t, ,,. P ,;-, - . 4:; ц,:;, i h; j u :.i ;...;; ле:.-: крнXCliE .-; С VCbiO ЛП ГПМ . Я фП . бгНЖсч.мд ;:i;;TfKibi ;;то ;гтичг,;у:01 о пс;Л1Ировыжч; к;; (Ьи ;|1;ги.|:Ий. гричепс гп С;.: .: иг .к;; ГГ. ;;f .)5aП Я Осз VM.V :;:; VHJ : ;:т. у .кыТх - -лсггтсо fiMiiv гьсов: ::-;i . 1 :Tr9 -;u:;r-;i ib f:iK : :|сктппче-::сая лгмт o;i.:- i-i-i и.: ciafivie. per, чк stpn вк i::- ::Cii : О чгли Т ч-:; грех ncj;::ipo
;;:iilirbl CiKKrXS
OiiTiirj. p ;;:::;: pjfojb |ояучекнс мэкси si/iifcijni; JHLV. у.мдрй co.ijiiiTcs при гт;олче
(кр1- 01:т Н1;М -: brir. .
L; ,Г-:Г; :3с UC;i« :i3 J; 6j:r. I Ир Н-ГЛГН: С N-J:
,-i(i-«-, п(ло;;с г1И; KpiiPOii i-ia в N-iti;v;e i; у;п; Н при ilOiTyXtnTiii чГС екТрНКГ l iup f.-:O:;OiO:.: Й:;;... .ii;: j;}-:.ov;iB;icHiK и iii;a-jc ;r 0:0 ( ;тгтруж ;п ч п Tier- runii ; :;iBc;ai ; bixo;jy -кп-х уд;гной M;iu; iHW и:, оггт- ;-,.ьно Vi -iMu iiiOoTv (;:СТ1Ожс-Ис ll а. 5): при с)т:1гч;зсн.нс ,.lOicii ;г 13гиЕ -лирз и. ,HO, г;;ОРОСъ пг -женнр c;iaii или эффект т;лог;;сш-:я .
-Более экономичной к зффектавной является йстройка машин 31иброударного действия регулиованием оборотов двигателей на опглг ильный ежим работы. Пре/уигаемая схема при такой а&тоатической настройке машин позволяет получить аксимально возможную энергию удара в процессе аботы машины независимо от изменения грунтовых словий и случайных колебаний управляющего оздействия в це1Ш силовых электродвигателей.
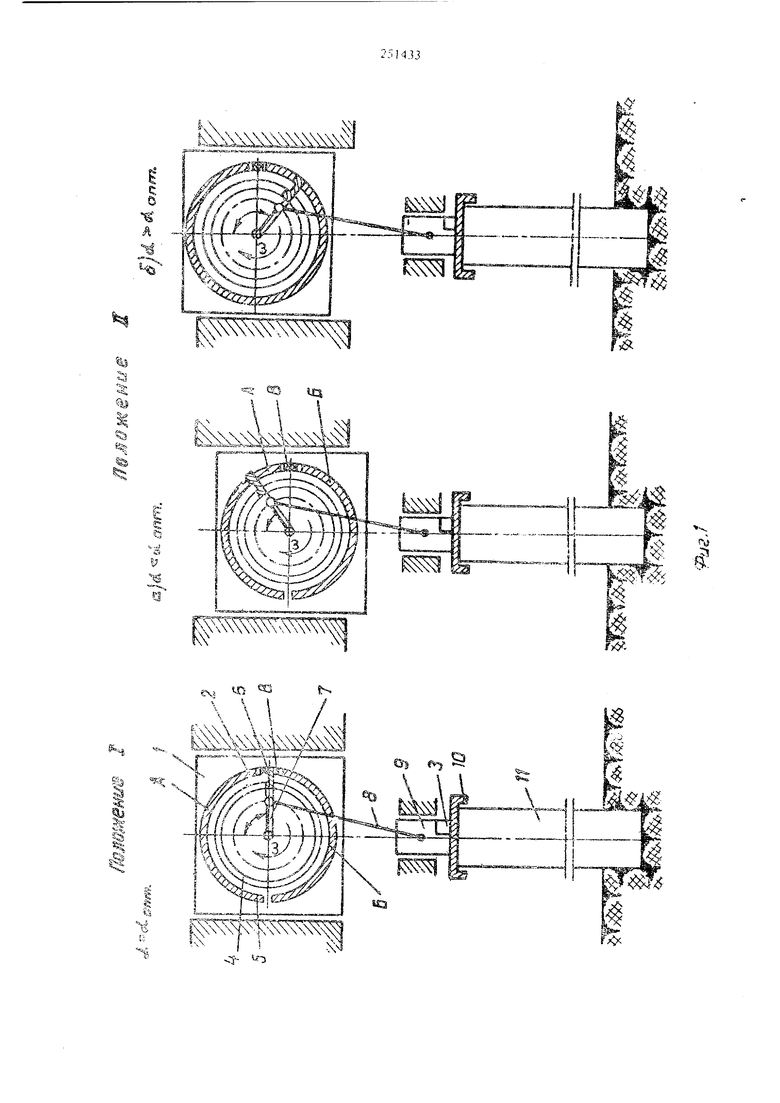
На массе 1 устанавливают распределитель 2 мпульсов, поступающих с датшка 3 момента дара рабочего органа, Распрсде/штедь и fIIyльcoй остоит из устанавливаемь х неподвижно на машине изолированных токопроводдших сплошного и разрезного колец 4 и 5 и скользяп его по ним подвижного контакта 6, который крепится на эксцентриковом или дебалансном валу так, что контакт, скользящий при вращении вала по разрезному колы.у- 5, вьшолнениому в виде отдельных секторов, контактирует с этим кольцом строго в соответствии с положением эксиентриковой части эксцентрикового, вала (кривоо.