(54) СИСТЕМА ДЛЯ
Изобретение относится к устройствам автоматического регулирования нескольких параметров, величины которых в любой мо:мвнт времени должны быть выдержаны в заданном соотношении.
: Известна система регулирования соотношений параметров для технологических процессов, содержащая программное устройство и блоки сравнения. При реализации законов регулирования либо И, либо ПИ, либо ПИД регулирующее воздействие у ( i ) по этим законам примет вид, соответственно:
Kfxdt,
K/dt,
K/xdt Kjx,
где X - рассогласование (мгновенная
ршибка);
kKi-Kj,- коэффициенты пропорциональ;НОСТИ.
В установившемся режиме по окончании переходных процессов мгновенная ошибка X О и регулирующее воздействие
по всем трем законам имеет вид:
у Kf xd-t
Очевидно, что для различных регулирующих воздействий будет различным и значение J Xdt , т.е. значение суммарной, пропущенной ошибки, которая принимает различнью значения в зависимости от ивменения программы или другого возмущающего фактора. Последнее является отрицательнь1м свойством известных систем регулирования . расхода исходных компонентов.
В предлагаемой системе.блок сравнения по каждому каналу выполнен в виде циф Рр ого реверсивного интегрального нульоргана, один вход которого соединен с выходом цифрового задатчика соотношений программного устройства, а с другой - с выходом импульсного датчика расхода исполнительного устройства, один выход нульоргана через цифро-вналоговый преобразо;ватель подключен ко входу компаратора, второй вход которого соединен с аадатчиком, а выход соединен со входом регуляРЕГУЛИРОВАНИЯ СООТНОШЕНИЙ ПАРАМЕТРОВ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
iTOpa, причем Зыкод последнего единен с клапаном испотшитачьного устройства,два других щ 1зсода протиаопополсвых погпосов нуль-органа через логическук) смеху ИЛИ .имеющую два входа, подключены к схеме контроля за,, суммарной ошибкой, выполненной в виде логической схег-лы ИЛИ с числом входов, равным числу регулируемых клапа нов, выход которой подключен к схемам управления генератором производитель :ности программного устройства, насосам 1 исполнительного устройства и сигналиаацией. Такое выполнение дает возможность повысить точность регулирования, надеж,ност работы и упростить систему.
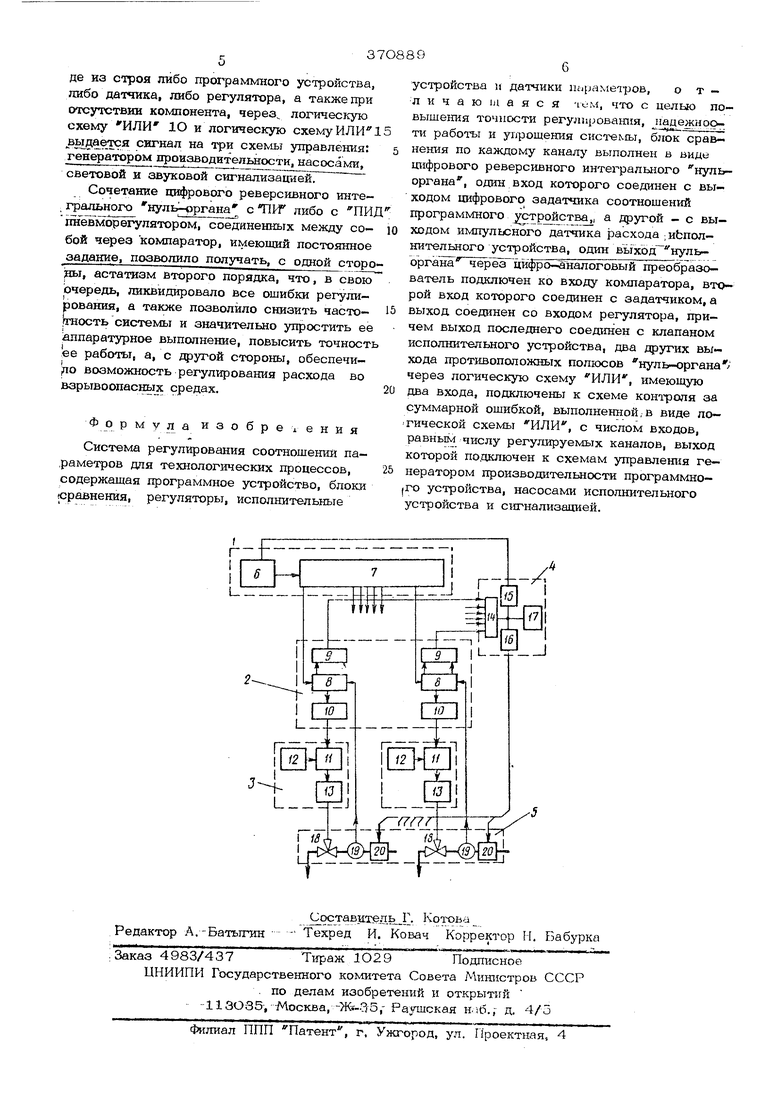
На чертеже показана блок-схема предда гаемой системы, применяемой для смещения нефтепродуктов, где 1 - программное устройство; 2 - блоки сравнения; 3 - рег ляторы; 4 схема контроля за суммарной ошибкой 5 исполнительное устройство.
