Известны гидравлические системы автоматического управления крепью.
Предложенное устройство отличается от известных тем, что оно снабжено блокирующим элементом с гидравлической фиксацией, который соединен с линией управления и датчиком переднего положения, а межсекционными связями - с предыдущей и последующей секциями крепи; датчик переднего положения выполнен с фиксацией в двух крайних положениях и соединен с магистралью передвижки конвейера. Это позволяет повысить безопасность и надежность управления.
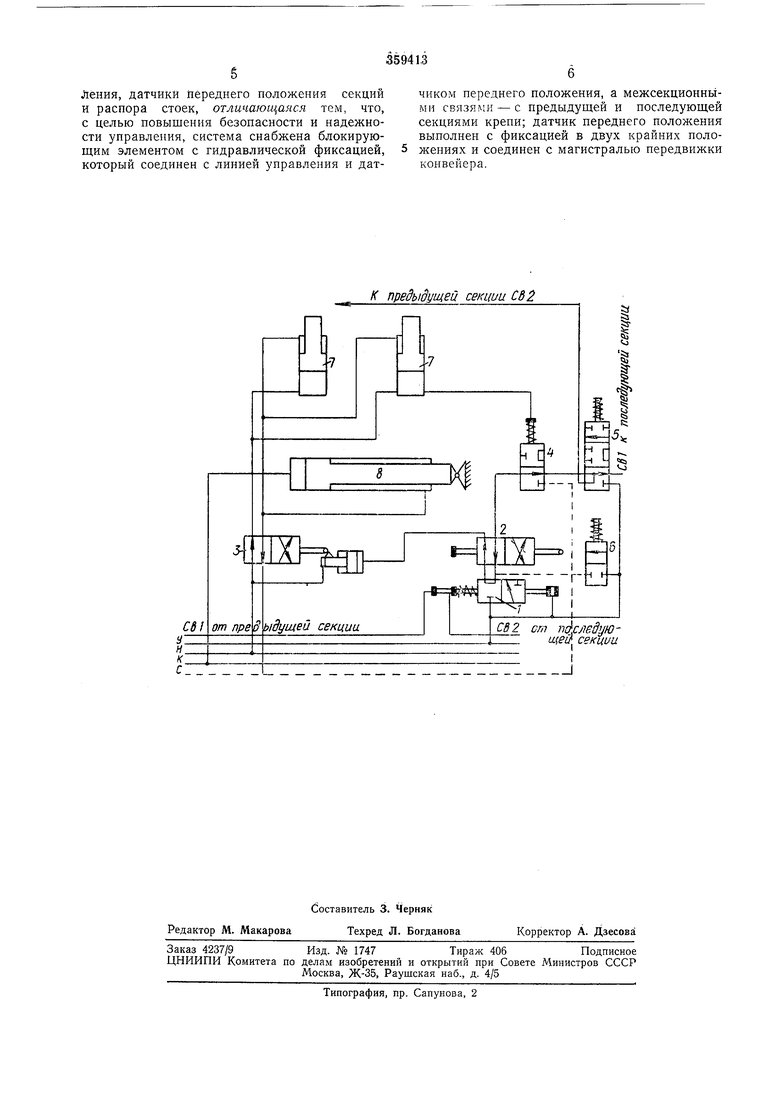
На чертеже показана предложенная гидравлическая система автоматического управления крепью.
Система включает следующие элементы: блокирующий элемент 1, имеющий гидравлическую блокировку в одной из крайних позиций и предназначенный для соединения датчика 2 переднего положения с линией управления У при подаче в него давления межсекционных связей Св1 и Св2 или для соединения датчика 2 переднего положения со сливом при отсутствии давления в межсекционных связях Св1 и Св2; датчик переднего положения, служащий для контроля перемещения секций
крепи; распределитель 3 автоматического управления, используемый для управления работой гидравлических исполнительных устройств секций крепи; датчик 4 распора, контролирующий величину давления в поршневой полости стоек; распределитель 5 дистанционного управления соседней секцией крепи при аварийных ситуациях; аварийную гидравлическую кнопку 6 «стоп, предназначенную для аварийной остановки работающих секций крепи при аварийных ситуациях; межсекционные связи Св1 и Св2, представляющие собой трубопроводы, соединяющие смежные секции крепи; магистраль управления У для питания
системы управления стабилизированным давлением и для аварийной остановки работающих секций.
Гидросистема секции крепи включает гидростойки 7 с предохранительным клапаном и гидрозамком, гидродомкрат 8 для подтягивания секции к конвейеру и передвижки конвейера, напорную Я и сливную С магистрали и магистраль К передвижки конвейера, которая используется только для фронтальной перенен каналами с блокирующим элементом 1, распределителем 5 автоматического управления, сливной магистралью С и датчиком - распора; кроме того, он соединяется с магистралью К передвижки конвейера. Автоматический распределитель 3 имеет привод и исполнительную часть, соединенную трубопроводами с полостями гидростоек 7 и гидродомкрата 8. Датчик распора соединен с поршневой полостью стоек, с датчиком 2 переднего положения и сливной магистралью С. Аварийная гидрокнопка 6 «стоп соединена с линией управления У и сливной магистралью С. Элементы 1, 2, 3, 4 и 6 - двухпозицпонные. Распределитель 5 дистанционного управления выполнен, трехпозиционным и соединен с датчиками 4 распора, линией управления У, сливной магистралью С и межсекциопными связями Се/ и Св2.
- Гидравлическая система автоматического унравления крепью работает следуюш,им образом.
В исходном состоянии датчик 2 переднего положения соединяет привод распределителя 3 автоматического управления со сливной магистралью С через блокирующий элемент /. Межсекционные связи Св1 и Св2 через блокирующий элемент также соединены со сливной магистралью С. Распределитель находится в позиции, соответствующей состоянию распо-ра секции крепи.
Для начала работы в направлении слева направо оператор вручную вентилем (на чертеже не показан) подает рабочую жидкость под давлением из линии управления У в блокирующий элемент первой секции крепи слева, который переходит во вторую из двух позиций и блокируется в этой позиции гидравлической блокировкой. При этом жидкость под давлением из линии управления У поступает в датчик 2 переднего положения и через него - в привод распределителя 3 автоматического управления. Распределитель переходит во вторую из двух позиций, секция разгружается и передвигается. В конце передвижки секция воздействует на датчик переднего положения и переводит его во вторую из двух позиций, в которой привод распределителя соединяется со сливом.
Распределитель возвращается в исходное положение, секция распирается. Когда давление распора в поршневых полостях гидростоек 7 достигает заданной величины, срабатывает датчик 4 распора, и жидкость под давлением из блокирующего элемента 1 через датчик распора и распределитель 5 дистанционного управления поступает в межсекционную связь Св2 (связь Cel на первой секции крепи слева отсутствует). По связи Св2 жидкость под давлением поступает в блокирующий элемент второй секции, и происходит разгрузка, передвижка и распор этой секции аналогично первой секции. Когда все секции крепи передвинутся, снимается давление в линии управления У, и блокирующие элементы 1 на всех секциях крепи разблокируются и возбращаютсй в исходное состояние.
Фронтальная передвижка конвейера осуществляется подачей давления в магистраль /С передвижки конвейера. Одновременно давление поступает во все датчики 2 переднего положения, которые возвращаются в исходное положение справа налево.
При обратном порядке передвижки крепи заявляемая система работает аналогично. В этом случае первой будет крайняя секция крепи справа, на которой пет межсекционной связи Cel. Для аварийной остановки и распора секции крепи необходимо нажать аварийную гидравлическую кнопку 6 «стоп.
При этом линия управления У соединяется со сливной магистралью С, все блокирующие элементы / возвращаются в исходное положение, при котором привод распределителя 3 автоматического управления соединяется со сливной магистралью С, и секции крепи переводятся в соседние распоры. После опускания гидравлической кнопки «стоп линия управления У изолируется от сливной магистрали С, но все секции крепи остаются в состоянии распора, так как их блокирующие элементы остаются в исходном состоянии. Чтобы включить в работу секции крепи, необходимо подать давление по межсекционной связи Cel или Св2 в блокирующий элемент 1, что достигается распределителем 5 дистанционного управления предыдущей секции. При этом начинается цикл автоматической работы последующих секций, предыдущие остаются в состоянии распора. Если по каким-либо причинам секция не передвинулась и не воздействовала на датчик 2 переднего положения, эту секцию можно обойти и включить в работу следующую секцию распределителем 5 дистанционного управления.
При этом давление из линии управления У поступает непосредственно в межсекционную связь, минуя датчик 2 переднего положения предыдущей, непередвинутой секции. При местном управлении возможность появления второй волны автоматической передвижки секции крепи исключена благодаря тому, что блокирующие элементы 1 находятся в исходном состоянии. Перейти в другое состояние они могут только тогда, когда окончится цикл автоматической работы предыдущей секции и давление поступит в межсекционную связь. Обрыв межсекционной связи не влечет прекращения автоматической работы; для ее продолжения необходимо нажать и отпустить гидравлическую кнопку 6 «стоп, после чего распределителем 5 дистанционного управления продолжить передвижку секций в автоматическом режиме.
Предмет изобретения
Ленин, датчики переднего положения секций и распора стоек, отличающаяся тем, что, с целью повышения безопасности и надежности управления, система снабжена блокирующим элементом с гидравлической фиксацией, который соединен с линией управления и датчиком переднего положения, а межсекционными cвязя ;и - с предыдущей и последующей секциями крепи; датчик переднего положения выполнен с фиксацией в двух крайних положениях и соединен с магистралью передвижки конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления крепью | 1980 |
|
SU934051A1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Система централизованного гидравлического или пневматического управления механизированной шахтной крепью | 1970 |
|
SU439614A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПЬЮ | 1972 |
|
SU348746A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ФРОНТАЛЬНОЙ ПЕРЕДВИЖКОЙ ЗАБОЙНОГО КОНВЕЙЕРА1тш тш^т | 1972 |
|
SU435357A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Гидравлическая система группового управления секциями шахтной крепи | 1978 |
|
SU752037A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
/Г предыдущей секции. С82