тпа) 7. Указанный датчик момента удара рабочегооргана о сваю или грунт, срабатывающий в момент начала удара, может устанавливаться непосредственно на массе 1, на одатуне 8, на порпгне-ударнике 9,рабочей площадке вибротрамбующей лашипы или наголов1шке 10, устанавливаемом обычно на сваю 11 при ее погружении в грунт. Сигнал, поступающий с датчика 3 момента удара в момент удара рабочего органа, проходах через сплоппюе кольцо 4 расггределительного устройства и тот ceKiOp разрезного кольца 5, с которь М сплощное кольцо в это время связано подвижным контактом б.
Как видно из приведенной схегчнл, в зависимости; от положения кривопимла сигнал будет сниматься
с сектора А, что соответствует исоптиматьно.... положению крино -ла в момент удара, ког; СЛ. .,i,i (положение На; в этом слЛчае необходимо увеличить .рам э.чектродв1 гателей);
с сектора Б, что также соответствует кеоптимальному положению кривопшпа в моме}тт удара, когда Cv 13(,Дположение И б; в этом необходимо уменыш1ть обороты силовых электро .двигателей машины);
сигнал не пропускается вообще или сьшмается с сектора ( юны нечувствительности) В, чю (Соответствует оптимальному положе1гою кривошипа 3 момент удара, когда oQ- . onivi.(f очень близ-, ко к равенству; в этом случае нет необходамости изменять обороты электродлигателей),
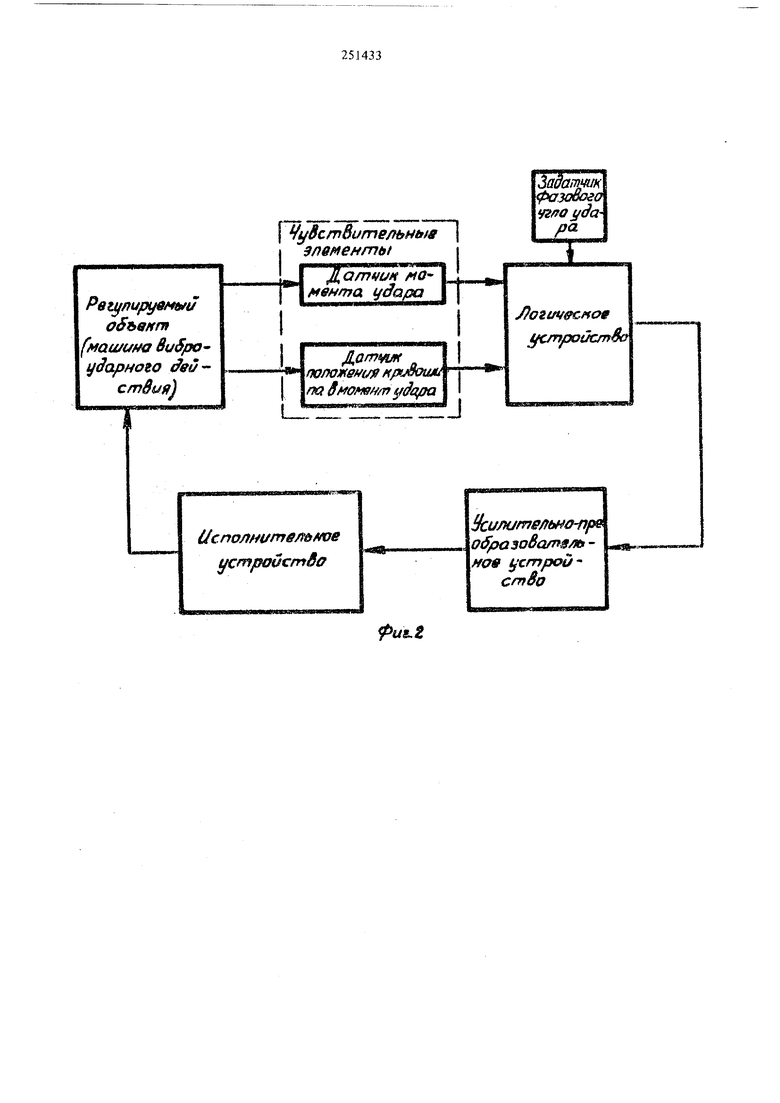
Блок-схема автомапческой системы управления, позволяющей настраивать машины виброудар-, ОТО действия на оптимальньгй режим работы, редставляет собой бло.с чувствительности .шементоз, состояши из датчика положения кривоimma в момент удара и датчика момента дара, - «торые выдают сигналы в логическое устройсто. Последнее ресшет об иэг 1епении обороов даигателей щш достижения оптимального поожениякривощипа в момент удара рабс)чего . При необходимости, изменения оборотов выаегся ж6 вётству)ощий сигнал в усилительтю-пребразовательное устройство, которое, воздействуя на исполнительное устройство, плавно изменяет обороты регулируемого объекта до требуемого эпаче}шя, обеспечивая максикальлую энергию утдара рабочего органа в процессе уплотнения грунта или погр окения в гртат сваи.
В варианте выполнения системтл автоматичесKoiO регз/лирова1шя без зонь нечувствительности у распределителя импульсов на сплошное кольцо распределите.пьного устройства, являющегося одновременно датчиком положения кривоппша и частью логического усфойства, подается напряжение о.гщого знака. На вход 12 с датщша 3 момента удара поступает при ударах сформироватагй импульс противоположного знака. Для обеспечения качества ре1улирования длительность импульса назначается мштмальной, достаточной лишь для надежного срабатывания погяризованного реле РП.
В том случае, когда сектор А распределителя 2 импульсов будет соединен со сшюцшым кольцом 4 i через вращающийся подвижный контакт 6, поступивший с датчика удара иа вход 12 ккпульс пройдет через К.j и Н j одтюй об.-5отки двухпозицйонного электромагнитного поляризованного реле РП.
При этом средний контакт поляризованного реле замкнется с контактом iPIT, включая ток в одну из обмоток возбуждения реверсивного двигателя Д. исполнитель,ного устройства. Двигатель после включения будет осуществлять врап,1еш1е в одном направлении до тех пор, пока средний контакт поляризованного реле РП не замкнется с правым контактом 2РП, включая при зтом ток в другую обмотку возбуждения даигателя. Это произо щет в том случае, когда сигнал с ,датП ка момента удара поступит на вход 12 в тот момент, когда вра цающ11Йся подвижный контакт 6 соеди шет сектор Б распределителя 2 импульсов со сплошным кольцом, ибо только в этом случае 11;лпупъс пройдет через Я , и К второй обмотки реле РП, при срабатывагши которого срепНИИ контакт перебросится во второе устойчивое положение, замыкаясь с правым контактом 2РП.
В зависимости от того, какие электродвигатели применяются для привода маишп виброударного действия (постоянного тока, асинхронные, с фазным ротором и т.н.), и от того, какой избран способ регулирования оборотов этих /шкгателей, исполш1тельный реверсивный дрлаатель может использоваться по-разно.му в различных схемах мля изменения упрйвл,(1ющего воэлействия.
ращении acHiixpoiiiibsxдвигателей) или управляюих обмотках магнитного усилителя (ирн регуировании с помои1ью маг11итно -о усияителя) двиатель Д (фиг. 3) используется в качестве нривода ля перемещения через редуктор 1 ползуна потениометра Д .
В зависимости от знака отклонения фа:юво10 угла удара от заданного сред1тй контакт двухнозиционного поляризованного реле РП замыкается с правым 2РП или левым 1РП тсонтакгом, Bknioчая ток либо в одну, либо в другую обмотку возбуждения двигателя Д. В результате этого полу- . чается либо одно, либо другое направлеьте движения ползунка поте1адаометра, а при этом плавно увеличивается или уменьшается ток управления, подаваемый на ут равлян)1цие обмотки дросселя насыщения или мапштното усилителя, чем и достигается плавное регулирование оборотов электродвигателей. Таким образом, система автоматическото регулирования производит корректировку оборотов электродвигателей на границе между секторами А и Б разрезного кольца распредеителя импульсов при выходе за пределы границы зоны В нечувствительности, т.е. обеспечивает оптимальный режим работы маижны виброударного дейт ствия удержанием фазового утла в процессе работы вблизи с задат ным (OHVVT.
