,(
Известно устройство для контроля не- | равномерности вращательного движения и . кинематической погрешности зубчатого зацепления, содержащее базу для установки контролируемых колес, два прибораs для измерения неравномерности вращения этих колес, каждый из которых включает установленный на одном валу с измеряемым колесом магнитный диск с магнит ной голсизкой и демодулятор, воспринимаю- IQ щий сигналы магнитной головки и волновой генератор, днфференииаль ное устройство, запирающий вентиль и: формирователь импульсов, а также блок сравнения, вход которого связан с демо- ь дуляторами упомянутых приборов, а выход - с анализирукшей и регистрирующей аппаратурой. . Для расширения диапазона измерения 20 и повышения точности измерения в предлагаемом устройстве каждый демодулятор содержит последовательно соединенные преобразователь формы сигналов, широт
V нижш&с частот и интеграт выход кото рого подключен к блсжу сравнения.
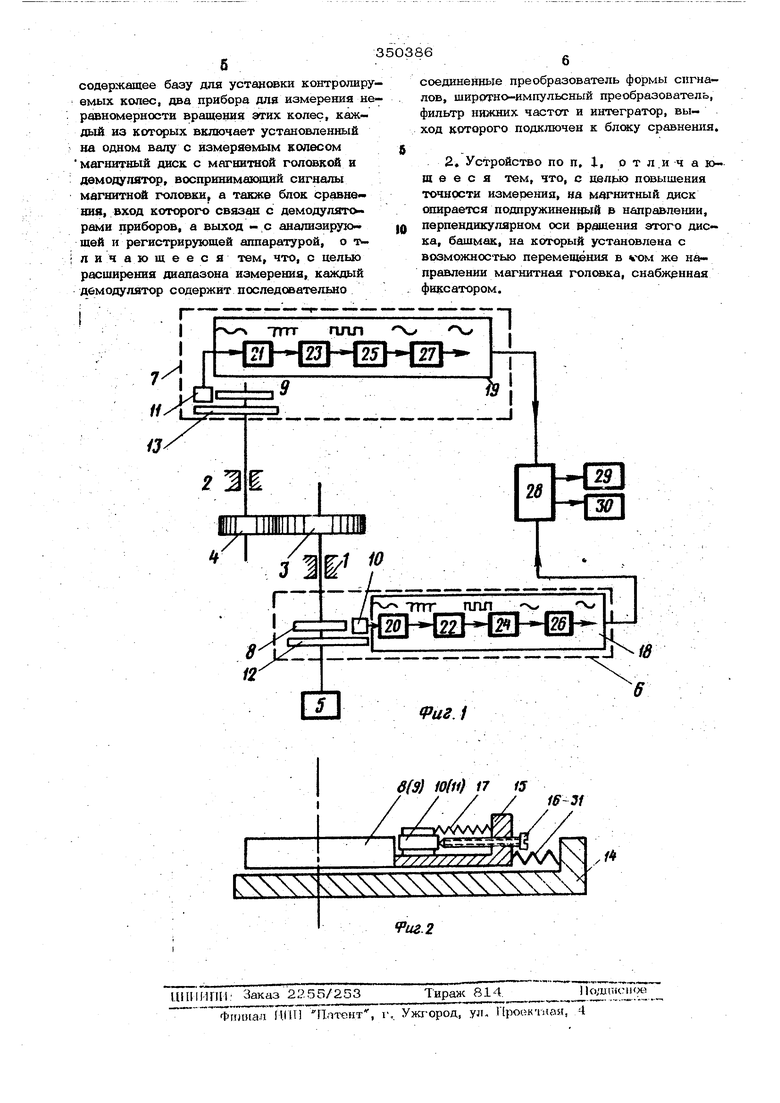
Кроме того, на магнитный диск опирается башмак, подпружиненный в направлении, перпендикулярном оси вращения этого диска. На башмаке установлена с возможностью перемещения в том же направлении магнитная головка, снабженная фиксат : ом.
На фиг, 1 изображена блок-схема предлагаемого устройства; на фиг. 2 - система установки и поддержания постоянного зазора между магнитной и диском.
База устройства включает станину (не показана) и шпиндельные узлы 1 и 2, обеспечивающие установку измеряемых шестерен 3 и 4 с широким диапазоном передаточных отношений и межценировых расстояний. Один из шпиндельнь:х у:злив связан с приводом 5 и редуктором, обеспечивающим варьирование скорости вращения в пределах, определяемых требованиями механической и элэктронной частей устройства, что позволяет использовать стандартную анализирующую и регистрирующую аппаратуру. Наличие базы и привода дает возможность проверять изолированные пары шестерен до установки их в. агретат. Устройство содержит приборы 6 и 7 для измерения неравномерности вращения, каждый иа включает предв ительно разделенные с требуемой точностью и частотой ма нйтные диски 8 и 9 соответственно, установленные на одном валу с соответствующей шестерней, магнитные гопавка 1О и 11, снабженные системами 12 н 13 лая установки и поддержади постоянного зазора между мшнит HbiMJH-гояовк« 4Н до и 11 и дисками 8 и 9. Эта система «одержит устан(юленное на одш}м шшияеяв с дисками 8 и 9 не подвижное оснсжадае 14, на которсяд с возможностью радиАрьного перемещения смонтирован подпружиненный в направлении, .ерп«й;мй(Улярном оси вращения диска, бащмв 15 на устансшлвна с возмсишо тыб перемещения в том же направлении., магнитная головка 10 (11), снабженная фиксатором, состоящим из вин та 16 и пружины 17. Система обеспечивает регулировку и большую стабильность в процессе измерения зазора между .магнитной голсюкой и магнитным сдоем, что позволяет, уменьшив указанный зазор, считъюать сигнал большей интенсивности с весьма низким плаванием амплитуды. В каждый из приборов 6 и 7 вход1ат демодуляторы 18 и 19 соответственно, обеспечивающие выделение неравномерности вращения соогюетствухмце пЗ шпинделя. Каждый демодулятор содержит последов тельно соеданённые преобразователи формы сигнала 2О и 21, широтно-имцу льсные преобразователи 22 и 23, фильтры нижних частот 24 и 25 и интеграторы 26 и 27, выходы которого подключены к блоку сравнения 28 нераьцомерностей вращения ведущей и ведомой шестерен. К выходу блока сравнения 28 подключе на анализирующая 29 (например, гармонический анализатор) и регистрирующая ЗО (например, самситисец) аппаратура, с помо щью которой мо}кет исследоваться как пог рещностьпередачи, так и неравномерность враще н(ия любого из валов (при отклк чении сигнала с другого вала). Устройство работает следующим образом. 86 го зазора между головкой и диском. В процессе измерения установленный зазор поддерживается постоянным, так как пружина 31 обеспечивает перемещение башмшса, . совместное с радиальными перемещениями периферийной поверхности диска в области крепления магнитной головки. При включении привода высокочастчу ные сигналы, мо дулированные по фазе неравномерностнми вращения , считываются с соответст вующих дисксе 8 и 9 магнитными головками Ю и 11 и передаются на входы демодуляторе 18 и 19. На входе демодулятора 18 получаем сигнал, пропорциональный неравномерности вращения ведущего вала, т.е. HepaBHiMviepHocTb привода, а на выходе демодулятора 19 - сигнал, пршюрциональный неравномерности вращения веденного вала, т.е. сумму пот решностей привода и исследуемой передачи. Эти сигналы сснюставляют ся в блоке сравнения 28, на выходе которого имеем сигнал, прогорш1оналы1ый пог решности передачи, который затем поступает на анализирующую 29 и регистрирук щую ЗО апп фатуру., -йемодулат 4-8-действует следуктаим образом. С магнитной головки 1О на преобразователь формы сигнала 20 поступает высокочастотный сигнал, модулированный по фазе неравномерностью вращения ведущего вала. В преобразюателе форК1Ы сигнала формируется импульс, соогпветствующий каждому магнитному делению диска 8 Этот импульс запускает щиротно-импульсный преобразователь 22, например, одностабильный мультивибратор, вырабатывающий прямоугольный импульс определенной длительности. В результате на вход фильтра нижних частот 24 поступает последовательность прямоугольных импульссв, модулированных по ширине неравномерностью вращения ведущего вала. Пропустив этот сигнал через фильтр низких частот 24 и интегратор 26, получают сигнал, пропорциональной погрешности вращения ведущего вала. На выходе интегратора 27 получают аналогичный сигнал, посту- пивщий с ведомого вала. Оба сигнала поступают на блок сравне ния 28, на выходе которого получают , пропорциональной погрешнсхзти передЬчи.
содержащее базу дла установки контролируемых колес, два прибора для измерения неравномерности вращения этих колес, каждый из которых включает установленный на одном валу с измеряемым колесом магнитный диск с магни-гаой головкой и демодулятор, воспринимающий сигналы магнитной , а также блок сравне« 1ШЯ, вход которого связан с демодулято рами приборов, а выход - с анализирую щей и регистрирующей аппаратурой, о т ли чающееся тем, что, с целью расширения диапазона измерения, каждый демодулятор содержат последовательно
соединенные преобразователь формы сигналов, ширртно-импульсный преобразователь, фильтр нижних частот и интегратор, выход которого подключен к блску сравнения.
2. Устройство по п, 1, о т л.и ч а а е с я тем, что, с повышения точности измерения, на м чгнитный диск опирается подпружиненный в направлении, перпендикулярном оси вращения этого диска, башмак, на коггорый установлена с возможностью перемещения в VOM же направлении магнитная головка, снабжэнная фиксатором. Риг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания редуктора привода лифта | 1976 |
|
SU616554A1 |
| Устройство для контроля относительной скорости механизмов | 1978 |
|
SU734790A1 |
| Устройство для измерения нестабильности частоты вращения вала | 1984 |
|
SU1210100A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1973 |
|
SU451901A1 |
| Многоканальный автономный прибор для исследования скважин в процессе бурения | 1981 |
|
SU983261A1 |
| Стенд для исследования динамики транспортных машин | 1984 |
|
SU1219934A1 |
| СТЕНД ДЛЯ АКУСТИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕКТРОМЕХАНИЧЕСКОГО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2610846C1 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| Универсальное устройство для измерения динамических характеристик муфт | 1988 |
|
SU1596215A1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
tX
в(9) Ю(И) 17 15
16-31
74
