-3 имеем
N а, (х, - изм) + ( - ) + p
TV, г и. (х, -f л„зм) + bi (х, + л:„з„) + Cf.
Числа импульсов NI и N2 поступают в блок 18, где вычитаются, а результат вычитания запоминается. Полученн1ая разность
N N,-N, + 2biX, 2л:„з„-(2л:,-а; + 6,.)
является результатом первого такта измерения и соответствует измерению входного перемещения дифференциальным индуктивно-частотным датчиком, состоящим из последовательно соединенных идентичных обмоток 4-2 и 5-3.
Во втором такте блок управления открывает диод 12, обеспечивая тем самым подключение к генератору вывода, общего для обмоток 2-5
и 3-6. При открытом диоде 12 проводят два .последовательных измерения; сначала с открытым диодом /О, затем с открытым диодом 14. При этом в первом случае в контур генератора включаются обмотки 2-5, во втором - обмотки 3-6.
Такое переключение обмоток эквивалентно изменению в противоположных направлениях положения якоря относительно обмоток 4-2 и
5-3 на величину, соответствующую известному значению перемещения А, равную длине вспомогательной обмотки.
Теперь частоты на выходе генератора равны соответственно /з и /4. В блоке 17 они иреобразуются в соответствующие числа импульсов yVa и
NS ai (л;„ - лг„зм + Д) + bi (х - х„ + А) -f Cj, Nt ui (Xg + лгизм - Д) + bt ( - A) + с/
Числа импульсов Лз и N поступают в блок 18, где вычитаются, а результат вычитания запоминается. Полученная разность
N -., 2 (л:„зм - А) (2aiX, + b)
является результатом второго такта измерения и соответствует измерению входного перемещения дифференциальным индуктивно-частотным датчиком, содержащим последовательно соединенные идентичные обмотки 2-5
и 3-6.
Решая совместно приведенные выражения, будем иметь
- л
Этот алгоритм реализуется блоком вычитания. Длина вспомогательных обмоток выбирается такой, чтобы точки /i-/4 на характеристике / (х) находились в пределах i-ro участка
аппроксимации. В этом случае параметры а,;, bi, c,const иа участке хо- -Хазм, Хо-.изм. Результат измерения фиксируется регистратором. Конечный результат измерения не зависит
д, стабильности параметров а;, bi, Ci функции преобразования. Точность измерения определяется только степенью идентичности обмоток, точностью величины А и точностью апшроксимации рабочего участка характеристики преобразоватеЛЯ. Время измерения шм выбирается намного меньше периода изменения входного перемещения. Поэтому с достаточной степенью точности режим измерения можио считать статическим, т. е.: л:изм сопз1 и )зм.
Предмет изобретения
Устройство для измерения линейных перемещений, содерл ащее (ферромагнитный якорь, помещенный внутри немагнит1ного цилиндра, на котором расположены контурная и вспомогательные обмотки, причем контурная обмотка расположена между вспомогательными обмотками, подключенные через конденсаторы
и диоды к блоку управления и к задающему контуру генератора, выход которого через преобразователь и блок вычитания подключен к регистратору, отличающееся тем, что, с целью повышения точности работы устройства,
в нем на одном конце немагнитного цилиндра установлены дополнительные контурная и вспомогательная обмотки, подключенные через конденсаторы и диоды к блоку управления и задающему контуру генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный преобразователь линейных перемещений | 1985 |
|
SU1254286A1 |
| ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU340892A1 |
| УСТРОЙСТВО ДВУХПАРАМЕТРОВОГО КОНТРОЛЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ПОКРЫТИЙ | 2013 |
|
RU2533756C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| Управляемый измерительный генератор | 1983 |
|
SU1109851A1 |
| Устройство для реостатно-рекуперативного торможения тяговых двигателей электроподвижного состава | 1980 |
|
SU919909A1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Устройство для измерения сопротивления изоляции цепи ротора бесщеточной синхронной машины | 1982 |
|
SU1112312A1 |
| ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2163350C2 |
изг
19
18
77
