1
11зобретенпе отиосится к области весоизмерительной техники.
Мзвестны автоматические весоизмерительные устройства, содержащие коромысло с системой уравновешивания, узлом гиреиаложения и изолируюидим механизмом, связанным с узлом предварительного взвешивания, и блок управления в виде узла задания программы, апалого-цифрового преобразователя, сумматора, запомииаюш,ей ячейки и ключей.
Для повышения быстродействия в предлагаехо.м устройстве в блоке управления вход аналого-цифрового преобразователя соединен с узлом предварительного взвешиван,я и ус1лителем системы уравновешивания коромысла, а его выход соедииен с узлом гиреналожения и сумматором через ключи, управляемые узлом задания программы.
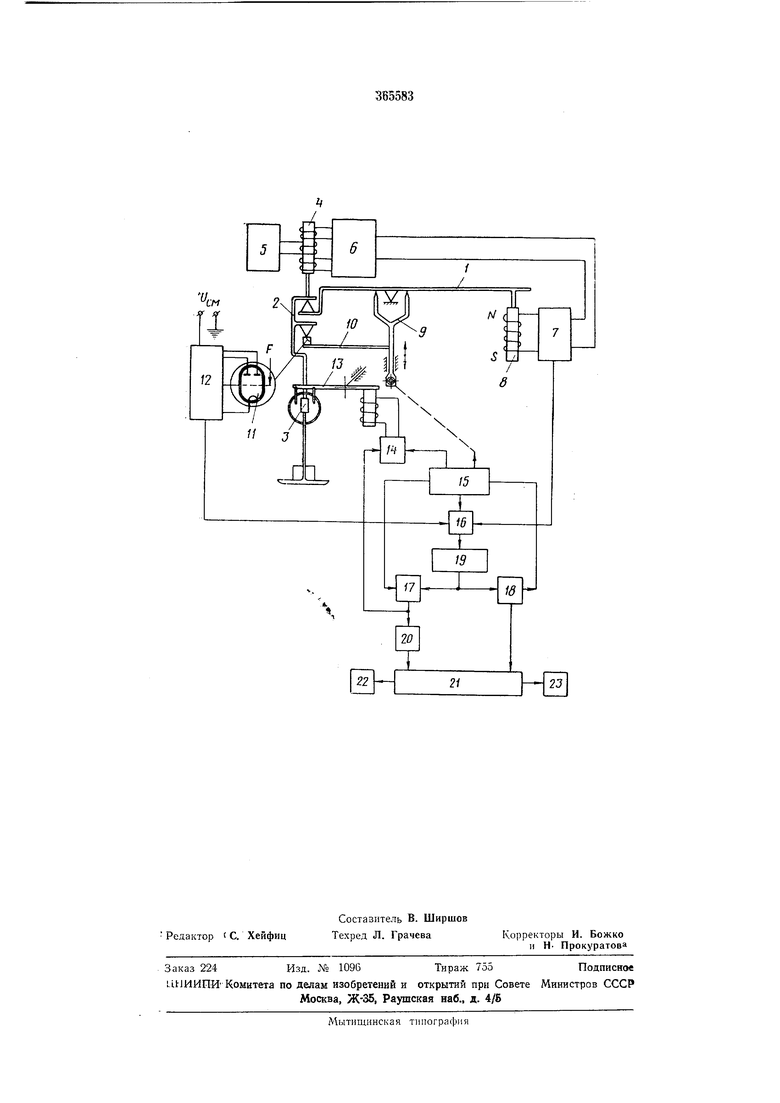
На чертеже показано описываемое устройство.
Коромысло / снабжено грузоприемной подвеской 2, на которой крепятся рейка 3 с комплектом встроенных гирь и ферритовый сердечник 4, свободно перемещающийся вдоль оси неподвижно закрепленной катушки дифференциального индуктивного датчика, состояи,его из высокочастотного генератора 5 и дифференциального выпрямительного блока 6, соедтшенного со схемой автоматического уравновешивания, состоящей из усилителя 7 и преобразователя 8.
Изолирующий механизм 9 снабжен упругой опорой 10 с укрепленным на ней датчиком 11 перемещений, например механотроном, узла 12 предварительного взвешивания. Узел 13 гиреналожения приводится в действие от блока 14 автоматического гиреналожепия.
Узел 15 задания программы управляет исполиптельнымп механизмами и элементами схемы через ключи 16, 17 и /8. Аналого-цифровой преобразователь 19 представляет в цифровой форме аналоговый сигнал, являющийся мерой массы груза.
Результат предварительного взвешивания фиксируется запоминающей ячейкой W и суммируется с результатом окончательного взвешивания сумматором 2/.
Общий результат фиксируется цифровым индикатором 22 с документальной регистрацией на цифропечатающем устройстве 25.
Работает описываемое устройство следующим образом.
При наложении образца на грузоприемную подвеску 2 при заарретированном коромысле / силовое воздействие массы образца передается на датчик И перемещений (механотрон), укрепленный на упругой опоре 10 изолирующего механизма 9. При этом на выходе узла предварительного взвешивания появляется напряжение, являющееся грубой мерой массы образца. Подача в узел 12 постоянного напряжения смешения И см (в пределах погрешности датчика 11) исключает в дальнейшем необходимость введения отрицательной корректирующей поправки.
Результат предварительного взвешивания в виде выходного напряжения через ключ 16 ноступает на аналого-цифровой преобразователь 19, откуда уже в цифровой форме передается через ключ /7 на запоминающую ячейку 20 и блок автоматического гиреналожеиия, который прпводпт в действие узел 13 гиреналожеиия, осуществляющий съем гирь с рейки 3 в соответствии с результатом предварительного взвешиваиия.
Таким образом, до того как изолирующий механизм будет открыт, момент вращения, создаваемый весом образца, компенсируется мо|ментом вращения, создаваемым весом снятия гирь, масса которых определена при предварительном измерении с некоторой погрешностью, вносимой датчиком перемещений (механотроном) и не превыщающей напряжение смещения И см.
При отклонении коромысла с выхода дифференциального индуктивного датчика, состоящего из высокочастотного генератора 5, ферритового сердечника 4 и дифференциального выпрямительиого блока 6, иа усилитель 7 системы автоматического уравновешивания поступает сигнал разбаланса, и через обмотку катушки преобразователя 8 протекает ток, пропорцнональный массе, не уравновешенной на предварительном этапе. Напряжение, являющееся аналогом этой массы, поступает с выхода усилителя 7 на вход аиалого-цифровою преобразователя 19 через ключ 16 и с преобразователя 19 в цифровой форме передается
через ключ 18 для суммирования с результатом предварительного взвешивания в сумматор 21. Отсчет окончательного результата взвешивания производится по цифровому индикатору 22 с одновременной документальной регистрацией на цифропечатающем устройстве 23.
Применение упругой оноры, жестко связаниой с изолирующим механизмом, и датчика перемещений, включенного по описанной выше схеме, позволяет исключить коромысло из участия в процессе предварительного взвешивания, что существенио сокращает затраты времеии иа наиболее трудоемком этапе. Использование коромысла для окончательного взвешивания, когда неуравновешенная масса образца мииимальиа, увеличивает долговечность и надежиость весов, сокращая время работы контактных пар призма - подушка.
Предмет изобретения
Автоматическое весоизмерительное усгройство, содержащее коромысло с системой уравновешивания, узлом гиреиаложеиия и изолирующим мехаиизмом, связанным с узлом предварительного взвешивания, и блок уиравлеиия н виде узла задания программы, аналого-цифрового преобразователя, су.мматора, заноминаю щей ячейки и ключей, отличающееся i&u, чтО с целью увеличения быстродействия, в нем гз блоке управления вход аналого-цифрового преобразователя соеди(еи с узлом претварлтельиого взвешиваиия и усилителем систе.мы уравновешивания коромысла, а его выход сое линей с узлом гиреналожения и сумматоро ; через ключи, управляемые узлом задания программы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| АВТОМАТИЧЕСКИЕ АНАЛИТИЧЕСКИЕ ВЕСЫ С ЦИФРОВЫМ ОТСЧЕТОМ | 1971 |
|
SU318832A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| Автоматическое весоизмерительноеуСТРОйСТВО | 1979 |
|
SU851107A1 |
| Весоизмерительное устройство | 1974 |
|
SU510654A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |