о
05
СП
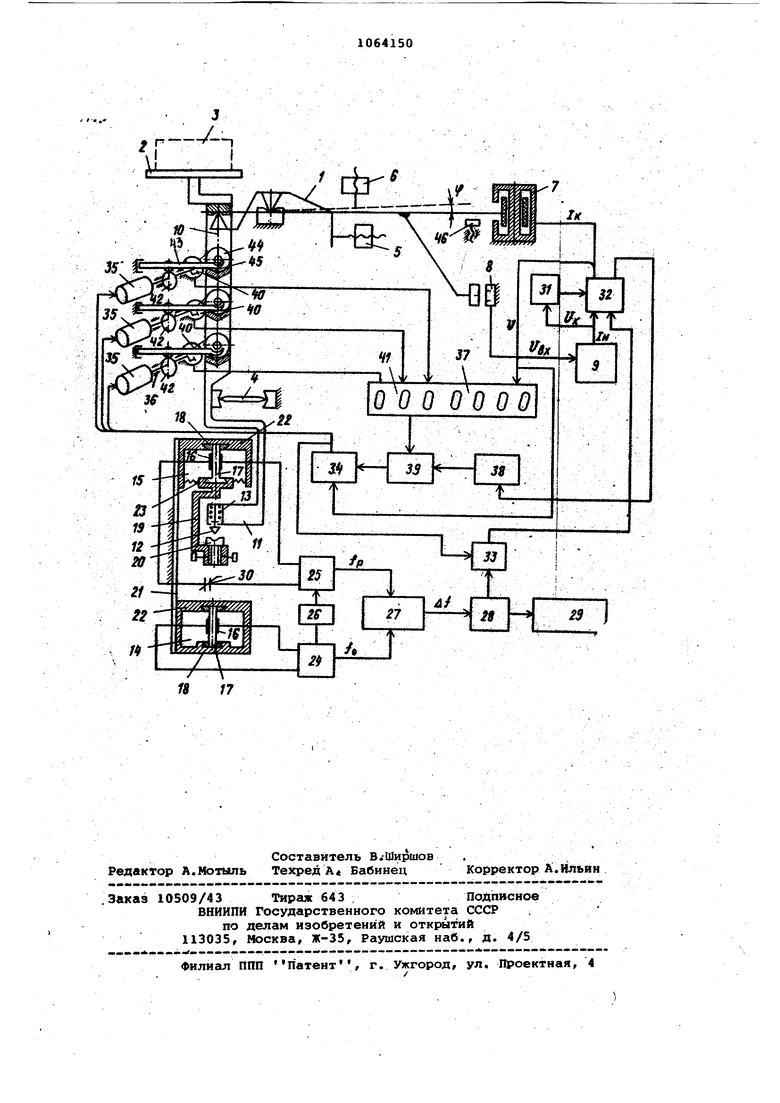
о Изобретение относится к весам с предварительным грубым уравновешиванием нагрузки, содержащим коро млсло .с системой управления и механизм гиреналожения. Известно устройство, которое имеет невысокую точность и низкое быстродействие поскольку механизм предварительного взвешивания сложе а функциональные блоки управления, инерционны Л Наиболее близким к предлагаемом по технической сущности является автоматическое весовое устройство содержащее коромысло с подвеской и системой уравновешивания и узел предварительного взвеишвания в вид опорного и рабочего пьезорезонансных датчиков jjZJ . Известное устройство не обеспеч вает требуемую точность измерения так как подвеска при точном измерении не изолирована от элементов предварительного взвешивания. Цель изобретения - повышение то ности взвешивания за счет исключения кинематических и электрических связей подвески с узлом предварительного взвешивания при точном из мерении. Поставленная цель достигается т что в автоматическом весовом устро стве, содержащем коромысло с подвеской и системой уравновешивания и узел предварительного взвешивани IB виде опорного и рабочего пьезорезонансных датчиков, подвеска сна жена приставкой с конусным наконеч ником, а рабочий пьезорезонансный датчик снабжен рычагом с призмой рабочая поверхность которой расположена по оси подвески под конус нь1м наконечником. . На чертеже показана схема устройства. Устройство содержит коромлсло 1 с грузоприемной чашкой 2 для груза 3, ограничительный шарик 4 (стр ну) , тарировочные и регулировочные устройства 5 и б, компенсатор 7, датчик 8 разбаланса, усилитель 9. Подвеска 10 снабжена приставкой 11 с конусным наконеиником 12, поджатым пружиной 13, для смягчения у;с1арных нагрузок. Опорный 14 и рабочий 15 пьезорезонансные датчики содержат электроды 16 возбуждения с пьезоэлементами 17, закрепленными в накладках 18. Пьезоэлемент 17 рабочего датчика 15 связан через рычаг 19 с V-образной призмой 20, расположенной в плоскости пьезоэлемента и под наконечником 12. Датчики 14 и 15 расположены симмет рично на основании 21. Пьезоэлемент 17 рабочего датчика 15 расположен в герметичном корпусе 22, за крытом гибкой диафрагмой 23. . Устройство снабжено опорным 24 и рабочим 25 aBToreHepaTOpaNra, блоком 26- питания, блоком 27 формирования разностной частоты, преобразователем 28 частоты в код, цифровым индикатором 29 значения грубой оценки измеряемой массы груза 3, конденсатором 30 подстройки, пороговой схемой 31, отключающей через ключ 32 Компенсатор 7 от усилителя 9. Преобразователь 28 частоты и код через первый ключ 33 и второй ключ 32 связан со схемой 34 запуска электродвигателей 35 механизма 36 гиреналожения, с компенсатором 7 и отсчетным блоком 37, запоминающим устройством 38 и схемой 39 сравнения, связанной со схемой 34 запуска. Механизм 36 гиреналожения снабжен датчиками 40 угловых перемещений, связанными с цифровыми индикаторами 41 старших декад отсчетного блока 37, с кулачками 42, взаимодействующими с рычагами 43, с помощью которых гири 4 4 снимаются с конических фиксаторов 45 подвески 10. Для ограничения перемещения коромысла предусмотрен регулируемой упор 46. Устройство работает следующим образом. . На чашку.2 накладывают взвешиваемый груз 3, коромысло 1 наклони- . ется на угол tf и с датчика 8 разбаланса подается сигнал Vpx на усилитель 9, вырабатывающий компенсационный ток 3ц для компенсатора 7 и выходной сигнал V для отсчетного блока 37. При массе груза 3 меньшей предела точного взвешиванця выходной сигнал Vj с усилителя 9 не превышает порогового значения пороговой схемы 31 и ток через ключ 32 считывается с младших декад отсчетного блока 37. При массе груза 3 большей предела точного взвешивания сигнал VK с усилителя 9 превышает пороговое значение пороговой схемы 31 и ключ 32 отключает компенсатор 7 от усилителя 9. Подвеска 10 перемещается вниз до упора конусного наконечника 12, в V-образную призму 20, расположенную в плоскости пьезоэлемента 17 рабочего пьезорезонансного датчика 15. При нажатии наконечника 12 на V -образную призму 20 происходит.изменение параметров пьезоэлемента 17 15 и на выходе рабочего автогенератора 25 появляется сигнал ip, отличный от сигнала io , с опорного автогенератора 24, так как в исходном положении fj, а fp, что достигается с помощью конденсатора 30 подстройки. С выхода блока 27 формирования разностной частоты снимается сигналд{ 1р -1о/ пропорциональный нагрузке на чашке, и обрабатывается
