Изобретение относится к измерительной и вычислительной технике и автоматике.
Известны способы регистрации функций угловых и линейных перемещений датчиков на магнитном носителе путем записи импульсов на дорожках магнитной ленты.
Однако при известных способах плотность записи функций на магнитном носителе невелика.
С целью устранения этого недостатка по предложенному способу сигналы, соответствующие текущему значению функций перемещения в параллельном, п-разрядном коде, разделяют на три группы. Первую из этих групп формируют из сигналов двух младших разрядов, вторую - из сигналов k (где k,n) младших разрядов и третью - из сигналов п-k старших разрядов. Первую группу сигналов преобразуют в две взаимно ортогональные по функции перемещения последовательности импульсов, которые записывают на одних дорожках магнитной ленты, вторую - в отдельные импульсы, соответствующие определенной кодовой комбинации младших разрядов, которые записываются на другой дорожке магнитной ленты, а третью последовательно записывают в промежутках между одиночными импульсами.
щения отображают на дорожках памяти датчика путем за писи (формирования следующих четырех видов сигналов):
а) и б) пары периодических по координате
или функции координаты импульсных сигналов со скважностью два и периодом в четыре единицы счета соответствующей величины, сдвинутых друг относительно друга в направлении координаты или ее функции на одну
единицу счета в определенном направлении;
в) периодической последовательиости импульсов, длительностью в единицу счета со скважностью, которая численно выражается произведением двоек;
г) кодовых грунп импульсов, содержащих столько разрядов, сколько остается их после вычитания из полного числа разрядов, необходимых для отображения числового значения координаты или ее функции, числа двоек
упомянутого произведения.
Сигналы вида а и б служат для последующего воспроизведения абсолютной величины и знака приращения координаты или ее функции, сигнал вида в - для отображения и воспроизведения цифрового содержания младщих разрядов числа, выражающего текущее значение координаты или ее функции, и сигнал вида г - для отображения цифрового соСигналы вида а и б запоминают на двух отдельных дорожках памяти и лишь в простейшем случае линейной связи перемеш,ения с координатой или ее функцией. Оба сигнала могут быть совмеш,ены и записаны на одной дорожке. Сигнал вида в записывают на третьей дорожке, а сигнал вида г - на той же третьей дорожке в определенных местах между записями сигнала вида в.
Технический прием отображения знака и абсолютной величины приращения (но не его функций) с помош.ью периодического по перемешению сигнала (например, гармонического), записываемого на одной дорожке памяти и затем считываемого с помош,ью пары считывающих головок (контактов и др.) или одной головки Е-образного типа, известен.
Технический прием отображения цифрового содержания младших разрядов числа, выражаюш,его текущее значение функций перемещения, периодической последовательностью импульсов длительностью в единицу счета с периодом, если его выражать в единицах счета, равным произведению ряда двоек, представляется новым. Технический прием расщепления цифрового содержания числа на две части: часть, соответствующую младшим, и часть, соответствующую старшим его разрядам представляется новым. Прием отображения только старших разрядов числа цифровым кодом, записываемым в промежутках между записями импульсов, по которым восстанавливают значения младших разрядов, также представляется новым. Прием расщепления записи сигнала, выражающего знак и абсолютную величину приращеция перемещения, на две записи, ортогональные одна другой, и отображение их на двух отдельных дорожках па.мяти для обеспечения отображения нелинейных функций перемещения также представляется новым.
Предлагаемая совокупность технических приемов, обеспечивающая возможность отображения всего на трех дорожках памяти датчика цифрового содержания любых функций перемещения и, те.м самым, обеспечивающая возможность параллельного съема с датчика и цифровых значений линейной функции перемещения (координаты) и ряда ее функций, что позволяет освободиться от необходимости вычисления этих функций в процессе эксплуатации датчика и сэкономить время, также представляется новой.
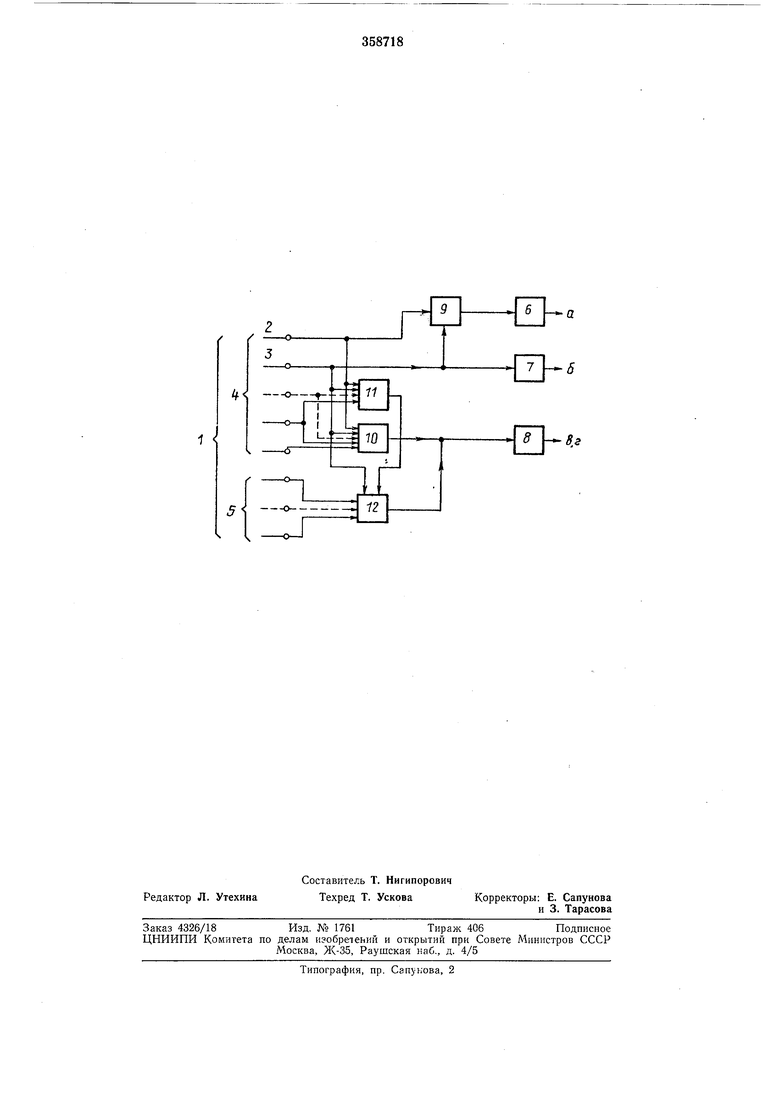
На чертеже показана упрощенная функциональная схема варианта устройства, реализующего способ отображения.
Устройство содержит разрядные шины / числа, выражающего текущее значение подлежащей отображению функции перемещения, шину 2 (младшую из числа разрядных), шину 3 (шину второго по старшинству разряда), группу шин 4, соответствующую «младшим разрядам числа, группу шин 5 - «старшим разрядам числа, головку 6 записи сигнала вида а, головку 7 записи сигнала вида
б, головку 8 залиси сигналов вида виг, импульсно-логическую схему 9, дешифраторы 10-11 и схему считывания цифрового содержания старших разрядов 12. Деление всех разрядов числа на «младшие и «старшие условно, и граница между ними может быть каждый раз онределена соображениями эксплуатационного удобства.
Способ отображепия осуществляется следующим образом.
На вход устройства подают в параллельном двоичном коде текущее значение подлежащей отображению в памяти датчика функции перемещения, которое представлено электрическими состояниями на разрядных шинах / этого числа. В процессе отображения состояния шин 1 изменяются согласно перемещению носителя памяти датчика дискретно с шагом в одну единицу счета функции перемещения
(в частном случае изменение в одну сторону,
например в сторону увеличения координаты).
Для того чтобы получить эти электрические
сигналы на щинах /, градуируемый датчик
механически сопрягают с образцовым датчиком. Если датчики аналогичны, то сигнал лолучают на шины 1 с образцового датчика. Если образцовый датчик - датчик одной из функций перемещения, а в градуируемый датчик нужно вписать другую или другие, то
выход образцового датчика соединяют с ЭВМ, которая вычисляет нужные функции и по окончании вычислений подает соответствующие сигналы на шины 1, затем оба датчика переводят в следующее положение, соответствующее изменению отображаемой величины па единицу счета. При этом дискретность счета ЭВМ должна быть .мельче единицы счета отображаемой функции. Возможен вариант предварительного преобразования, заключающийся в том, что в память ЭВМ закладывают «таблицу соответствия дискретных значений искомой функции ее аргументу, выдаваемому образцовым датчико.м. В моменты, когда в процессе перемещения датчиков
аргумент оказывается соответствуюши.м дискретному значению функции, это значение подается на шины /, т. е. это значение на шинах 1 изменяется на единицу счета. Таким образом, на шинах / цифровое содержание электрического сигнала должно изменяться согласованно с перемещением носителя памяти датчика с дискретностью в одну единицу счета соответствующей функции перемещения.
Электрические сигналы с шин двух младших разрядов подают па импульсно-логическую схему, сопоставляют один с другим и формируют сигнал, ортогональный сигналу на второй шине, который подают на головку записи 6 сигналов вида а. Электрический сигнал со второй шины подают на головку записи 7 сигнала вида б.
