Предметом настоящего изобретения является устройство для приведения в движение плавникообразного пропеллера, геометрическая ось которого описывает замкнутый путь, причем пропеллер совершает половину оборота вокруг указанной оси за время, в течение которого эта ось один раз проходит упомянутый замкнутый путь.
Согласно изобретению, приспособление, заставляющее геометрическую ось пропеллера описывать замкнутый путь, и приспособление, приводящее пропеллер во вращение с вышеуказанной скоростью, представляют собой отдельные механизмы.
Настоящее изобретение дает возможность осуществления простого привода (управления) для плавникообразного пропеллера, при легком обслуживании, осмотре и очистке последнего, так как каждое из указанных приспособлений может отдельно контролироваться или регулироваться или быть заменено в случае надобности.
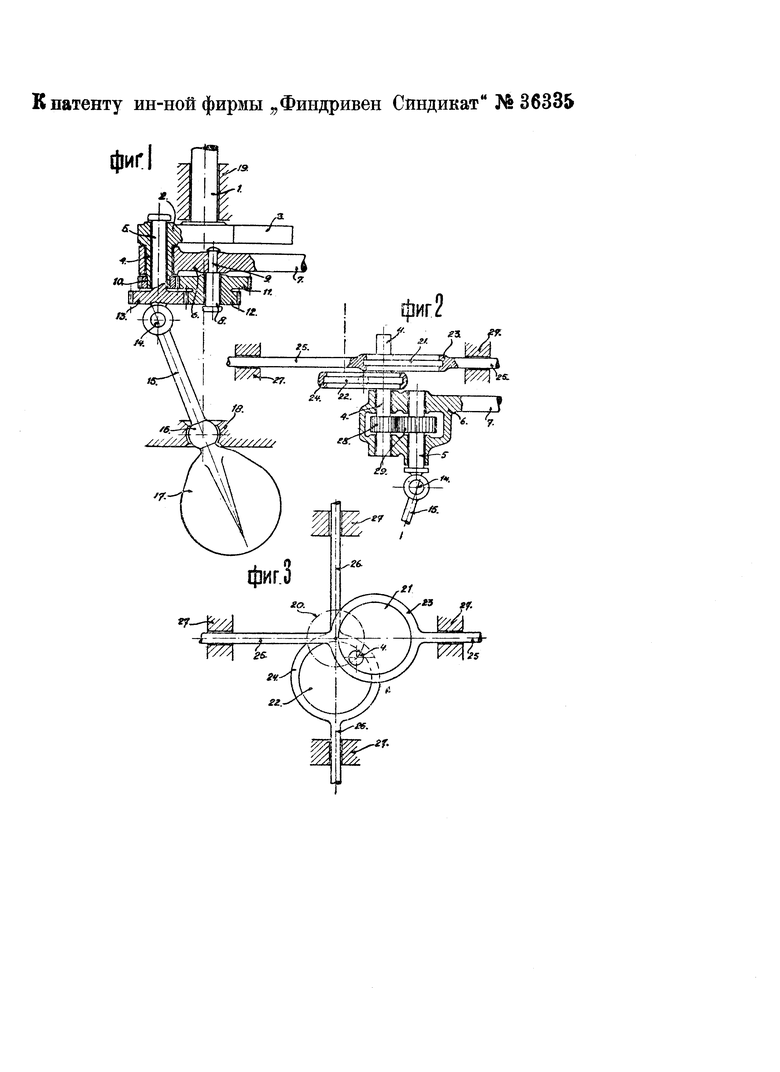
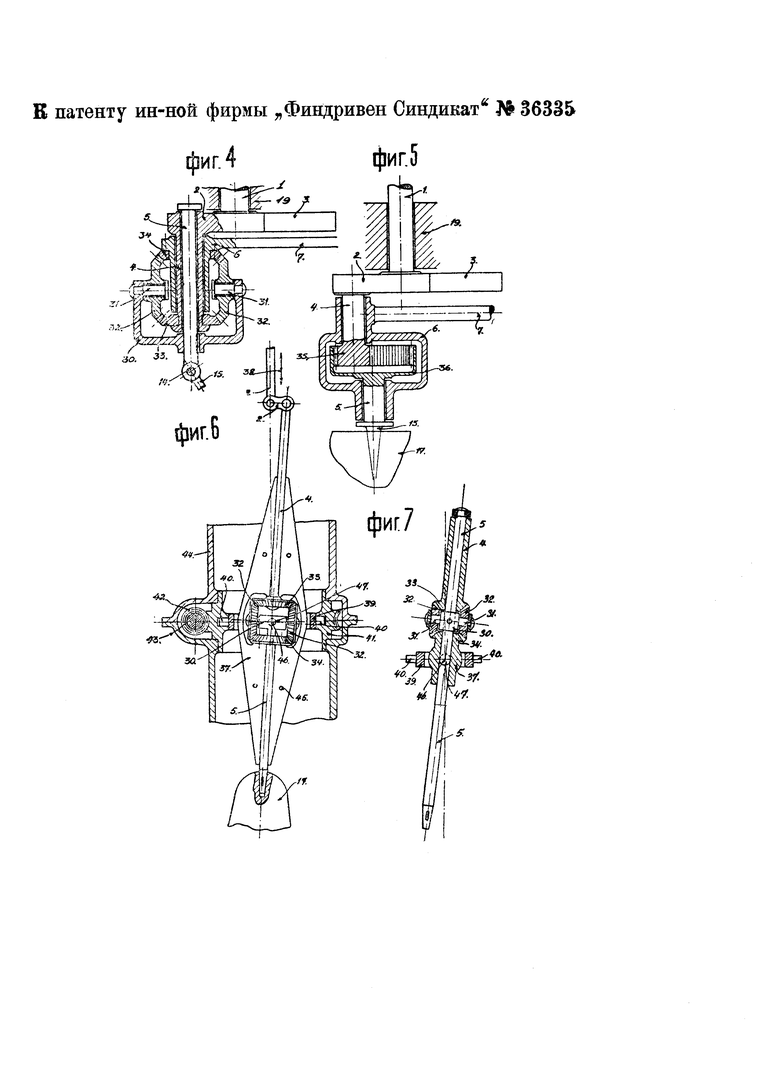
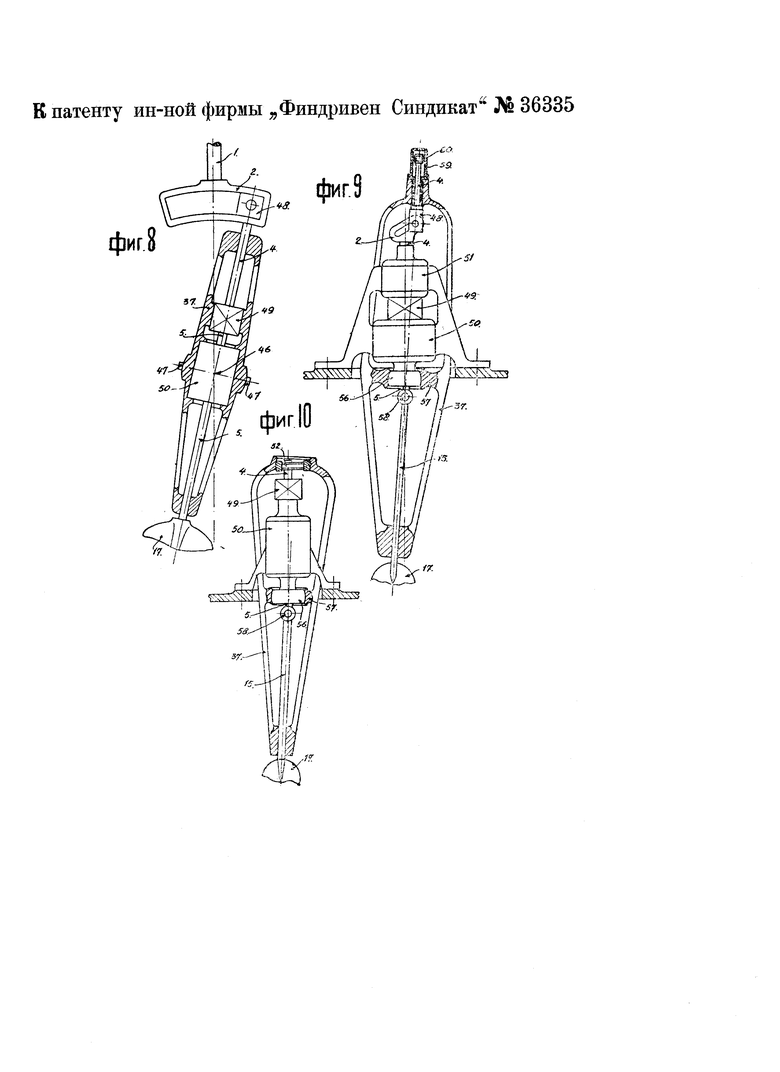
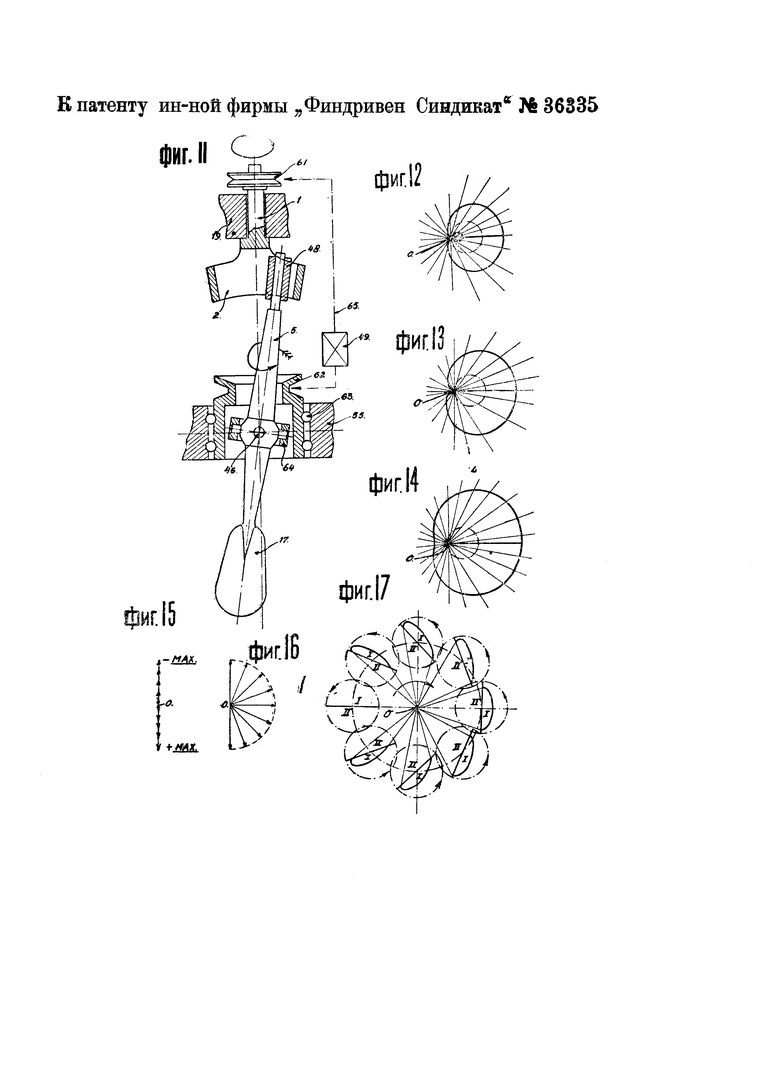
На чертеже фиг. 1 изображает вертикальный разрез устройства для приведения в движение плавникообразного пропеллера; фиг. 2 - вертикальный разрез видоизменения устройства; фиг. 3 - вид его сверху; фиг. 4 и 5 - видоизменение устройства; фиг. 6, 7 - видоизменение устройства с применением качательного движения; фиг. 8 - то же, с применением двигателя, принимающего участие в качательном движении; фиг. 9 - вертикальный разрез формы выполнения устройства с применением стационарного двигателя и кулисы; фиг. 10 - то же, с применением эксцентрика; фиг. 11 - то же, с применением отдельного регулирующего механизма; фиг. 12, 13, 14 - диаграммы размаха пропеллера для различной ширины крыльев; фиг. 15 и 16 - векторные диаграммы движущей силы; фиг. 17 - диаграмму, изображающую схематическое движение пропеллера.
При форме выполнения устройства по фиг. 1, укрепленный в подшипнике 19 ведущий вал 1 снабжен кривошипом 2 с противовесом 3 и пальцем 4, в отверстии которого устанавливается легко вращающаяся ось 5 пропеллера. Ось 5 связана шарниром 14 с плечом 15 пропеллера, подпертым слегка качательно в шаровом шарнире 16, 18 и несущим на своих концах крылья пропеллера 17. Штанга 6 может свободно вращаться вокруг пальца 4, сквозь который проходит ось 5, несет на себе штифт 8, на саженный на нее в месте 9, и жестко соединена со штангой 7. На пальце 4 жестко укреплено зубчатое колесо 10, на оси 5 пропеллера также жестко укреплено зубчатое колесо 13; зубчатые же колеса 11 к 12, связывающие все устройство в одно целое, могут свободно вращаться вокруг штифта 8. Зубчатые колеса 12 и 13 имеют по равному числу зубцов и колесо 11 имеет вдвое больше зубцов, чем колесо 10.
При вращении вала 1 в подшипнике 19 палец 4, а вместе с ним ось 5 пропеллера, описывает цилиндрический путь. Штанга 6 следует этому движению, но в то же время управляется штангой 7, не могущей принимать участия во вращении, например, идущей на другом конце вдоль неподвижных направляющих, в виде шатуна или так, что штангв 6 выполняется таким образом, что она может двигаться взад и вперед в отверстии кривошипа или т.п. Так как зубчатое колесо 10 жестко сидит на пальце 4, то оно совершает полный оборот за время, в течение которого палец описывает замкнутый путь. Зубчатое колесо 11, свободно сидящее на штифте 8, имеющее двойное число зубцов и удерживаемое штангой 7 от участия во вращении, делает полоборота в противоположном направлении, так же как и колесо 12. Зубчатое колесо 13 делает при этом тоже полоборота, но в том же направлении, что и колесо 10. Ось 5 пропеллера, на которой жестко сидит зубчатое колесо 13, делает, таким образом, при полном обороте пальца 4, половину оборота в том же направлении, чем удовлетворяется условие для движения пропеллера.
При желании заставить движущую силу работать в другом направлении, например, с целью управлять судном, на котором установлен пропеллер, требуется изменить направления движения штанги 7. При вращении штанг 7 и 6 вокруг пальца 4, пропеллер получает изменение своего положения, так что движущая сила возникает в другом направлении, что видно по диаграммам (фиг. 16 и 17).
При желании изменить величину движущей силы в определенном направлении должна быть изменена длина кривошипа 2, определяющего проходимый геометрической осью пропеллера путь.
Это может осуществляться посредством такого выполнения пальца 4, что он может передвигаться по кривошипу и регулироваться (в частном случае - во время работы). Если геометрическая ось оси 5 и вала 1 совпадают, то движущая сила равна нулю, так как геометрическая ось пропеллера при этом находится в покое и пропеллер только вращается (см. векторную диаграмму фиг. 16).
Форма выполнения по фиг. 2 и 3 дает другой способ получения замкнутого пути. Стержень 4, соответствующий пальцу 4 на фиг. 1, жестко связан с двумя эксцентриками 21 и 22, вращающимися в направляющих обоймах 23, 24, соединенных со штангами 25 и 26, проходящими через направляющие 27 и могущими совершать возвратно-поступательное движение. Стержень 4 описывает окружность 20, и кроме того, благодаря двойному эксцентрику, совершает в то же время еще полный оборот в противоположном направлении. Так как ось пропеллера должна совершить полоборота в том же направлении, то движение стержня 4 должно быть замедлено наполовину. Это происходит помощью двух зубчатых колес 28, 29, из которых колесо 28 имеет вдвое меньше зубцов, чем колесо 29. При движении штанги 7 ось 5 пропеллера опять осуществляет движение пропеллера. При выполнении эксцентриков 21, 22 смещаемыми против стержня 4 достигается возможность и при этой конструкции изменять проходимый геометрической осью пропеллера путь, причем нулевое положение достигается тем, что геометрические оси эксцентриков 21, 22 и стержня 4 приводятся к совпадению. Вместо описанной регулировки движения помощью зубчатых колес 28, 29, причем геометрические оси стержня 4 и пропеллерной оси 5 не совпадают, могут, само собой разумеется, применяться и другие передачи, при которых эти геометрические оси смогут и совпадать.
При форме выполнения по фиг. 4 применяются конические зубчатые колеса. Штанга 6 свободно вращается вокруг пальца и жестко соединена со штангой 7 и зубчатым колесом 34; с пальцем 4 жестко соединено зубчатое колесо 33. Пропеллерная ось 5, свободно вращаясь в пальце 4, несет на себе тело 30 с цапфой 31, на которой, свободно вращаются конические зубчатые колеса 32. Зубчатые колеса 33 и 34 должны иметь одинаковое число зубцов.
При вращении вала 1 штанга 6 будет увлекаться зубчатым колесом, но благодаря штанге 7 не сможет принять участия во вращении. Вследствие этого зубчатые колеса 32 обратятся на зубчатое колесо 34, принуждаемые к тому колесом 33, принимающим участие во вращении. Колеса 32 увлекают тело 30 со скоростью, равной половине скорости колеса 33. Вследствие этого ось 5 пропеллера опять делает полоборота за один оборот пальца 4. Тело 30 может быть выполнено в виде масляной ванны.
При форме выполнения по фиг. 5, движение пропеллера осуществляется помощью зубчатого колеса 35 и зубчатого колеса с внутренними зубцами 36, имеющего вдвое больше зубцов, чем колесо 35. Последнее жестко соединено с пальцем 4, а колесо 36 - с пропеллерной осью 5. Часть 6, в которой устанавливается свободно вращающаяся пропеллерная ось 5 может служить масляной ванной и жестко соединена со штангой 7.
При полном повороте пальца 4 и жестко с ним соединенного зубчатого колеса 35 зубчатое колесо 36 совершает полъоборота в том же направлении, чем удовлетворяется условие для движения пропеллера.
При любой из описанных форм выполнения, можно обойтись без штанги 7, если только часть 6 будет расширена таким образом, что она сможет быть укреплена свободно качающейся, например, карданически. В месте образованной таким образом точки качания сможет производиться управление судном, происходившее раньше помощью штанги 7. Описываемый геометрическою осью пропеллера путь является исключительно конусообразным.
В видоизменении устройства по фиг. 6, с целью сообщения взамен кругового лишь качательного движения оси пропеллера, механизм для сообщения пропеллеру качания выполнен в виде серьги 2, связанной шарнирно одним концом с валом 1, двигающимся вверх и вниз согласно стрелке 38, а другим - со свободным концом оси пропеллера, которая выполнена составной из двух частей 4 и 5, соединенных зубчатой передачей 33, 32, 34, помещенной в вырезах обоймы 37, состоящей из двух половин, соединенных болтами 45.
Механизм для поворота оси пропеллера на полъоборота отделен от первого и выполнен в виде винтовой передачи для поворота кольца 41, связанного универсальными шарнирами 40, 47 на кольцах 39, 41 с обоймой 37. Кольцо 41 снабжено червячным зацеплением и может вращаться в коробке 44 судна.
При вращении вала 43 с червяком 42 будет вращаться обойма 37 и управляться судно. Во время работы геометрическая ось пропеллера может двигаться в плоскости, причем вектор движущей силы, согласно фиг. 15, изменяется от положительного максимума через нуль до отрицательного максимума, т.е. от полной силы вверх через нейтраль до полной силы вниз. При вращении обоймы 37 посредством вала 43 изменяется вектор движущей силы согласно фиг.. 16.
В видоизменении по фиг. 7 вал 4 вращается вокруг удлиненной части 5 оси пропеллера, так что вал 4 не требуется поддерживать обоймой 37. Зубчатая передача установлена над точкой качания 46.
В видоизменении устройства по фиг. 8 пропеллер 17 приводится прямо от качающегося с ним мотора. Путь геометрической оси пропеллера устанавливается при помощи кулисы 2, по которой перемещается жестко сидящий на части 4 оси ползун 48.
Ось пропеллера состоит из двух частей 4, 5, соединенных между собой зубчатой передачей 49, показанной на чертеже схематически и одинаковой с таковой на фиг. 6. В обойме 37, удерживающей составную ось 4, 5 пропеллера, помещен мотор 50, работающий совместно с передачей 49 и установленный посредством универсального шарнира в неподвижной части.
Ось 4, а вследствие этого и вал 7, должен вращаться вдвое скорее оси 5. Форма и конструкция обоймы 37 - любые, например, она может быть шаро- или фермообразной, либо в виде конструкции из дуг или стержней и т.д. Ось 4 может приводиться прямо мотором 50, в том случае, если механизм зубчатой передачи 49 приключен к оси 5 и действует замедляюще именно так, что ось 5 вращается с вдвое меньшей скоростью, чем ось 4. Желательные для судна скорость и число оборотов мотора определяют сочетание мотора 50 и механизма передачи 49. На фиг. 9 и 10 показана форма выполнения устройства со стационарными моторами. Плечо 15 пропеллера гибко соединено при этом с осью 5 посредством связи 58. Вал 1 может быть удален, так как сам мотор образует неподвижную точку, относительно которой производится качание, или посредством эксцентрика 52 (фиг. 10), могущего быть регулируемым для изменения движущей силы согласно фиг. 15, вращающегося, благодаря промежуточному включению удваивающего механизма 49, вдвое быстрее оси 5, или (фиг. 9) помощью косой кулисы 2, по которой движется ползун 48, приводимый гидравлически - помощью цилиндра 59, в котором ходит вверх и вниз поршень 60. Ось 4 вращается во время работы в этом поршне.
Возможны многочисленные видоизменения в конструкции этих форм выполнения. Так, например, на фиг. 10 передающая давление часть 56, 57, вокруг которой в то же время совершается качание, и место, в котором качательное движение сообщается обойме 37, могут обменяться местами, а место укрепления регулирующего механизма 49 может быть изменено, так что либо ось 5, либо ось 4 будут прямо приводиться во вращение. На фиг. 9, где оба вала приводятся моторами - соответственно 50 и 51 - механизм 49 должен располагаться между обоими этими моторами, из которых мотор 57 должен вращаться вдвое быстрее мотора 50. Если оба названных мотора синхронизированы так, что мотор 51 вращается вдвое быстрее мотора 50, то механизм 49 может быть удален; в этом случае частота электрического тока регулирует оба движения пропеллера - вращение и качание.
Управление судном может производиться помощью изменения положения одной из работающих совместно по линии передачи движения частей, вследствие чего диаграмма фиг. 17 претерпевает изменение положения, а движущая сила - изменение направления.
В форме выполнения устройства на фиг. 11 регулирующий механизм 49, взамен зубчатой передачи 49, устанавливается в любом месте вне пропеллера. Вращение пропеллера разделяется от качательного движения в точке качания помощью кардановского соединения 64. Качательное движение сообщается пропеллеру посредством кулисы 2, в которой установлен подвижный прямоугольный ползун 48. Плечо 5 пропеллера свободно вращается в ползуне 48. При вращении шкива 61 пропеллеру сообщается качательное движение (если только пропеллер не находится как раз в нейтральном положении), благодаря вращению же шкива 62, пропеллеру сообщается вращение вокруг продольной оси. Если шкив 61 вращается вдвое быстрее шкива 62, то пропеллер выполняет желаемое движение. Способ, посредством которого производится регулировка обоих названных движений, может быть взят любым. Где-нибудь по линии 65 передачи движения может располагаться регулирующий механизм 49.
Фиг. 12, 13 и 14 изображают пути слишком малого нормального (кардиоида) и слишком большого пропеллера. На петле (фиг. 12) появятся вредные вихри, в то время, как лежащая налево от точки 0 часть пропеллера (фиг. 14) будет противодействовать при каждом размахе. Форма пропеллера или регулировка его размаха должны быть, вследствие этого, рассчитаны таким образом, чтобы в наивыгоднейшем рабочем состоянии каждая точка противоположных прямых краев пропеллера по возможности описывала кардиоид. Форма крыльев пропеллера получается посредством соединения указанных краев круговыми дугами (фиг. 11). Так как прямые края пропеллера, для правильного действия, остро отточены только с одной стороны, то изготовленный таким образом пропеллер связан с определенным направлением вращения.
Настоящее изобретение предназначается для применения как на воздушных судах, так и на кораблях и не ограничивается приведенными в настоящем описании конструкциями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для печатания делений и цифр на тесьмяных рулетках | 1930 |
|
SU25612A1 |
| Машина для измерения площади жестких кож | 1932 |
|
SU42703A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОЛУЧЕНИЯ ПОЗИТИВНЫХ ОТПЕЧАТКОВ | 1929 |
|
SU31758A1 |
| Прибор для получения расцвеченной ткани на вязальных машинах | 1929 |
|
SU14381A1 |
| Полировальный станок | 1931 |
|
SU33422A1 |
| КОВОЧНЫЙ АГРЕГАТ ДЛЯ ПРОТЯЖКИ ШТАНГ | 1991 |
|
RU2010656C1 |
| СПОСОБ ОБРАБОТКИ НА КОПИРОВАЛЬНОМ СТАНКЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ ЛЫЖ, ПРОПЕЛЛЕРОВ И Т. П. | 1929 |
|
SU35106A1 |
| Гребной винт с переменным шагом | 1925 |
|
SU1312A1 |
| Станок для точки сферических поверхностей (стеклянных линз) | 1928 |
|
SU23145A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
1. Устройство для приведения в движение плавникообразного пропеллера, геометрическая ось которого описывает замкнутый путь, во время совершения которого пропеллер поворачивается на полъоборота около указанной оси, отличающееся тем, что для того, чтобы каждая точка геометрической оси пропеллера описывала замкнутую круговую линию, а сам пропеллер при том совершал полоборота, применены два отдельных механизма, из коих один, первый, шарнирно связан со свободным концом оси пропеллера для сообщения ей лишь вышеуказанного перемещения по круговым замкнутым кривым, а другой, второй, предназначен своим воздействием на орган первого механизма, шарнирно связанный с концом оси пропеллера, производить ее поворот на полъоборота.
2. Форма выполнения устройства по п. 1, отличающаяся тем, что первый механизм выполнен кривошипным 3, 2, 4, 5, (фиг. 1, 4 и 5), а второй - в виду зубчатой передачи с применением связывающей их также штанги 6, 7.
3. Форма выполнения устройства по п. 2, отличающаяся применением, взамен кривошипного механизма, двух эксцентриков 21 и 22 (фиг. 2 и 3), соединенных стержнем 4, заменяющим палец 4, и помещенных соответственно в обоймах 23 и 24, могущих совершать возвратно-поступательные движения.
4. Видоизменение устройства по п. 1, применяемое с целью сообщения взамен кругового лишь качательного движения оси пропеллера, отличающееся тем, что первый механизм выполнен в виде серьги 2 (фиг. 6 и 7), шарнирно связанной со свободным концом оси пропеллера, выполненной составной из двух частей 4 и 5, соединенных зубчатой передачей, помещенной в вырезах составной обоймы 37, а второй механизм отделен от первого и выполнен в виде винтовой передачи для поворота кольца 41, связанного универсальным шарниром 40, 47 с обоймой 37.
5. Видоизменение устройства по п. 1, отличающееся тем, что первый механизм выполнен в виде кулисы 2, в которой может перемещаться ползун 48 (фиг. 8), связанный со свободным концом оси пропеллера, состоящей из двух частей 4 и 5, соединенных между собой зубчатой передачей 49, подобной указанной в п. 4, а второй механизм выполнен независимым от первого механизма и представляет собой движущий орган или мотор 50, работающий совместно с указанной передачей 49, помещенный в обойме 37, удерживающей составную ось 4, 5, и установленный посредством универсального шарнира в неподвижной части.
6. Форма выполнения устройства по п. 5, отличающаяся тем, что взамен перемещающегося вместе с осью пропеллера мотора 50 применен стационарный мотор 30 (фиг. 9 и 10), а первый механизм выполнен или также в виде кулисы 2 (фиг. 9), или в виде эксцентрика 52 (фиг. 10).
7. Форма выполнения устройства по п. 5, отличающаяся тем, что взамен передачи 49 установлен вне пропеллера регулирующий механизм 49 (фиг. 11), служащий для приведения во вращение при посредстве шкивов 61 и 62 первого механизма и универсального шарнира второго механизма.