В электрической схеме системы автоматаческого регулироваутя (фиг. 4) разрезное кольцо 5 распределителя импульсов может состоять из трех изо- Л1.фованнь х секторов А, Б и В, причем, длина сек- . тора Б назначается по расчету из условия of ecneчения отклонеый фактических.фазовмх углов удара с от задаваемого оит-гоо- допустимых пределах в границах зоны В ечувстЕительности. В схеме для коммутации обмоток двигателя Д исполгааельного устройства используются два двухпозиционных поляризованных реле РП и РП2, обмотки катушек которых соединены последовательно. Начало обмотки 1Н1 погт.ризоранного реле РП1 соешгнено с сектором .А, конец обмотки 2К2 поляризованного реле 1П2 - с сектором Б, а общая точка обмоток О соеданенз с сектором В. На сплошное кольцо 4 распре.целительного устройства подается напряжение, знак которого противоположен знаку импульса, поступающего с датчика момента удара через вход 12 на г;редт1е точки обмоток катуилек q и И. .
В том случае, когда сектор В распределителя импульсов будет coe;yiHeii с кольцом 4 через подвижный контакт 6, поступающий Ia вход 12 сформированнь|й датчиком импульс обеспечит прохождение ттка однорфеменно чере IJUMOTKH IK2 - 1Н2 реле Plli и обмотки 2НЛ - 2К1 реле РП2. При этом оба реле сраПогакл н средний контакт реле РП1 замкнет оОесточепиый контакт 1 РГП, а средний контакт реле РП2 замкнет обесточенный контакт 2 .
останавливается, П)екран.1ая и.змемсние оооротов силовых двигателей.
Распределитель импульсов устанавливается на маитине так, чтобы осевая линия S - о , п|юходяшая через серешщу сектора В, находилась в положении требуемого ( и„. До тех нор, пока импульсы с датчика момен а удара будут поступать на вход 12 и тот момент, ког,чэ вращаюЩ1шся скользящий контакт будет находиться в пределах сектора В, обороты силовых двигателей мащины будут оставаться неизменными.
При отклонении фазового утла удара (X от (А 0(1 ИИ iQо на веливдну, большую той, которая определяется заданной зоной нечу-вствительности. т.е. при поступлении импульса с датчика момента удара на вход 12 в тот момент, когда вращающийся скользящий контакт буиет находиться в зоне сектора А или Б, происходит замыкание одной или другой обмотки возбуждении двигателя Д и соответствующая корректт1ровка оборотов эксцентрикового вала машины до тех пор, пока не будет обеспечиваться фазовый угол удара (А. в границах, определенных зоной нетувствительности.
При поступлешга импульса на вход 12 в тот момент, когда скользящю контакт находится в зоне сектора А, ток проходит через обмотку первой кагушки двухпози1щонного поляризованного реле РП1 в направлении Н1-1К1, заставляя средний контакт замкнуться с контактом 2РП1, включая при этом одну из обмоток возбуждения двигателя Д.
При поступле ши (при выходе из границ зоны нечувствительности) импульса с датчика момента удара на вход 12 в нахождения скользящего контакта в зоне сектора Б ток проходит по обмотке первой кат}1ш и поляризованного реле РП2 в направлешти 2И1 - 2К1. При этом срехший контакт замыкает контакт 1РП2, включая другую обмотку реверсивного двигателя испо.тпщтельного устройства.
Формула изобретения
1. Устройство ДЛ.Я автоматического регулирования режима работы ма1пины внброударного действия, содержащее датчик момента удара и поляризованное реле, управляющее cncTeMovi питания силового двт гателя машины, отличающееся тем, что, с целью обеспечения оптимального режима работы машины, оно выполнено с распределителем импульсов, содержащим два неподвижных контактных кольца, одно из которых выполнено в виде отдельных секторов, и скользя дий контакт, связанный, например, с эксцентриковым валом маншны, причем секторы первого контактного кольца соелипены с концами обмоток поляризованного реле, а между общей точкой обмоток реле и вторым контактным кольцом включен датчик момента удара.
2. Устройство по п. I, отлй йшщеесйющих подяризованвнх реле, концы которых
Тем, что, разрезное кольцо распределителя, импуль-соединены е третьим сектором, а мелсду обмшмп
сов выполнено е тремя секторами, прзгчем дваточка да поляризованных реле и сгиюцпйтм коиКЗ них соединены с началами обмоток. CooTetrdffiv-тактным кольцом включ к датчик момента joiapa.
е IS
%5
S3
- «i.
«И
;Т ч.
t;
I; ч1

еч. Ш
1
.г
t §5
3f
.„.,,
I
ЧуВстВитвльныа элементы
LJ Д МО Л
Mi:y...r
«
ГЮЛО}КвН(Н1.
/Ж1 d fOMeffmy GflQ
Ucno/tMtftrte/fdffoe устройство
Задатчик фазового удаР
J)oif/V9C Oe
1 стрзйство
(jxjSowu. идала I
Уси/HjmeftbHO-np о раэоВа/ns/ нов устрой ст8о
«8.2