преобразователем 28 частоты в код, зачтем подается на ключ 33 и цифровой индикатор 29, регистрирующий грубое значение массы груза 3. С ключа 33 сигнал поступает при открытом ключе 32 на запоминающее устройст6о 38, и схему 39 сравнения, куда поступает информация с механизма 36 гиреналожения через датчики 40 угловых перемещений, электрически связанные с цифровыми индикаторами 41 старших декад отсчетного блока 37. В случае несоответствия поступающих, сигналов с преобразователя 28 частоты в код и с механизма 36 гиреналожения включается схема 34 запуска электродвигателей 35 механизма 36 гиреналожения и происходит снятие гирь 44 с конических (фиксаторов 45 подвески 10 до тех ПОР, пока массаснятых гирь не будет соответствовать значению массы на цифровом индикаторе29. Снятие необходимого количества гирь, масса которых равна грубому весу груза 3,приводит коромысло в зону действия компенсатора 7 (зону точного взвешиваний), срабатывает пороговая схема 31, отключая ключом 32 запоминающее устройство 38 от преобразователя 28; частоты в код и подключая компенсатор. 7 к усилителю 9, и происходит точное взвевгаванне.
Значение измеряемой массы считывается с отсчетного блока 37 с . цифровых индикаторов 41 стариих декад отсчетного блока - значение массы гирь 44, снятйх с подвески, с младших - остаточный разбаланс, нескомпенсированный гирями, пропорциональный току 3и компенсатора 7,
При снятии груза 3 с чашки .2 сигнал Vjj с усилителя 9 превышает значение порогового сигнала пороговой 5 схемы 31, которая перебрасывает
ключ 32 и подключает преобразователь ,28 частоты в код к запоминающему устройству 38 и схеме 39 сравнения. Поскольку наконечник 12 выходит 0 из контакта с V -образной призмой 20, то ul О, ip гfо , и на цифровом , индикаторе 29 появляются нули, включается схема 34 запуска электродвигателей 35 механизма 36 гиренало5 жения.и гири 44, снятые с подвески при грубом эзвешивании, автоматически накладывгиотся на подвеску 10, . возврсшая устройство в исходное положение равновесия.
Применение опорного и рабочего пьезорезонансиых датчико в, опорного и рабочего автоген|ёраторов, блока формирования зазностей частоты, преобразователя часто ы код, св:язанного .с цифровым индикатором, со схемой запуска электродвигателей механизма гиреналожения и с компенсатором, приставки с конусным наконечником на подвеске, V -рФразной призмы ha рычаге пьезрэлемента рабочего датчика, позволяет в предлагаемом устройстве приме{|ить простые функциональные блоки с малой инерционностью, исключить изолирующий мехайнзм, что повыиает точность изменения и быстродействие. ,,-
Я 17 /-:
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Механизм гиреналожения большегрузных весов | 1979 |
|
SU859823A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1420417A1 |
АВТОМАТИЧЕСКОЕ ВЕСОВОЕ УСТРОЙСТВО, содержащее коромысло с ,лодвеской и систекюй уравновешивания и узел предварительного взвешивания в виде опорного и рабочего пьезорезонансных датчиков, о т л и ч а ю щ е ее я тем, что, с целью повышения точности взвешивания эа счет исключения кинематических и электрических связей подвески с уэлом предварительного взвешивания при точном измерении, подвеска снабжена приставкой с конусным наконечником, а рабочий пьезо1 езонансный датчик снабжен рычагом с призмой, р абочая поверхность которой расположена по оси подвески под конусным наконечником.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БМЬЛИОТ^НЛ | 0 |
|
SU365583A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ;, 2 | |||
| Сарахов А.И | |||
| Весы в физикохимических исследованиях | |||
| М., На- , ука, 1968, с,157-161 (прототип). | |||
