Изобретение относится к технике накопления информации и может быть использовано в оптических, магнитных или иных записывающих и воспроизводящих устройствах с автоматической подачей головок з&писи-воспроизведения в направлении, пересекающем направление движения носителя информации.
Известно устройство, содержащее входную шину Управления, усилитель мощности, который подключен к обмотке электродвигателя, кинематически связанного с кареткой, обеспечивающей радиальное перемещение головок записи относительно магнитных дисков fi 3Недостатком устройства является наличие значительной погрешности позиционирования, вызванной отсутствием корректирующей цепи обратной связи по сигналу положения головок.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является .устройство, содержащее интерферометрический датчик перемещения каретки, реверсивный счетчик, усилитель мощности, к выхо ду которого подключен линейный электродвигатель, кинематически связанный с кареткой, на которой закреплены головки записи-воспроизведения и подвижная часть упомянутого датчика, и входную шину управления. Положение каретки с головками записИ-воспроизведения контролируется лазерньм интерферометром, формирующим импульсный сигнал для реверсивного счетчика в моменты прохождения кареткой расстояния (шага/, кратного длине волны лазерного излучателя Г2.
Однако в оптических системах видеозаписи на дисках такого шага позиционирования в настоящее время недостаточно в связи с постоянно увеличивающимися требованиями к повышению плотности записи.информации на дисковых носителях.
Цель изобретения ,- повышение плотности записи информации путем уменьшения шага позиционирования головок.
С этой целью в устройство, содержащее интерферометрический датчик перемещений каретки, реверсивный счетчик, усилитель мощности, к выходу которого подключен линейный электродвигатель, кинематически связанный с кареткой, на которой закреплены головки записи-воспроизведения и подвижная часть упомянутого датчика, и входную шину управления, введены два усилителя-ограничителя, блок выбора направления перемещения карет ки, пер.вый вычислитель и цепь из последовательно соединенных двухполупериодного выпрямителя аналого-цифрового преобразователя, второго вычислителя, первого входа преобразователя кодов, первого входа суммирующего блока и цифроаналогового преобразователя, причем интерферометрический датчик перемещений каретки выполнен с прямым и инвеЬ сным выхода ми, которые подключены через усилите-i ли-ограничители соответственно к прямому и инверсному входам -блока выбора направления перемещения каретки и соответственно к второму и третье0 |му входам преобразователя кодов, а прямой и инверсный выходы блока выбора направления перемещения каретки соединены соответственно с первым (суммирующим ) и вторым (вычитающим)
5 входами реверсивного счетчика, к третьему входу которого подключена входная шина управления и вход первого вычислителя/ а к четвертому и пятому входам реверсивного счетчика - соот0 ветственно первый и второй выходы вычислителя, третий выход, которого сбединен с вторым входом суммирующе. го блока, третий вход которого соединен с выходом реверсивного счетчика,
5 при этом вход двухполупериодного выпрямителя соединен с одним из входов интерферометрического датчика перемещений каретки, а выход цифроаналого вого преобразователя - с входом усиQ лителя мощности. .
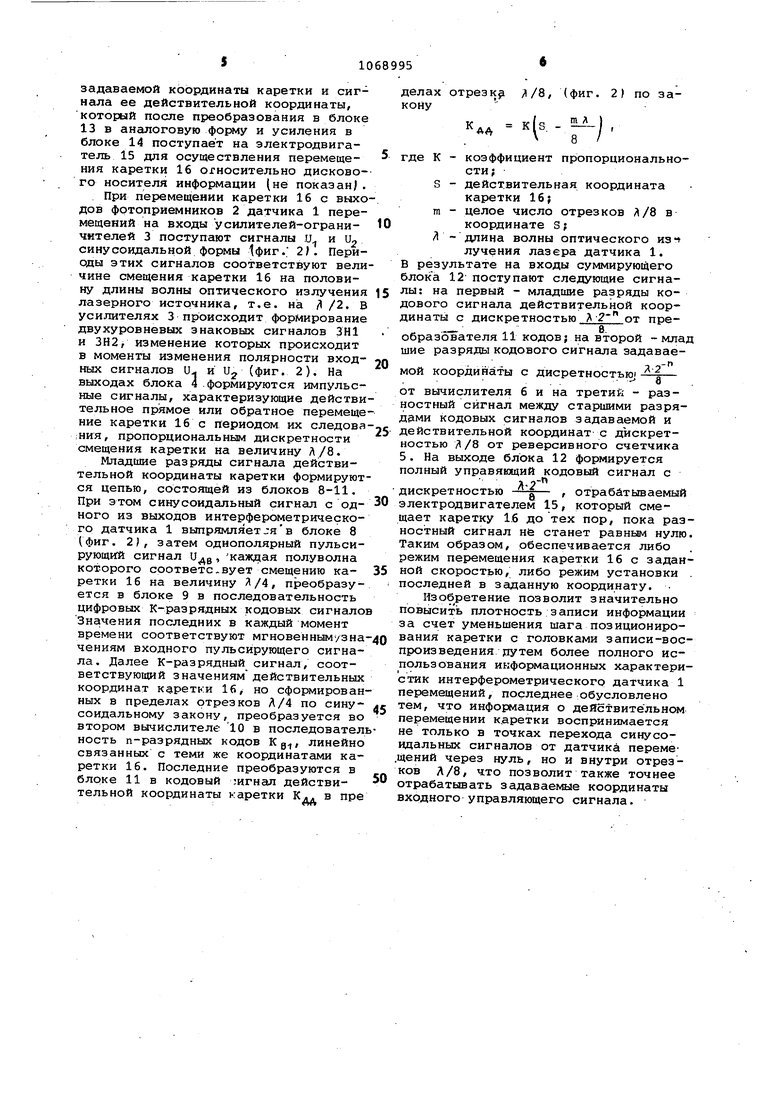
На фиг. 1 приведена схема устройства; на фиг. 2 - диаграмма работы предлагаемого устройства.
Устройство содержит интерферометт 5 рический датчик 1 перемещений каретки с фотоприемниками 2. Прямой и инверсный выходы датчика 1 подключены через усилители-ограничители 3 соответственно к прямому и инверсному
0 входам блока 4 выбора направления перемещения каретки, прямой и инверсный выходы которого соединены соответственно с первым (суммирующим) и вторым (вычитающим) входами реверсив5 ного сче.тчика 5. Вход первого вычислителя 6 соединен с входной шиной 7 управления и третьим входом реверсивного счетчика 5. Первый и второй вЕ1ходы вычислителя 6 соединены соотCQ ветственно с четвертым и пятым входами реверсивного, счетчика 5 . Один из выходов.датчика 1 перемещений каретки подключен через цепь последовательно соединенных двухполупериодного выпрямителя 8, аналого-цифровогопреобразователя 11, первого входа суммирующего блока 12, цифроаналогового преобразователя 13 и усилителя 14 мощности к линейному электродвигателю 15, кинематически связанному с
0 кареткой 16, на которой закреплены . головки записи-воспроизведения (не пoкaзaны и подвижная часть (не показана, выполнена в виде уголкового отражателя ) интерферометрического
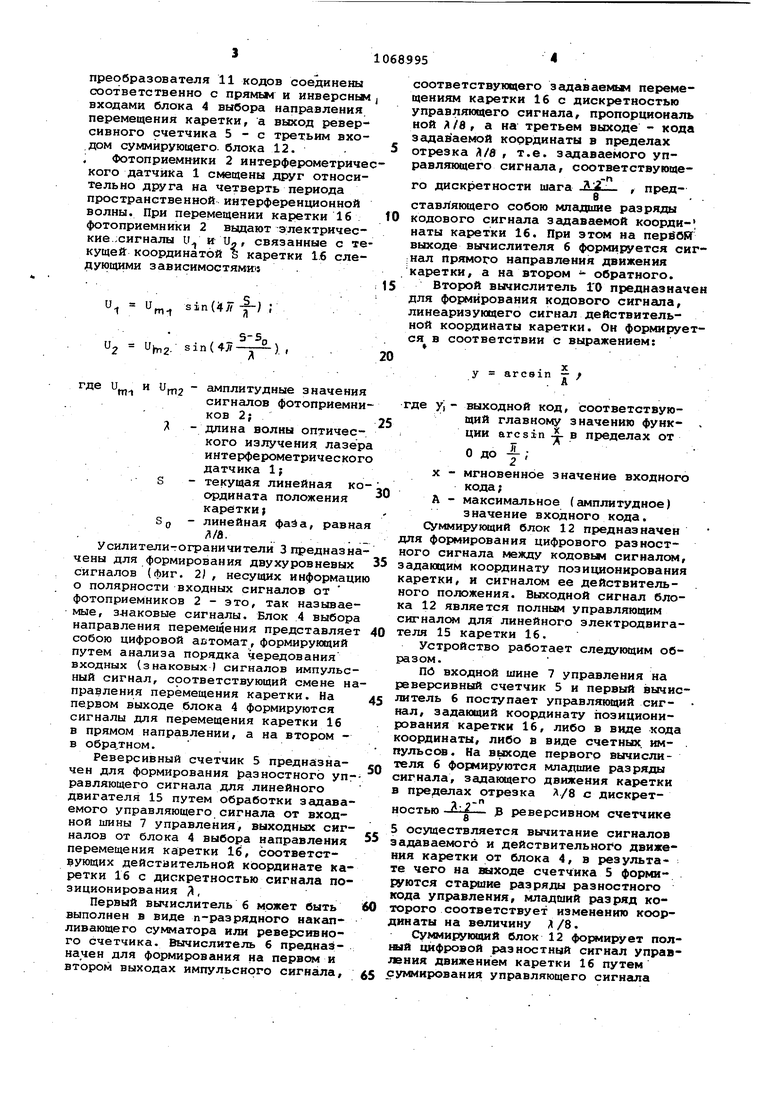
65 датчика 1. Второй и третий входы преобразователя 11 кодов соединены сх)ответственно с прямьм и инверсным входами блока 4 выбора направления перемещения каретки, а выход реверсивного счетчика 5 - с третьим входом суммирующего, блока 12. . , Фотоприемники 2 интерферометриче кого датчика 1 смещены друг относительно друга на четверть периода пространственной интерференхцюнной волны. При перемещении каретки 16 фотоприемники 2 выдают электрические сигналы и и и5, связанные с те кущей координатой S каретки 1.6 следующими зависимостями)} и, и sin(4y7|-; ; sin(4j
где и и амплитудные значения сигналов фотоприемников 2; л - длина волны оптического излучения лазера интерферометрического датчика 1;
S - текущая линейная координата положения каретки;
SQ - линейная , равная
;i/a.
Усилитепи-гограничители 3 предназначены для формирования двухуровневых сигналов (фиг. 21 , несущих информацию о полярности входных сигналов от фотоприемников 2 - это, так называемые, з-наковые сигналы. Блок 4 выбора направления перемещения представляет собою цифровой аи томат, формирующий путем анализа порядка чередования входных (знаковых ) сигналов импульсный сигнал, соответствующий смене направления перемещения каретки. На первом выходе блока 4 формируются сигналы для перемещения каретки 16 в прямом направлении, а на втором в обра.тном.
Реверсивный счетчик 5 предназначен для формирования разностного уп-равляющего сигнала для линейного двигателя 15 путем обработки задашаемого управляющего сигнала от входной шины 7 управления, выходных сигналов от блока 4 выбора направления перемещения каретки 16, соответствующих действительной координате каретки 16 с дискретностью сигнала позиционирования 3
Первый вычислитель 6 может быть выполнен в виде п-разрядного накапливающего сумматора или реверсивного счетчика. Вычислитель 6 предназначен для формирования на первсях и втором выходах импульсного сигнала,
у arcein - /
где у; - выходной код, соответствующий главному значению функции arc sin 4- в пределах от
О ДО
X - мгновенное значение входного
кода;
А - максимальное (амплитудное) значение входного кода.
Суммирующий блок 12 предназначен для формирования цифрового разностного сигнала между кодовьм сигналом задающим координату позиционирования каретки, и сигналом ее действительного положения. Выходной сигнал блока 12 является полным управляющим сигналсяи для линейного электродвигателя 15 каретки 16.
Устройство работает следующим образом.
Пи входной шине 7 управления на реверсивный счетчик 5 и первый вычислитель 6 поступает управляющий сигнал, задающий координату позиционирования каретки 16, либо в виде кода координаты, либо в виде счетных, импульсов. На выходе первого вычислителя 6 формируются младшие разряды сигнала, задакщего движения каретки в пределах отрезка Д/8 с дискретностью В реверсивном счетчике
5 осуществляется вычитание сигналов задаваемого и действительного движения каретки от блока 4, в результате чего на выходе счетчика 5 формируются старшие разряды разностного кода управления, младший разряд которого соответствует изменению координаты на величину Д/8.
Суммирующий блок 12 формирует полный цифровой разностный сигнал управления движением каретки 16 путем суммирования управляющего сигнала соответствующего задаваемые перемещениям каретки 16 с дискретностью управляющего сигнала, пропорциональ ной Д /в г а на третьем выходе - кода задаваемой координаты в пределах отрезка /8 , т.е. задаваемого управляющего сигнала, соответствующе,.,-1 го дискретности шага Л i ,..., , предcтaвJfяющeгo собою младшие разряды кодового сигнала задаваемой координаты каретки 16. При этом на перйвИ выходе вычислителя 6 формируется сигнал прямого направления движения каретки, а на втором - обратного. Второй вычислитель ГО предназначен для формирования кодового сигнала, линеаризующего сигнгш действительной координаты каретки. Он формируется в соответствии с выражением: .- .
задаваемой координаты каретки и сигнала ее действительной координаты, который после преобразования в блоке 13 в аналоговую форму и усиления в блоке 14 поступает на электродвигатель 15 для осуществления перемещения каретки 16 относительно дискового носителя информации (не показaн.
При перемещении каретки 16 с выходов фртоприемников 2 датчика 1 перемещений на входы усилителей-ограниЧите лей 3 поступают сигналы и и 11 синусоидальной формы 1фиг. 2. Периоды этих сигналов соответствуют величине смещения каретки 16 на половину длины волны оптического излучения лазерного источника, т.е. на /1/2. В усилителях 3 происходит формирование двухуровневых знаковых сигналов ЗН1 и ЗН2, изменение которых происходит в моменты изменения полярности входных сигналов U и и (фиг. 2). На выходах блока 4.формируются импульсные сигналы, характеризующие действительное прямое или обратное перемещение каретки 16 с периодом их следова :ния, пропорциональным дискретности смещения каретки на величину Л/8.