С помощью дещифраторов 10 и 11 непрерывно контролируют цифровое содержание
мощью дешифратора 10 определяют момент совпадения цифрового содержания с некоторым заданным, например таким, когда в старшем из младших разрядов - единица, а в остальных- нули. По этому совпадению формируют электрический импульс и подают его на головку 8 для записи на третью дорожку сигнала вида в. С помош,ью дешифратора // определяют момент совпадения цифрового содержания младших разрядов с другим наперед заданным, например таким, когда в старшем из младших разрядов - нуль, в предстаршем - единица, а в остальных - нули. По такому совпадению формируют импульс и подают его в схему 12 считывания старших разрядов числа, что разрешает ее работу. В ту же схему 12 подают сигнал с одной из младших шин, например со второй 3, которым приводят схему 12 в действие. С помощью схемы 12 производят в такт с изменениями состояния на шине 3 считывание сигналов со старших шин 5, подают считанные таким образом сигналы с выхода схемы 12 на головку 8 и записывают их на той же .третьей дорожке, т. е. помещают зались сигналов вида г между записями сигналов вида в.
В результате -получают на двух дорожках запись сигналов вида а и б, а на одной - вида б и г, причем благодаря синхронизации схемы 12 от шины второго или более старшего разряда обеснеч.ивают возможность последующей селекции, раздельного воснроизведения сигналов видов в и г при их считывании с одной и той же дорожки намяти.
Таким образом, на запись одной функции занимают всего три дорожки. При использовании известных способов отображения, например для записи угла с разрешающей способностью 8 угловых секунд нужно иметь 18 кольцевых дорожек и головок на одну эту функцию, т. е. в шесть раз больше. Это означает, что при той же сложности устройства памяти датчика и той же емкости памяти этого устройства в датчике можно отобразить не одну, а шесть функций перемещения: координату и пять других функций. При этом среди других могут быть, например, функция поправок к значениям координаты, тригонометрические функции, табличные функции координаты.
На основе и для реализации этого способа могут быть созданы цифровые датчики разного рода физических величин, легко преобразуемых в .перемещения; температуры, давления, силы и т. д. и их соответствующих функций. Папример, для определения косвенпым методом значения постоянной рефракции
нужно знать температуру и давление, и они могут быть получены в цифровой форме с помощью такого рода датчиков. Эти датчики могут дать не только значения температур и давлений, но и значения функций температуры и давления, выражающих поправки к среднему значению постоянной рефракции из-за изменения температуры и давлепия. Эта функциональная зависимость заранее известна, поэтому затрат времени на вычисления в
нроцессе экснлуатации датчиков не требуется. Кроме того, соответствующие вычислительные устройства для определения значений этих функций по их аргументам в .процессе эксплуатации также не требуются.
Предмет изобретения
Способ регистрации функций угловых и линейных перемещений датчиков на магнитном
носителе путем записи импульсов на дорожках магнитной ленты, отличающийся тем, что, с целью увеличения поверхностной плотности записи, сигналы, соответствующие текущему значению функций перемещения в параллельном /г-разрядном коде, разделяют на три группы, первую из которых формируют из сигналов двух младщих разрядов, вторую - из сигналов k (где ) младших разрядо.в и третью - из сигналов п - k старших разрядов, первую группу сигналов преобразуют в две взаимно ортогональные функции неремещения последовательности импульсов, которые записывают на одних дорожках магнитной ленты, вторую группу сигналов преобразуют в отдельные импульсы, соответствующие определенной кодовой комбинации младших разрядов, которые записывают на другой дорожке магнитной ленты, а третью группу сигналов последовательно записывают
в промежутках между одиночными .импульсами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ДАТЧИК ФУНКЦИЙ ПОЛОЖЕНИЯ | 1972 |
|
SU419936A1 |
| Цифровое измерительное устройство для обработки сигналов частотных датчиков | 1989 |
|
SU1659891A1 |
| УСТРОЙСТВО для СОГЛАСОВАНИЯ БЛОКА | 1968 |
|
SU222030A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1980 |
|
SU940213A1 |
| ЦИФРОВОЙ ЧАСТОТОМЕР | 1996 |
|
RU2097774C1 |
| Устройство управления замещением дефектных элементов изображения | 1986 |
|
SU1385327A1 |
| ЦИФРОВАЯ МАШИНА ДЛЯ ПОИСКА ИНФОРМАЦИИ | 1966 |
|
SU214201A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1982 |
|
SU1068995A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1980 |
|
SU930361A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |