Известны копировальные устройства, в которых привод с дискретными исполнительными элементами, например, электромагнитными муфтами, связан со схемой управления привода и копировальным датчиком с непрерывным сигналом на выходе.
Эти устройства широко применяются в копировальных металлорежущих станка (фрезерных, токарных и т. д.). Копирование контура иа таких станках осуществляется путем переключения подач «на контур и «от контура при переходе щупа копировального датчика через границу между зонами его взаимодействия с копируемым контуром, причем при двухзонном копировании ближней к контуру зоне соответствует подача «от контура, а другой - «на контур.
Граница между зонами определяется конструкцией копировального датчика, например, величиной зазора между контактами и ие регулируется в процессе обхода контура.
При переключении подач имеют место выбеги рабочих органов станка, увеличивающиеся с увеличением подачи. В пределах сектора (квадранта) направления работающих подач не изменяются, а величины выбегов по каждой из координат примерно постоянны для установленной подачи. Однако величина перемещения щупа датчика (инструмента) по нормали к копируемому контуру, вызванного
выбегом исполнительных органов станка, изменяется при обходе криволинейного контура (для удобства рассмотрения, здесь и ниже говорится о перемещении щупа датчика
относительно контура).
Это обстоятельство приводит к геометрическому искажению контура обрабатываемой детали по сравнению с копируемым, что существенпо снижает точность обработки.
Известен способ исключения этого искажения, который сводится к автоматическому регулированию соотношения между зонами изменением параметра, определяющего границу между ними, в зависимости от результата
сравнения фактической величины непрерывного сигнала на выходе датчика в конце выбега с заданной.
С целью повыщения точности копирования на станках с дискретными исполнительными
элементами предлол енное копировальное .устройство снабжено корректирующим устройством, выполненным в виде блока сравнения, к входу которого через блок запоминания подключен выход копировального датчика, а
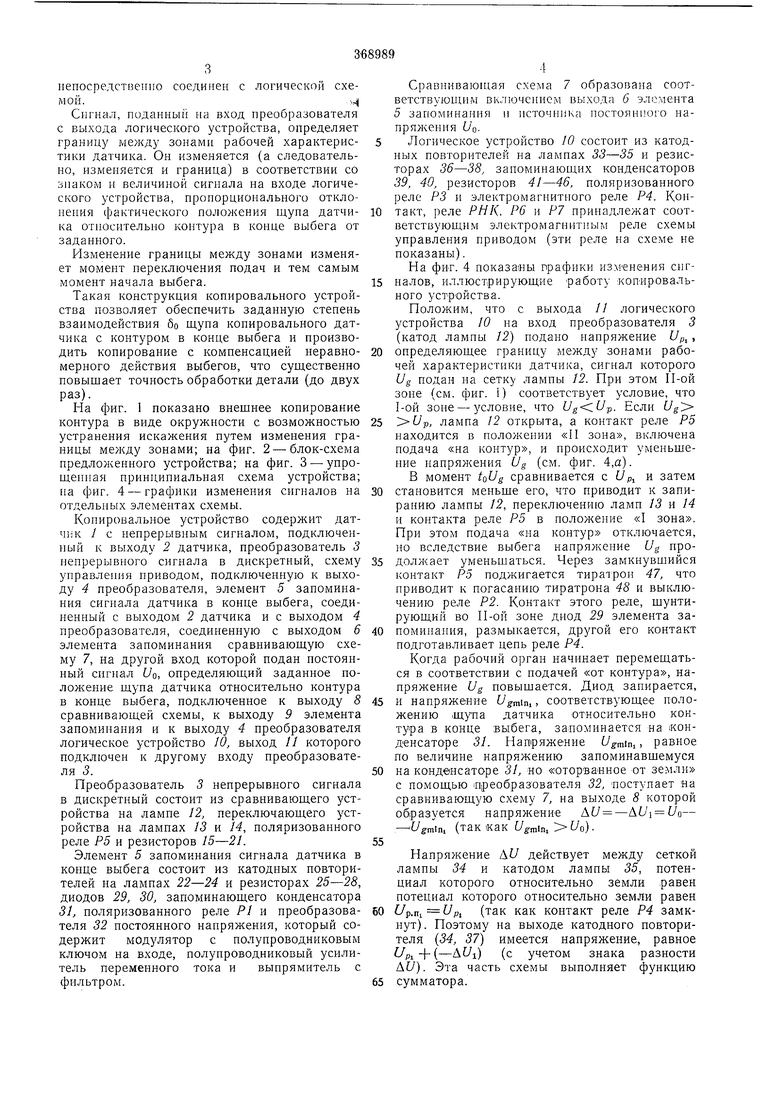
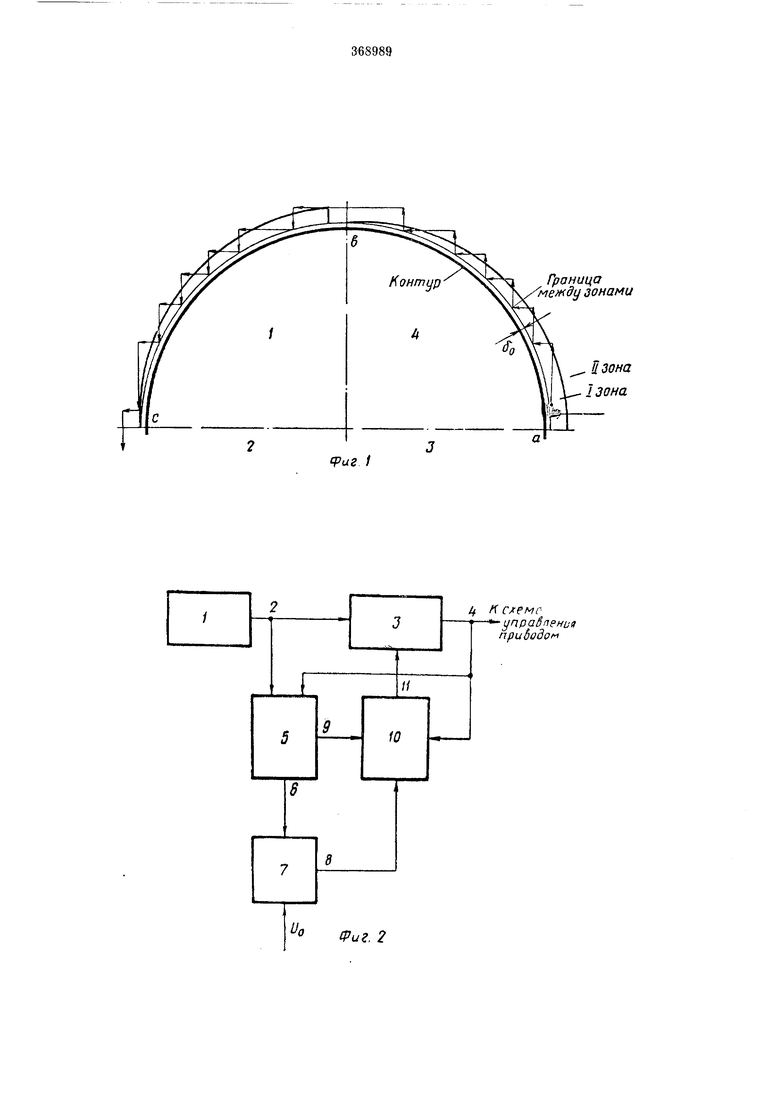
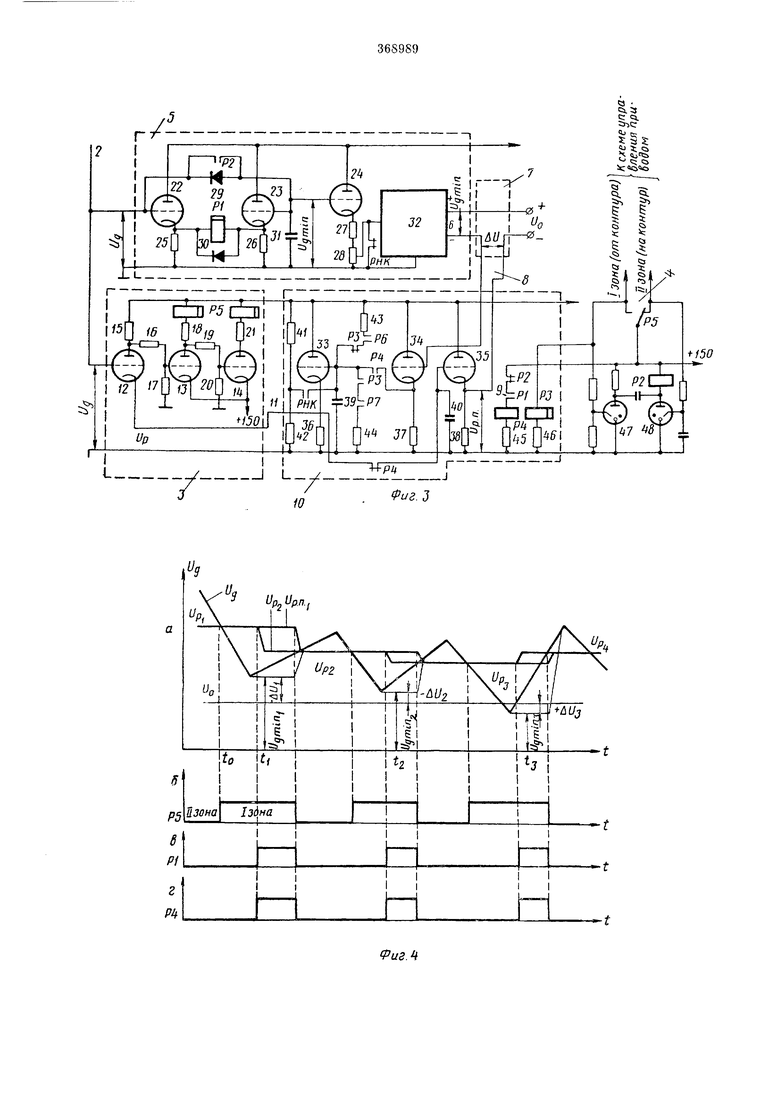
выход блока сравиеиия подключен к схеме управления приводом через логическую схему и преобразователь, причем выход преобразователя подключен к соответствующим входам блока запоминания и логической схемы, а один из выходов блока запоминания непосредственно соединен с логической схемой.:, Снгнал, ноданный на вход преобразователя с выхода логического устройства, определяет границу между зонами рабочей характеристики датчика. Он изменяется (а следовательно, изменяется и граница) в соответствии со знаком н величиной сигнала на входе логического устройства, пронорционального отклонения фактического положения uj,yHa датчи- 10 ка относительно контура в конце выбега от заданного. Изменение границы между зонами изменяет момент переклЕОчения подач и тем самым момент начала выбега. Такая конструкция копировального устройства позволяет обеспечить заданную степень взаимодействия бо щупа копировального датчика с контуром в конце выбега и производить копирование с компенсацией неравно- 20 мерного действия выбегов, что существенно повыщает точность обработки детали (до двух раз). На фиг. 1 показано внещнее копирование контура в виде окружности с возможностью 25 устранения искажения путем изменения гравиды между зонами; на фиг. 2 - блок-схема предложенного устройства; на фиг. 3 - упрощепная принципиальная схема устройства; на фиг. 4 - графики изменения сигналов на ЗО отдельных элементах схемы. Копировальное устройство содержит датчик / с непрерывным сигналом, подключенпый к выходу 2 датчика, преобразователь 3 иепрерывного сигнала в дискретный, схему 35 управления приводом, подключенную к выходу 4 преобразователя, элемент 5 запоминания сигнала датчика в конце выбега, соединенный с выходом 2 датчика и с выходом 4 преобразователя, соединенную с выходом 6 40 элемента запоминания сравнивающую схену 7, на другой вход которой подан постоянный сигнал UQ, определяющий заданное полол ение щупа датчика относительно контура в конце выбега, подключенное к выходу 5 45 сравнивающей схемы, к выходу 9 элемента запоминания и к выходу 4 преобразователя логическое устройство 10, выход // которого подключен к другому входу преобразователя 3. Преобразователь 5 непрерывного сигнала в дискретный состоит из сравнивающего устройства на лампе 12, переключающего устройства на лампах 13 и 14, поляризованного реле Р5 и резисторов 15-21. Элемент 5 запоминания сигнала датчика в конце выбега состоит из катодных повторителей на лампах 22-24 и резисторах 25-28, диодов 29, 30, запоминающего конденсатора 31, поляризованного реле Р1 и преобразова- БО теля 32 постоянного напряжения, который содержит модулятор с полупроводниковым ключом на входе, полупроводниковый усилитель переменного тока и выпрямитель с фильтром.65 15 50 Сравниваюн1ая схема 7 образована соответствующим включением выхода 6 элемента 5 запоминания и источника постоянного напряження UQ. Логическое устройство 10 состоит из катодных повторителей на лампах 33-35 и резисторах 36-35, запоминающих конденсаторов 39, 40, резисторов 41-46, поляризованного реле РЗ н электромагнитного реле Р4. Контакт, реле РНК, Р6 н Р7 принадлежат соответствующим электромагнитным реле схемы управления приводом (эти реле на схеме не показаны). На фнг. 4 показаиы графики изменения снгналов, иллюстрирующие работу копировального устройства. Положим, что с выхода // логического устройства 10 на вход преобразователя 5 (катод лампы 12} подано напряжение Lp, , определяющее границу между зонами рабочей характеристики датчика, сигнал которого Ug подан на сетку лампы 12. При этом П-ой зоне (см. фиг. 1) соответствует условие, что 1-ой зоне - условие, что Ug.Up. Если Ug U-p, лампа 12 открыта, а контакт реле Р5 находится в положении «II зона, включена подача «на контур, и происходит уменьшение напряжения IJg (см. фиг. 4,а), В момент tuUg сравнивается с t/p, и затем становится меньще его, что приводит к запиранию лампы 12, переключению ламп 13 и 14 и контакта реле Р5 в положение «I зона. При этом подача «на контур отключается, но вследствие выбега напряжение Ug нродолжает уменьщаться. Через замкнувщийся контакт Р5 поджигается тиратрон 47, что приводит к погасанию тиратрона 48 и выключению реле Р2. Контакт этого реле, щунтирующий во П-ой зоне днод 29 элемента запоминания, размыкается, другой его контакт подготавливает цепь реле Р4. Когда рабочий орган начинает перемещаться в соответствии с подачей «от контура, напряжение Ug повыщается. Диод запирается, и напряжение /7g-min,, соответствующее положению щупа датчика относительно контура в конце выбега, запоминается на конденсаторе 31. Напряжение Ugmin,, равное по величине напряжению запоминавщемуся на конденсаторе 31, но «оторванное от земли с помощью 1нреобразователя 32, поступает на сравнивающую схему 7, на выходе 8 которой образуется напряжение А(7 f/o- .n, (так как , ). Напряжение At/ действует между сеткой лампы 34 и катодом лампы 35, потенциал которого относительно земли равен потециал которого относительно земли равен Up.n,Up, (так как контакт реле Р4 замкнут). Поэтому на выходе катодного повторителя (34, 37) имеется напряжение, равное pi + (-Af/i) (с учетом знака разности Af)). Эта часть схемы выполняет функцию сумматора.
В момент ti срабатывает реле PI, к которому приложено разностное напряжение Ug-f/ min, и реле Р4. Напряжение t/, на выходе // логического устройства приобретает новое значение Up,, U,, , так как конденсатор 39 на входе катодного реле Р4 заряжается до значения напряжения на выхОлТ.е катодного повторителя 34, 37. При этом на выходе катодного повторителя 35, 38 запоминается напряжение Р.П Up, (т. е. напряжение, соответствующее границе между зонами до коррекции), так как контакт реле Р4 на входе этого повторителя размыкается.
Таким образом производится изменение границы между зопам на величину ошибки между фактическим положением датчика относительно коптура в конце выбега и заданным. Когда Ug становится больше t/p,. , происходит переключепие контакта реле Р5 в положение «II зона, включение реле Р2 и выключение реле Р4. При этом шунтируется диод 29, и панряжение па конденсаторе 31 сравнивается с напряжением Ug, а па конденсаторе 39 запоминается напряженке Up, , которому булТ,ет равно и напряжение на выходе катодного повторителя 35, 38 (после замыкания контакта реле Р4).
На этом цикл коррекции заканчивается. При следуюцдем движении «на контур процесс коррекции повторяется. Таким образом, на основе анализа положения датчика относительно контура в конце предыдущего выбега корректирующее устройство изменяет границу между зонами (момент отключения подачи «па контур) для того, чтобы при последующем выбеге датчик оказался в заданном положении.
Процесс копирования контура начинается при f7, f/pmax благодаря тому, что вход катодного повторителя 33, 36 подключен через п. 3. контакт реле РНК, к-делителю 41,42. Это необхоллмо для того-, даже при мг1КС 1мал1 1 ом , соответствующем верхнему допустимому значению подачи, датчик оказался в районе заданного положения. После этого начинает работать корректирующее устройство, и датчик в конце выбегов будет поддерживаться в заданном положепии относительно контура.
При переключении секторо r iainma между зоиами изменяется скачком (см. фиг. 1). Это происходит следующим образом.
Если идет внешнее нереключение секторов, когда датчик находится во И зоне, включается реле Р6, и через н. з. контакт реле РЗ конденсатор 39 быстро заряжается (т 43-Сз9), при этом также нзменяется напряжение на выходе 11, определяющее границу между зонами. Возрастанпе напряжения происходит до тех пор, пока Up не станет Ug, что вызывает запирание лампы J2 и переключение контакта реле Р5 в положение «I зона. При этом включается реле РЗ, и происходит фиксация нанряження U,,. Таким образом происходит привязка изменения границы к величипе последнего выбега (от контура) в предыдущем секторе.
Проведенные испытапия копировального устройства с коррекцией показали значительное повышенне точности обработки деталей (до двух раз) по сравнению с обработкой без коррекции.
П р е д е т и з о б р е т е н и я
Копировальиое устройство, в котором привод с дискретны исполнительными элементамн, например, электромагнитными муфтами, связан со схемой управлепия привода и копировальным датчиком с непрерывным сигналом на выходе, отличающееся тем, что, с целью повышения точности копировання, оно снабжено корректирующим устройством, выполненным в впде блока сравнения, к входу которого через блок запоминания подключен выход копировального датчика, а выход блока сра15пенпя подключен к схеме управле П{я приводом через логическую схему и преобразователь, причем выход преобразователя подключен к СОО1 ветстпуюн,им входам блоки загюминаиия и логической , а од;и1 из выходов блока запоминания пепосредствепно соединен с логической схемой.
tpu2 /
Граница -Mefffdy зонами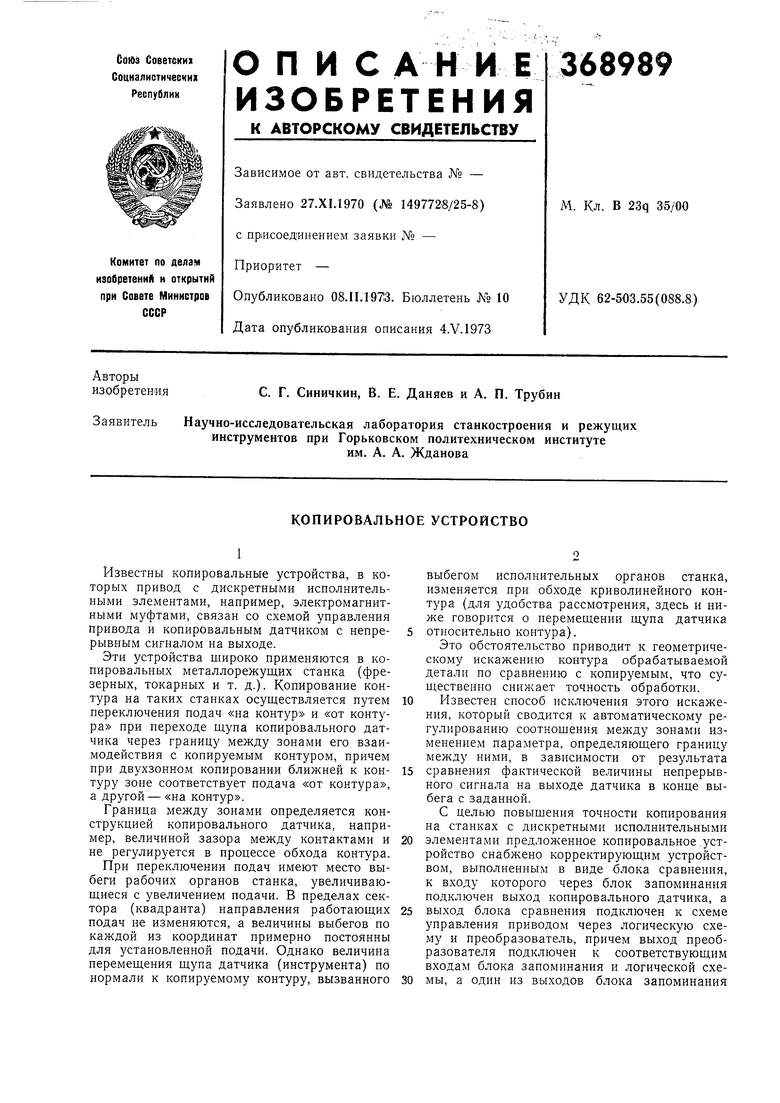
° Фиг. 2
i /Г (jnpaeneHua приЬодом
