Фиг.1
4 Ю
СО
входом счетчика 2 и первыми входами реверсивного счетчика 3 и устройства 4 запоминания фазы. Выход счетчика 2 соединен с входом преобразователя-корректора 5 кодов. Выход преобразователя-корректора 5 кодов соединен с входом ЦАП 6, первый, второй и третий выходы ЦАП 6 соединены соответственно с первым, вторым и третьим входами датчика 7, предназначенного для модулирования фазы в зависимости от измеряемого перемещения, выход которого соединен с первым входом фазового
компаратора 9 и вторым входом устройства 4 запоминания фазы. Выход устройства 4 запоминания фазы соединен с вторым входом фазового компаратора 9, первый выход которого соединен с третьим входом устройства 4 запоминания фазы, а второй и третий выходы соединены соответственно с вторым и третьим входами реверсивного счетчика 3. Повышение точности достигается путем внесения предварительных корректирующих сигналов в сигналы питания датчика 7.1 з.п. ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования величины деформации проводника при сварке давлением | 1988 |
|
SU1574405A1 |
| Программно-управляемый генератор синусоидальных колебаний | 1986 |
|
SU1460768A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
| Преобразователь кода во временной интервал | 1986 |
|
SU1410279A2 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| Устройство измерения перемещения | 1982 |
|
SU1334045A1 |
| Устройство демодуляции телевизионного сигнала системы Секам | 1989 |
|
SU1688458A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ФОРСИРОВКОЙ И КОРРЕКТОРОМ ПАРАЛЛЕЛЬНОЙ РАБОТЫ | 2023 |
|
RU2811685C1 |

Изобретение относится к измерительной технике. Цель.изобретения - повышение точности и увеличение скорости измерения. Устройство, содержащее генератор 1 опорных импульсов, счетчик 2, фазовый датчик 7 и компаратор 9, снабжено преобразователем-корректором 5 кодов, цифроаналоговым преобразователем (ЦАП) 6, устройством 4 запоминания фазы и реверсивным счетчиком 3. Причем выход генератора 1 опорных импульсов соединен с
Изобретение относится к измерительной технике и может быть использовано при измерении перемещений в канале атомного реактора.
Известно устройство для измерения перемещений, содержащее генератор опорной частоты, аппрок симатор, формирующий напряжение питания датчика, в качестве которого используется сельсин или индуктосин, работающий в режиме фазовращателя, формирователь тактовых сигналов, управляемый делитель, предназначенный для формирования импульсов с частотой, равной частоте сигналов датчика, импульсно-фазовый дискриминатор, формирующий сигнал, длительность которого равна разности фаз сигналов датчика и управляемого делителя, устройство усреднения и управления коэффициентом деления управляемого делителя, изменяющее частоту следования импульсов на входе управляемого делителя, реверсивный счетчик, подсчитывающий тактовые импульсы за время прохождения сигналь, и импульсно- фазовый дискриминатор. Работа описанного устройства основана на преобразовании механического перемещения в изменении фазы электрического сигнала. Однако в устройстве не предусмотрена коррекция нелинейности характеристики датчика, что снижает точность его работы, особенно в условиях канала атомного реактора.
Наиболее близким к предлагаемому решению по технической сущности и достигаемому эффекту является устройство для измерения перемещений, содержащее генератор опорных импульсов, счетчик, индуктивный датчик, фазовый компаратор.
Описанное устройство не может быть использовано для измерения перемещений в условиях радиационного воздействия, поскольку применяемый для этой цели датчик имеет нелинейную зависимость изменения
фазы выходного сигнала от измеряемого перемещения, что существенно снижает точность измерений. Кроме того, быстродействие устройства ограничено
тем, что в нем перемещение измеряется в течение половины периода выходного сигнала датчика, т.е. если измеряемое перемещение за время половины периода сигнала превысило половину периода, то измерение
перемещения возможно только во втором периоде выходного сигнала датчика, что увеличивает время измерения вдвое.
Цель изобретения - повышение точности и быстродействия измерения за счет
внесения предварительных корректирующих сигналов в питание индуктивного датчика.
