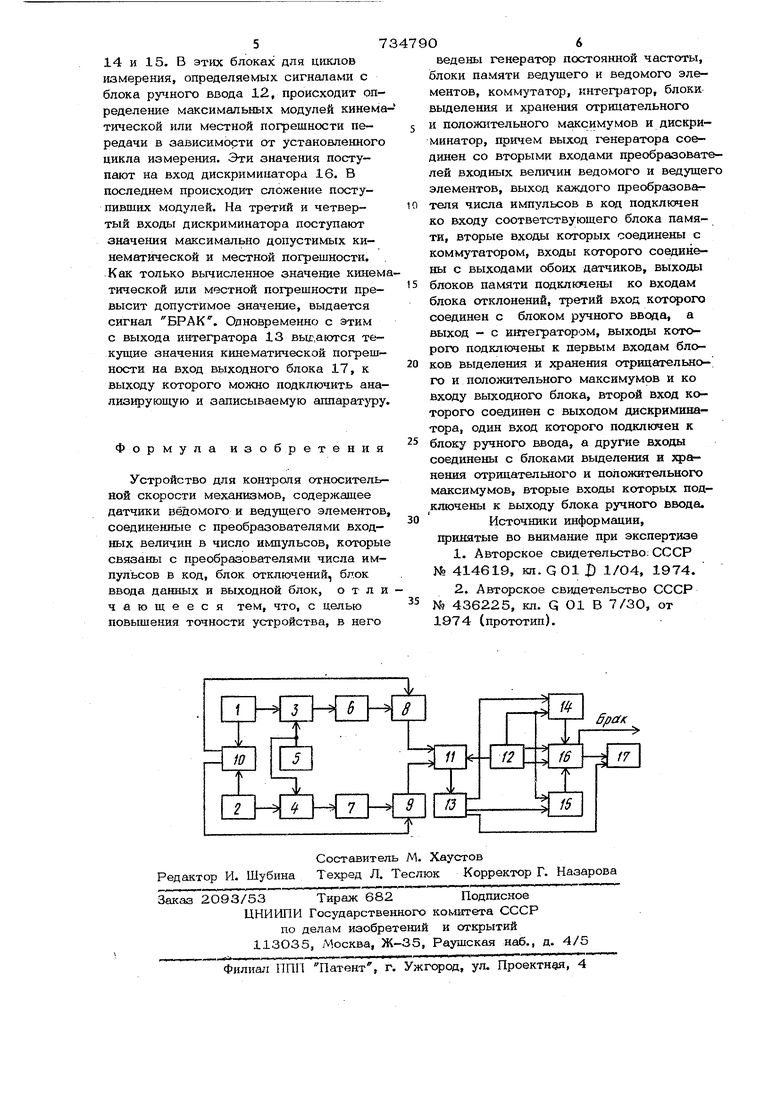
Изобретение относится к области конт рольно-измерительной техники в машиностроении, в частности для контроля отно сительной скорости различных механизмо трансп(ртных средств и определения кинематической погрешности зубчатых пере- дач и редукторов. Известно устройство для контроля неравномерности вращательного движения и кинематической погрешности зубчатого зацепления, которое содержит демодуляторы, преобразователи формы сигнала, широтно-импульсные преобразователи, фильтры нижних частот, интеграторы, блок сравнения, анализирующую и регистрирующую аппаратуру l . Однако в этом устройстве не предусмотрен учет начальных фаз поступающих сигналов, поэтому точность его мала; кроме того, оно обладает недостаточным быстродействием.. Известен прибор для контроля кинематической погрешности зубчатых передач, содержащий датчики ведущего и ведомого элементов, фазометр, делитель частоты импульсов, блоки набора целой части передаточного отношения и его дробной части, распределительное устройство с логической схемой И и ИЛИ и регистрирующее устройство 2. Точность измерения прибора мала, особенно при большом передаточном отношении ввиду того, что в фазометре происходит сравнение фаз сигналов, которые на самом деле снимаются в разные моменты времени. В связи с этим на выходе прибора будет функция, не соответствующая действительности при нестабильном приводе. Кроме того, в данном приборе валика погрешность дискретности, особенно при больших передаточных отношениях. Все это снижает точность устройства. Целью изобретения является повьпиение точности устройства, Это достигается тем, что в предлагаемое устройство введены генератор постоянной частоты, блоки памяти ведущего и ведомого элементов, коммутатор, инте- гратор, блоки выделения и хранения отри цательного и положительного максимумов и дискриминатор, причем вьрсод генерато ра соединен со вторыми входами преобра зователей входных величин ведомого и ведущего элементов, выход каждого преобразователя числа импульсов в код подключен ко Входу соответствующего блока памяти, вторые входы которых соединены с коммутатором, входы которого соединены с выходами обоих датчиков, выходы блоков памяти подключены ко , входам блока отклонений, третий вход которого соединен с блоком ручного ввода, а выход - с интегратором, выходы которого подключены к первым входам блоков выделений и хранения отрицательного и положительного максимумов и ко входу выходного блока, второй вход кото рого соединен с выходом дискриминатора один вход которого подключен к блоку ручного ввода, а другие входы соединены с блоками выделения и хранения отрицател ного и положительного максимумов, вторые входы которых подключены к вьгходу блока ручного ввода. На чертеже изображена схема предлагаемого устройства. Устройство содержит датчик 1 ведущего элемента, датчик 2 ведомого эле-мента, соединение соответственно с преобразователем 3 входных величин в число импульсов ведущего и с преобразова телем 4 входных величин в число импульсов ведомого элементов, входы которых связаны с генератором 5 постоя ной частоты, а выходы преобразователей 3 и 4 связаны соответственно с выходами преобразователя 6 числа имиул сов в код ведущего элемента и преобразователя 7 числа импульсов в код ведомого элемента. Выходы указанных преобразователей соединены соответственно с блоком памяти 8 ведущего элемента и блоком памяти 9 ведомого элемента, другие входы которых связаны с KOMMyi-aTopoM 10. Выходы блоков памяти 8 и 9 подключены к блоку отклонений 11, третий вход которого соед нен С блоком ручногх) ввода 12. Выход блока отклонений 11 связан с интегратором 13. Выходы H&rerparjJ-opa соединены со входами блоков 14 и 15 выделения и хранения отрицательного максимума и положительного MaKcHN-iyMa соответственно, входы которых соединены ct входами дискриминатора 16. ыход дискриминатора подклкучен ко ду выходного блока 17, Устройство работает следующим образом. Сигналы от датчиков 1 и 2, установленных на контролируемых механизмах, представляют собой временные интервалы, пропорциональные скоростям контролируемых механизмов. Эти интервалы поступают сЬответственно в преобразователи 3 и 4 входных величин в число импульсов ведущего и ведомого элементов. На другие входы указанных преобразователей поступают сигналы с генератора 5 постоянной частоты, и происходит заполнение сигнальных интервалов частотой генератора. Значения, полученные на выходе преобразователей 3 и 4, поступают соответственно в преобразователи 6 и 7 числа импульсов в код ведущего и ведомого элементов. В этих преобразователях происходит преобразование унитарного кода измеренных интервалов в код, удобный для запоминания информации, в частности в двоичный код. Значения с преобразователей 6 и 7 поступают соответственно в блоки памяти 8 и 9 ведущего и ведомого элементов. Причем в блоке памяти, относящемся к более медленному звену, хранится значение одного сигнального интервала, а в блоке памяти, относящемся к более быстрому звену, хранится столько значений сигнальных интервалов, сколько их успеет пройти за время, пока медленное звено пройдет один сигнальный интервал. Как только с датчика 2 (более медленное звено) поступит значение сигнального интервала, коммутатор 1О выдаст команду в блок памяти 9 и значение, записанное в блоке памяти 9, поступит в блок отклонений 11. Одновременно с этим из блока памяти 8 по команде от коммутатора 10 поступит в блок отклонений 11 значение, записанное в первой ячейке памяти блока 8. В блоке отклонений 11 происходит деление поступивших величин с требуемой точностью и вычитание из полученного результата теоретического пере- даточного отнощения, поступающего на вход блока отклонений 11 из блока ручного ввода 12. В результате получаЕСТСЯ мгновенные значения погрешности передачи. Эти значения поступают на вход интегратора 13, с выхода которого текущие значения погрешности со своимл знаками поступают на входы блоков 14 и 15. В этих блоках для циклов измерения, определяемых сигналами с блока ручного ввода 12, происходит оп ределение максимальных модулей кинем тической или местной погрешности передачи в зависимости от установленног цикла измерения. Эти значения поступают на вход дискриминатора 16. В последнем происходит сложение поступивших модулей. На третий и четвертый входы дискриминатора поступают значения максимально допустимых кинематической и местной погрешности. Как только вычисленное значение кинем тической или местной погрешности превысит допустимое значение, выдается сигнал БРАК, Одновременно с этим с выхода интегратора 13 вььс.аюгся текущие значения кинематической погрешности на вход вь1ходного блока 17, к выходу которого можно подключить ана лизируюшую и записываемую аппарат1фу Формула изо б р е т е н и я Устройство для контроля относитель ной скорости механизмов, содержащее датчики ведомого и ведущего элементов соединенные с преобразователями входных величин в число импульсов, которы связаны с преобразователями числа импульсов в код, блок отключений, бпок ввода данных и выходной блок, отли чающееся тем, что, с целью повышения точности устройства, в него ведены генератор постоянной частоты, блоки памяти ведущего и ведомого элементов, коммутатор, интегратор, блоки выделения и хранения отрицательного и положительного максимумов и дискриминатор, причем выход генератора соединен со вторыми входами преобразователей входных величин ведомого и ведущего элементов, выход каждого преобразователя числа импульсов в код подключен ко входу соответствующего блока памяти, вторые входы которых соединены с коммутатором, входы которого соединены с выходами обоих датчиков, выходы блоков памяти подключены ко входам блока отклонений, третий вход котсфого соединен с блоком ручного ввода, а выход - с интегратором, выходы которого подключены к первым входам блоков выделения и хранения отрицательного и положительного максимумов и ко входу выходного блока, второй вход которого соединен с выходом дискриминатора, один вход которого подключен к блоку ручного ввода, а другие входы соединены с блоками выделения и хранения отрицательного и положительного максимумов, вторые входы которых под- ключены к выходу блока ручного ввода. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство; СССР № 414619, кл. G 01 D 1/О4, 1974. 2.Авторское свидетельство СССР № 436225, кл. Q 01 В 7/30, от 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки и контроля работы сеялки | 1989 |
|
SU1662388A1 |
| Устройство для синхронизации приводов | 1976 |
|
SU610072A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| Устройство для определения скорости отклонения физической величины от требуемого значения | 1986 |
|
SU1508171A1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Цифровая сейсмостанция | 1985 |
|
SU1506411A1 |
