Изобретение относится к горной промышленности и предназначено для дистанционного управления секциями крепи угледобывающих агрегатов.
Целью изобретения является повышение надежности работы агрегата.
На фиг. 1 представлена принципиальная механо-гидравлическая схема агрегата; на фиг. 2 - принципиальная гидравлическая схема системы управления одной секцией крепи (гидравлическая схема известной крепи ОКП70 показана условно).
Система содержит базу 1 с конвейерным ставом, фронтально передвигаемую гидроцилиндрами 2 и 3, крепь, гидростойки 4 которой образуют три группы секций 5, пульт 6 дистанционного управления, установленный на штреке и соединенный с каждой группой секций 5 .магистралями: напорной 7, сливной 8, разгрузки 9 гидростоек каждой группы секций; распора 10 гидростоек, блокировочный элемент с ручным управлением 11, подпружиненный блокировочный элемент 12 с гидроуправлением, систему индивидуального гидроуправления секцией с многопозиционным распределителем 13, подпорным клапаном 14, клапаном ИЛИ 15, гидрозам- ком 16 гидростойки 4, дросселем 17 и обратным клапаном 18. Ручки 19 управления распределителей 13 каждой группы секций кинематически связаны между собой с помошью тяг 20 с регулировочны.ми муфтами 21. Тяги 20 присоединены к трем гидроцилиндрам 22 управления, установленным на штреке. Управление гидроцилиндрами 22 осушествля- ется с пульта 6 управления. В одном положении гидроцилиндров 22 управления распределитель 13- включен на передвижение секции (позиции III - IV), в другом край- нем положении гидроцилиндра 22 управления распределитель 13 включен на передвижение конвейера (позиция VII). Блокировочный элемент соединен каналом 23 через клапан ИЛИ 15 со штоковой полостью гидростойки 4, каналом 24 со штоковой полостью гидроцилиндра 3 перемещения и каналом 25 - с магистралью 9 разгрузки секций. Блокировочный элемент 12 соединен каналом 26 через гидрозамок 16 с поршневой полостью гидростоики 4, каналом 27 - с подпорным клапаном 14 и каналом 28 - с магистралью 10 распора гидростоек. Гидроуправление блокировочного элемента 12 осундествляется от магистрали 10 с помошью канала 29. Каналы а, б, в, г на фиг. 1 соответствуют каналам а, б, в, г на фиг. 2.
Система работает следующим образом.
В любой момент времени одна из трех групп секций крепи, например первая, находится в передвижке, т. с. разгружается и подтягивается к базе 1 агрегата, а остальные две группьЕ расперты. Затем разгружается и подтягивается вторая гругша секций.
0
5 5 0 40 0
55
45
а остальные две группы расперты. Затем разгружается и подтягивается третья группа секций крепи. После распора всех трех групп секций база 1 передвигается на забой. В дальнейшем последовательность разгрузки и передвижки повторяется.
Дистанционная передвижка каждой группы секций осушествляется следующим образом.
Гидроцилиндром 22 управления с помошью тяг 20 ручки 19 управления многопозиционного распределителя 13 группы секций устанавливаются в положение позиции III-IV. Ручка управления блокировочного элемента 11 устанавливается в положение II Рабочая среда под давлением подается через пульт 6 управления по напорной магистрали 7, каналы распределителя 13 в што- ковые полости гидроцилиндров 2 и 3 и в камеру управления клапана 14, переключая его в положение П. Для разгрузки и подтягивания группы секций на забой рабочая среда нод давлением подается через пульт 6 управления, магистраль 9 разгрузки гидростоек группы секций, канал 25, канал блокировочного элемента 11, канал 23, клапан ИЛИ 15 в штоковую полость гидростойки 4 и в камеру управления гидрозамка 16. Гидрозамок 16 открывается и поршневая полость гидростойки 4 через гидрозамок 16, канал 26, блокировочный элемент 12, канал 27 сообщается с подпорным клапано.м 14. Поднорный клапан 14 настроен на пониженное, разгрузочное давление. При повышении давления в поршневой полости гидростойки 4 выше давления настройки, подпорный клапан 14 переключается и излишек рабочей среды через распределитель 13 поступает в сливную магистраль 8. При понижении давления в поршневой полости гидростойки 4 ниже настройки подпорного клапана 14 осушествляется автоматическая подпитка с помошью дросселя 17 и обратного клапана 18. Таким образом, группа секций разгружается и подтягивается к забою. После того, как все секции группы передвинулись, с пульта 6 управления подается давление рабочей среды в магистраль 10 распора и по каналу 28 в блокировочный элемент 12. Одновременно по каналу 29 рабочее давление среды подводится в ка.меру управления блокировочного элемента 12, переключая последний в положение II. После чего рабочее давление через канал блокировочного элемента 12, канал 26, гид- роза.мок 16 поступает в поршневую полость гидростойки 4, осуществляя ее распор. Одновременно с этим через пульт 6 управления магистраль 9 разгрузки соединяется со сливом, соединяя со сливом штоковую полость гидростойки 4 через клапан ИЛИ 15, канал 23, блокировочный элемент 11, канал 25. После распора стоек 4 .магистраль 10 соединяется со сливо.м через пульт 6 управления.
Аналогично осуществляется передвижка двух других групп секций. После передвижки и распора всех секций крепи осуществляется передвижка базы 1 (конвейерного става). Для этого с пульта 6 управления с помощью гидроцилиндров 22 управления, тяг 20, ручек 19 осуществляется переключение всех распределителей 13 в положение VII (фиг. 2). При этом рабочая среда под давлением от напорной магистрали 7, через канал распределителя 13, поступает в поршневую полость гидроцилиндра 2 перемещения, осуществляя передвижку базы I.
Для перехода на индивидуальное управление любой секции ручка 19 распределителя 13 этой секции отсоединяется от тяг 20, блокировочный эле.мент 11 переключается в положение I (как показано на фиг. 2) и секция готова к индивидуальному управлению. Так как гидравлическая схема секции использована с комплекса ОКП70 без изменений, индивидуальное управление всех гидроцилиндров секции аналогично управлению секции ОКП70. Например, для вы- движки секции с активным подбором необходимо установить рукоятку переключателя клапана ИЛИ 15 перпендикулярно к оси корпуса многопозиционного распределителя 13 в положение III - IV, отсекателя в положение 1. В результате поток жидкости пойдет в щтоковые полости гидроцилиндров 2 и 3. Одновременно с этим подпорный клапан 14 закрывается (положение II), впускной клапан гидрозамка 16 открывается и давление в поршневой полости гидростойки 4 понижается до давления настройки подпорного клапана 14, таким образом, при выд- вижке секции гидростойка 4 будет развивать усилие, зависящее от давления настройки подпорного клапана и передвижки крепи. По .окончании выдвижки закрыть отсе- катель, рукоягку распределителя 13 установить в положение VI, открыть отсекатель, распереть гидростойку 4, закрыть отсекатель, а затем рукоятку управления распределителя 13 установить в положение 0.
Формула изобретения
Система управления секциями крепи угледобывающего агрегата, содержащая фронтально передвигаемую базу, крепь, состоящую из трех групп секций, связанных с базой с помощью гидроцилиндров перемеще0 ния, гидростойки, систему индивидуального гидроуправления секцией с многопозиционным распределителем и блокировочным элементом с гидроуправлением, подключенным одним из входных гнезд к многопозиционному распределителю, пульт дистанционного управления, напорную и сливную магистрали, магистраль распора гидростоек и магистрали разгрузки гидростоек каждой группы секций, отличающаяся тем, что, с целью повыщения надежности работы, она снаб0 жена блокировочными элементами с ручным управлением и гидроцилиндрами управления, а многопозиционный распределитель выполнен с ручным управлением, причем блокировочные элементы с ручным уп равлением соединены одним входом со щто- ковыми полостями гидроцилиндров перемещения и другим входом - с магистралью разгрузки секции, а выходом - со щтоко- вой полостью гидростойки, блокировочные элементы с гидроуправлением соединены
0 вторым входом с магистралью распора гидростоек, а выходом - с порщневой полостью гидростойки, при этом щток гидроцилиндра угфавления кинематически соединен с ручками управления мпогопозиционных распределителей каждой группы секций, а
5 щтоковая и порщневая полости гидроцилиндра управления подключены к пульту дистанционного управления, причем щтоки домкратов установлены с возможностью включения в одном крайнем юложении всех
„ многопозиционных распределителей группы секций на передвижку базы, а в другом крайнем положении - на передвижку секций.
20 21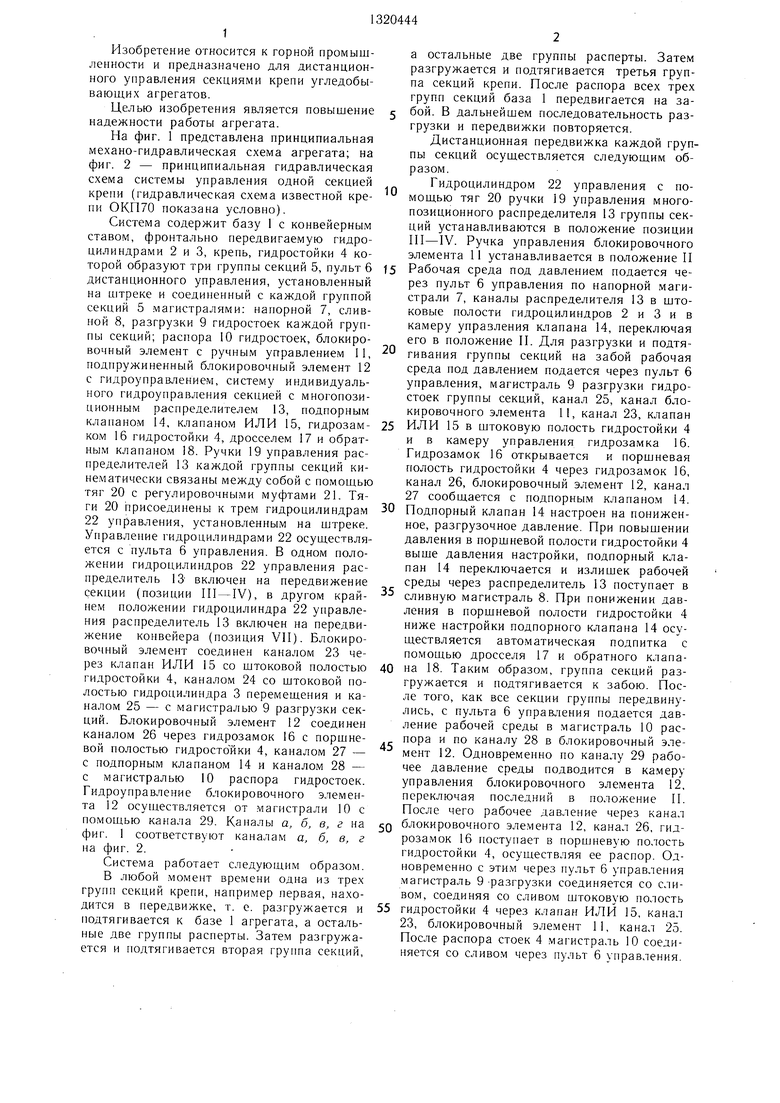

| название | год | авторы | номер документа |
|---|---|---|---|
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
| Устройство для управления секцией гидрофицированной крепи | 1980 |
|
SU1102978A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Гидросистема механизированной крепи для пластов наклонного падения | 1989 |
|
SU1681015A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| Гидросистема механизированной крепи | 1985 |
|
SU1270360A1 |
| Устройство обеспечения подпора | 1975 |
|
SU746121A1 |
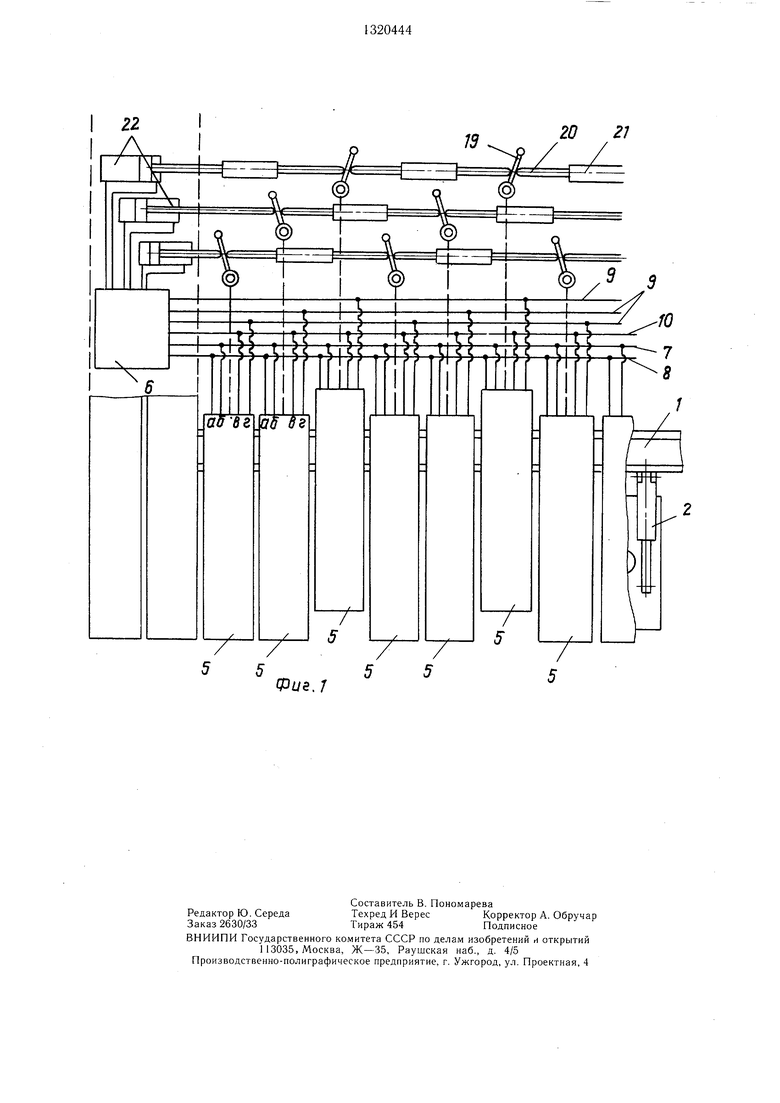
Изобретение относится к горной промышленности и повышает надежность работы агрегата. Для этого система управления крепи угледобывающего агрегата имеет блокировочный элемент (ЪЭ) 11 с ручным управлением и БЭ 12 с гидроуправлением посредством гидроцилиндров (ГЦ), установленных на штреке. Каналом 23 через клапан ИЛИ 15 БЭ 11 соединен со штоко- вой полостью гидростойки 4, каналом 24 - со штоковой полостью ГЦ 3 перемеш.ения и каналом 25 - с магистралью разгрузки секций. Каналом 26 БЭ 12 соединен через гидрозамок 16 с поршневой полостью гидростойки 4, каналом 27 - с поршневым клапаном 14 и каналом 28 - с магистралью распора гидростоек. Многопозиционный распределитель (МПР) 13 выполнен с ручным управлением. Ручки управления МПР 13 каждой группы кинематически связаны между собой посредством тяг с регулировочными муфтами. Тяги присоединены к штокам трех ГЦ управления, установленных на штреке. Штоковая и поршневая полости ГЦ управления МПР 13 подключены к пульту дистанционного управления. Штоки ГЦ управления установлены с возможностью включения в одном крайнем положении всех МПР 13 группы секций на передвижку базы, а в другом крайнем положении - на передвижку секций. 2 ил. i СП 12И&- со N3 О 4:
| Устройство для дистанционного управления многопозиционными гидрораспределителями | 1969 |
|
SU752036A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