Младшие разряды сигнала действительной координаты каретки формируются цепью, состоящей из блоков 8-11. При этом синусоидальный сигнал с одного из выходов интерферометрического датчика 1 выпрямляет-гя в блоке 8 (фиг. 2), затем однополярный пульсирующий сигнал , каждая полуволна которого соответс.вует смещению каретки 16 на величину , преобразуется в блоке 9 в последовательность цифровых К-разрядных кодовых сигнало Значения последних в каждый момент времени соответствуют мгновеннымузна чениям входного пульсирующего сигнала. Далее К-разрядный сигнал, соответствующий значениям действительных координат каретки 16, но сформированных в пределах отрезков Д/4 по синусоидальному закону, преобразуется во втором вычислителе 10 в последователность п-разрядных кодов Кд, линейно связанных с теми же координатами каретки 16. Последние преобразуются в блоке 11 в кодовый ;игнал действительной координаты каретки Кд. в пре
делах отрезку Л/8, (фиг. 2) по закону
( - /
КАЛ к
где К - коэффициент пропорциональности;S - действительная координата
каретки 16; m - целое число отрезков Л/8 в
координате 3; Л - длина волны оптического изп
лучения лазера датчика 1. В результате на входы суммируюйего блока 12 поступают следующие сигналы: на первый - младшие разряды кодового сигнала действительной координаты с лискретностью 2 от пре-и
образователя 11 кодов; на второй -мла
шие разряды кодового сигнала задаваегГ
Д-2
мой координаты с дисретностью
8
от вычислителя 6 и на третий - разностный сигнал между старшими разрядами кодовых сигналов задаваемой и действительной координат с дискретностью Д/8 от реверсивного счетчика 5. На выходе блока 12 формируется полный управяющий кодовый сигнал с
дискретностью , отрабатьшаемый
электродвигателем 15, который смещает каретку 1.6 до тех пор, пока разностный сигнал нб станет равным нулю. Таким образом, обеспечивается либо режим перемещения каретки 16 с заданной скоростью, либо режим установки . последней в заданную координату.
Изобретение позволит значительно повысить плотность записи информации за счет уменьшения шага позиционирования каретки с головками записи-воспроизведения jjy тем более полного использования информационных характеристик интерферометрическогр датчика 1 перемещений, последнее обусловлено тем, что информация о действительном перемещении к.аретки воспринимается не только в точках перехода синусоидальных сигналов от датчика переме .щений через нуль, но и внутри отрезков Л/8, что позволит также точнее отрабатывать задаваемые координаты входного управляющего сигнала.
t
ХУ ЧХ
/OCX
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования головок записи-воспроизведения | 1983 |
|
SU1167653A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1987 |
|
SU1446653A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1988 |
|
SU1550576A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1265847A2 |
| Устройство управления позиционером | 1990 |
|
SU1739386A1 |
| Устройство координатного позиционирования | 1989 |
|
SU1695264A1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |

УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ГОЛОВОК ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ содержащее интерферометрический датчик перемещений каретки, реверсивный счетчик, усилитель мощности, к выходу которого подключен линейный электродвигатель, кинематически связанный с кареткой, на которой закреплены головки записи-воспроизведения и подвижная часть указанного датчика, и входную шину управления, о т л ичающееся тем, что, с целью повышения плотности э.аписи информации путем уменьшения шага позиционирования головок, в него введены два усилителя-ограничителя, блок выбора направления перемещения каретки, пер вый вычислитель и цепь из последовательно соединенных двухполупери.одного зыпрямителя, аналого-цифрового fi .-::., преобразователя, второго вычислителя первого входа преобразователя кедов, первого входа суммирующего блока и цифроаналогового преобразователя, причем интерферометрический датчик перемещения каретки выполнен с прямым и инверсным выходам., которые I подключены через усилители-ограничители соответственно к прямому и инверсному входам блока выбора направления перемещения каретки и соответственно к второму и третьему входам преобразователя кодов, а прямой и инверсный выходы блока выбора направ ления перемещения каретки соединены соответственно с первьил (суммирующим) и вторым (вычитающим входами реверсивного счетчика, к третьему входу которого подключена входная шина управления и вход первого вычислителя, а к четвертому и пятому входам рюверсивного, счетчика - соответственно первый и второй выходы вычислителя, третий выход которого соединен с вторам входом суммирующего блока, третий вход которого соединен с выходЪм реверсивного счетчика, при этом вход двухполупериодного выпрямителя соединен с одним из выходов интерферрметрического датчика перемещений каретки, а выход цифроаналогового преобразователя с входом усилителя мощности.
Vv
%
л
HxlxIxVlxlxixl,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перемещения магнитных головок относительно магнитных дисков | 1978 |
|
SU680039A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Новосибирск, 1980, с | |||
| Насос | 1917 |
|
SU13A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