Программкое устройство выполнено в виде импульсного генератора 6 производи(Тепьности, подключенного к цифровому за- датчику 7 соотношений, в котором с помощью общего трехдекадного интерполятора устанавливают по каждому- каналу требуемое cojотношеш е частот. Блок сравнения выполнен по кааодому каналу з видэ цифрового ревер-j ,сивного интегрального нудь-органа 8, вход которого поддлючен к шгфровому аадатчику соотношеттий, а другой к дат чику 9 расхода. Выходы с противопололшых полюсов нуль-органа 8; соответствующих максималькьгм допустимым ошибкам, яод-« ключены через логическую схему ИЛИ 1О, имеющую два выхода, к схеме 4 контроля за суммарной ошибкой. Счетный выход с нуль-органа через Щ1фро чаналого-пневма-таческий .«реобразоватепь 11 подключен к регуляч ору 3. Посяе.оний состоит из пневматического ПР1 либо ПИД регулятора 12 ;вход которого, подключен к выходу гшевма.тического коьшаратора 13. на один вздад которого подключен выход с .прербразователзТа W. другой - пневматический задатчик 14| Эыход с регулятора 1-.одключен к исполнительному устройству. Схема контроля за суммарной ошибкой
выполнена в виде логическо.й схемы ИЛИ15 с числом входов, равным чиспу регул1фуе мых каналоВг. выход которой поддшючен к зхеме 16 управления генератором производателькостИе .к схеме 17 управления испол- .тетельшлми устройствакет (наоосамг-) и к ;хеме 18 управления световой и звуковой ;данаяизацией. Исполнительное устройство
to каналу выполнено в виде пневмоклапана 19, импульсного датчика 9 расхода и насоса 2G.
Система работает сльдуюш.им образом.
После включения HMriy.ih jHuio pa производительности, при отсу1х;твии максимально допустимых суммарных ошибок, зашюываемызс в нуль-органах 8 каждого дсанала, схема 16 управления дгйет разрешение на поступление имщльсов с генератора 6 на цифровой задатчик 7 соотношений, плавно поднимая при этом частоту ге нератора с минимального значения до требуемого.
С цифрового задатчика 7 соотношений на один из входов нуль-органа каждого канала блока 2 сравнения начинают поступать импульсы, количества которых относятся между собой так же, как заданные соотношения регулируемых расходов смешиваемых компонентов. При нуле ошибки в нуль-органе 8 сигнал на выходе преобразователя 11 равен О, Б кг/см; при максимальной отрицательной ошибке в нуль-органе - 0,2 кг/с
при максимальной положительной ошибке 1,0 кг/см. Сигнал с пневматического за/датчика всегда имеет постоянное значение и равен 0,6 KiVcM.
Таким образом, ири поступлении в нульорган импульсов с программного устройства накапливаегхзя положительная ошибка. Сигнал на выходе преобразователей 11 всех каналов начинает изменяться от 0,6 кг/см в большую стороиу. Возникший сигнал рассогласования S компараторе 13 по ПИ ли бо ПИД закону начшшет поступать на клапан 19 как регулирующее воздействие. Н личие замкнутой обратной связи приведет процесс регул1фоваш1я к установившемуся режиму, т.е. на входе компарао-ора снова будет начальная величина: 0,6к.г/см нуль ошибки. Но так как нуль-орган 8 являетси Интегральным элемен1-ом, то aix) будет также являтьсяН}лем интегралы-юй ошибки
Закон изменения регулирующего воздей, стБИя у имеет вид (при наличии ПИ пневмороАулятора 12):
y-KiJxdt + K JJxdt-dt , в установившемся режиме
У К ,JJ- X dt di ; к - О; J- X {. t - о.
-
Система обладает спойс;твами с11С1хэмы с астатизмом BTOpoi o ц ..1ядка vi позволяет за время переходных процессов непрерывно ликвидгфовать два Ъида 01иибок; ьшноьснные и интегральные.
Схема контроля за ошибкой работает с.ие дующим образог.;.
При возникновении су м«рной onniGi,:: любо1 О ппака в ;побо;л из if.iHa:ujp, пьгию до|пустимо. ире/лелм, что .i:ia.:.:i.:i;-Kno Ш) jM.rxi