На фиг.1-3 изображены схемы реализации соответственно устройства, блока запоминания фазы и примера фазового компаратора; на фиг.4 - временные диаграммы, поясняющие работу устройства. Устройство измерения перемещений
содержит (фиг.1) генератор 1 опорных импульсов, выход которого соединен с входом счетчика 2 и первыми входами реверсивного счетчика 3 и блока 4 запоминания фазы. Выход счетчика 2 соединен с входом преобразователя-корректора 5 кодов. Выход преобразователя-корректора 5 кодов соединен с входом цифроаналогового преобразователя 6 (ЦАП). Первый, второй и третий выходы ЦАП 6 соединены соответственно с первым,
вторым и третьим входами индуктивного датчика 7, выход которого соединен с входом амплитудного компаратора 8. Выход амплитудного компаратора 8 соединен с первым входом фазового компаратора 9 и
вторым входом блока 4 запоминания фазы. Выход блока 4 запоминания фазы соединен с вторым входом фазового компаратора 9, первый выход которого соединен с третьим
входом блока 4 запоминания фазы, а второй и третий выходы соединены соответственно с вторым .и третьим входами реверсивного счетчика 3.
Блок 4 запоминания фазы содержит (фиг.2) счетчик (периодов измерения) 10, выполненный в виде RS-триггера. Первый выход счетчика 10 соединен с первыми входами первого 11 и второго 12 управляю- щих вентилей. Второй выход счетчика 10 подключен к первым входам третьего 13 и четвертого 14 управляющих вентилей. Выход вентиля 11 соединен с первым входом первого счетчика-делителя 15, выход кото- рого соединен с вторым входом четвертого вентиля 14. Выход третьего вентиля 13 соединен с первым входом счетчика-делителя 16, выход которого подключен к входу второго вентиля 12. Выходы второго 12 и чет- вертого 14 вентилей соединены соответственно с вторым и первым входами пятого вентиля 17. Первым входом блока 4 являются вторые входы счетчиков-делителей 15 и 16. Вторым входом блока 4 являют- ся вторые входы вентилей 11 и 13. Третьим входом блока является вход счетчика 10. Выходом блока 4 является выход пятого вентиля 17.
Фазовый компаратор 9 (фиг.З) может содержать схему ИЛИ 18, счетный триггер ТТ 19, схему И-1 20,схему И-2 21 и RS - триггер 22. При этом выход схемы ИЛИ 18 соединен с входом счетного триггера ТТ 19, а выход триггера 19 подключен к первым вхо- дам схем И-1 20 и И-2 21. Первый и второй входы фазового компаратора подключены соответственно к входам S и R триггера 22 и к входам схемы ИЛИ 18. Выходы RS-триг- гера 22 Сг+ и Сг подключены к вторым вхо- дам соответственно схемы И-1 20 и схемы И-2 21.
Устройство работает следующим образом.
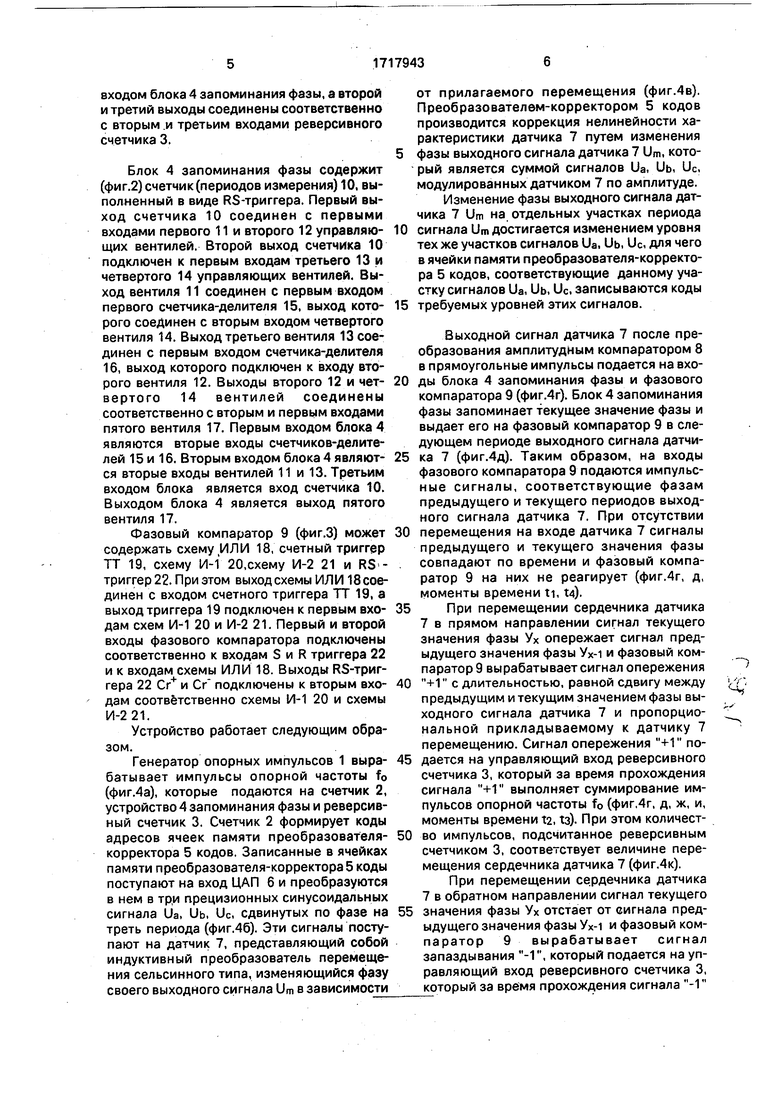
Генератор опорных импульсов 1 выра- батывает импульсы опорной частоты f0 (фиг.4а), которые подаются на счетчик 2, устройство 4 запоминания фазы и реверсивный счетчик 3. Счетчик 2 формирует коды адресов ячеек памяти преобразователя- корректора 5 кодов. Записанные в ячейках памяти преобразователя-корректора 5 коды поступают на вход ЦАП 6 и преобразуются в нем в три прецизионных синусоидальных сигнала Ua, Оь, Uc, сдвинутых по фазе на треть периода (фиг.4б). Эти сигналы поступают на датчик 7, представляющий собой индуктивный преобразователь перемещения сельсинного типа, изменяющийся фазу своего выходного сигнала Um в зависимости
от прилагаемого перемещения (фиг.4в). Преобразователем-корректором 5 кодов производится коррекция нелинейности характеристики датчика 7 путем изменения фазы выходного сигнала датчика 7 Dm, который является суммой сигналов Ua, Ut, Uc, модулированных датчиком 7 по амплитуде. Изменение фазы выходного сигнала датчика 7 Um на отдельных участках периода сигнала Um достигается изменением уровня тех же участков сигналов Ua, Ut, Uc, для чего в ячейки памяти преобразователя-корректора 5 кодов, соответствующие данному участку сигналов Ua, Ub, Uc, записываются коды требуемых уровней этих сигналов.
Выходной сигнал датчика 7 после преобразования амплитудным компаратором 8 в прямоугольные импульсы подается на входы блока 4 запоминания фазы и фазового компаратора 9 (фиг.4г). Блок 4 запоминания фазы запоминает текущее значение фазы и выдает его на фазовый компаратор 9 в следующем периоде выходного сигнала датчика 7 (фиг.4д). Таким образом, на входы фазового компаратора 9 подаются импульсные сигналы, соответствующие фазам предыдущего и текущего периодов выходного сигнала датчика 7. При отсутствии перемещения на входе датчика 7 сигналы предыдущего и текущего значения фазы совпадают по времени и фазовый компаратор 9 на них не реагирует (фиг.4г, д, моменты времени ti, 14).
При перемещении сердечника датчика 7 в прямом направлении сигнал текущего значения фазы Ух опережает сигнал предыдущего значения фазы Ух-1 и фазовый компаратор 9 вырабатывает сигнал опережения +1 с длительностью, равной сдвигу между предыдущим и текущим значением фазы выходного сигнала датчика 7 и пропорциональной прикладываемому к датчику 7 перемещению. Сигнал опережения +1 подается на управляющий вход реверсивного счетчика 3, который за время прохождения сигнала +1 выполняет суммирование импульсов опорной частоты f0 (фиг,4г, д, ж, и, моменты времени t2, Хз). При этом количество импульсов, подсчитанное реверсивным счетчиком 3, соответствует величине перемещения сердечника датчика 7 (фиг.4к).
При перемещении сердечника датчика 7 в обратном направлении сигнал текущего значения фазы Ух отстает от сигнала предыдущего значения фазы Ух-1 и фазовый ком- паратор 9 вырабатывает сигнал запаздывания -1, который подается на управляющий вход реверсивного счетчика 3, который за время прохождения сигнала -1
выполняют операцию вычитания импульсов опорной частоты. При этом количество импульсов соответствует величине перемещения сердечника датчика 7.
Таким образом, на выходе реверсивного счетчика 3 непрерывно формируется код, соответствующий текущему положению сердечника датчика 7 перемещения.
Фазовый компаратор 9 (фиг.З) работает следующим образом.
На вход фазового компаратора 9 подаются импульсные сигналы (фиг.4) сигнал Ух с датчика 7 перемещения и сигнал У0 с устройства запоминания фазы. Если сигнал Ух приходит раньше, чем У0, то RS-триггер 22 вырабатывает сигнал Сг+, а счетный триггер 13 устанавливается в состояние разрешения счета. При этом на выходе схемы Й-1 20 формируется сигнал разрешения Сг+. В момент прихода сигнала Уо счетный триггер 19 снимает сигнал разрешения счета РсЛ а RS-триггер 22 устанавливается в состояние Сг. При этом выходные сигналы Сг и Сг отсутствуют.
При приходе первым сигнала Уо на вход фазового компаратора 9 счетный триггер 13 устанавливает сигнал Per, а на выходе RS- триггера остается сигнал Сг. При этом на выходе схемы И+2 21 устанавливается сигнал разрешения Сг. При приходе сигнала Ух на вход фазового компаратора 9 триггер 19 снимает сигнал Per, a RS-триггер 22 устанавливается в состояние Сг+ . При этом на выходе фазового компаратора 9 сигналы Сг и Сг отсутствуют.
Увеличение скорости измерения обеспечивается применением устройства и запоминания фазы совместно с фазовым компаратором 9. Такая схема позволяет, в отличие от прототипа, измерять за время периода выходного сигнала датчика 7 перемещение, соответствующее сдвигу фазы выходного сигнала датчика 7, близкого по величине периоду выходного сигнала датчика 7.
По сравнению с прототипом предлагаемое решение позволяет повысить точность измерения перемещений (деформаций) образца при испытаниях в канале атомного реактора за счет внесения предварительных корректирующих искажений в сигналы питания индуктивного датчика.
Фо рмула изобретения
преобразователем-корректором кодов и цифроаналоговым преобразователем (ЦАП), блоком запоминания фазы и реверсивным счетчиком, выход генератора опорных импульсов соединен с входом счетчика и первыми входами реверсивного счетчика и блока запоминания фазы, выход счетчика соединен с входом преобразователя- корректора кодов, первый, второй и третий
выходы ЦАП соединены соответственно с первым, вторым и третьим входами индуктивного датчика, выход которого соединен с первым входом фазового компаратора и вторым входом блока запоминания фазы,
выход блока запоминания фазы соединен с вторым входом фазового компаратора, первый выход которого соединен с третьим входом блока запоминания фазы, а второй и третий выходы соединены соответственно с
вторым и третьим входами реверсивного счетчика.
заполнения фазы являются объединенные вторые входы счетчиков-делителей, вторым - второй вход первого вентиля, третьим - вход счетчика, а выходом - выход пятого вентиля.
ФИГ. 2
tt
tz Јi
о) t°
т
5) (Jo. u&
/c
У
1
I
1
л
n
Ј
fs,tt
L:
2
i
я.
U-J
an
Фиг. 4
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 915530, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
