(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство для программного управления | 1978 |
|
SU744463A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
I
Изобретение относится к автоматически цифровым многоканальным управляюшим усройствам, использующим.в каждом канале гулирования в качестве iисполнительного органа шаговый двигатель, и может быть использовано для регулирования различного рода параметров, например, расходов нескольких компонентов, взятых в ; определенном соотношении при одновременном и непрерывном их смешении.
Известно устройство для программного управления, содержащее схемы управления, датчик, регулирующий и исполнитепьный блок, выход которого подсоединен к измерительному преобразователю через блок программируемого подавителя помех и задатчика, выполненного в виде двух шаговых двигателей fl .
Однако вследствие присутствия в устройстве нескомпенсированной интегральной ошибки ему свойственна низкая точность регулирования.
Известно также устройство для программного управления, содержащее програ мтк е устройство, лву ;анальное пифровое интегрируюш.ее устройство, сумматор, аналоговый регулятор, датчик скорости и исполнительный орган 2 . Это устройство также имеет недостаточно высокую точность регулирования за счет появления дополнительной ошибки аналогового регулятора (дрейфа нуля интегратора).
Кроме ТОГО, известно цифровое программное устройство, содержащее импульсный генератор, счетчиковый дэлитель с интерполятором, блок переключателей задания, ключи, схему контроля и регулирования ЗЗ . Этому устройству также свойственна недостаточная точность регулирования.
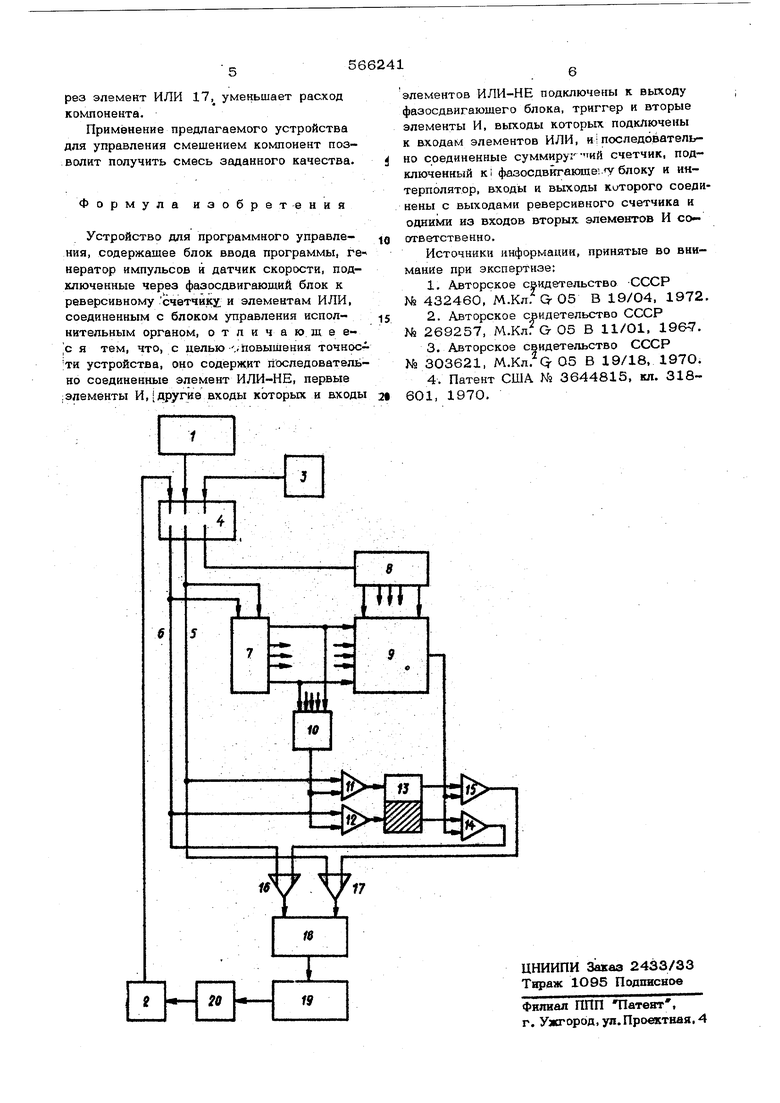
Наиболее близким к изобретению техническим решением является устройство для програ.1много управления, содержащее блок ввода программы, генератор импульсов и датчик скорости, подключенные через фазосдвигающий блок к реверсивному счетчику и элементам ИЛИ, соединенным с блоком управления исполнительным органом . Однако присутствие в устройстве нескомпенсированшй суммарной (интегральной) ошибки снижает его точность. Целью изобретения является повышение точности устройства. Достигается это благодаря тому, что устройство для программного управления содержит последовательно соединенные элемент;: -ИЛИ-НЕ, первые элементы И, другие входы которых и входы элементов ИЛИ-НЕ подключены к выходу фазосдвигаю шего блока, триггер и вторые элементы И выходы которых подключены к входам эле/ментов ИЛИ, и последовательно соединенные суммирующий счетчик, подключенный к фазосдвигаюшему блоку и интерполятор, входы ивыходы которого соединены с выходами реверсивного счетчика и одними из входов вторых элементов И соответстве но. На чертеже. приведена функциональная .схема устройства.. Схема содержит блок 1 ввода программы, датчик скорости 2, генер&тор импульсов 3, которые через фазосдвигак ший блок 4 подключены, соответственно к шине 5 сложения, А шине 6 вычитания реверсивного счетчика 7 и суммирующему счетчику 8. Выходыразрядов суммирующего счетчика 8 в прямом порядке, а выходы разрядов реверсивного счетчика 7 в обратном порядке подключены к вход иатерполатора9,Кроме того выходы реверс ного счетчика 7 объединены элементом ИЛИ-НЕ 10 и подключены к вторым входам первых элементов И 11 и 12, на первые входы которых подключены соответ ственно шины 5 и 6. Выходы элементов 11 и 12 подключены к установочным в.ходам триггера 13. Прямой и инверсный выходь.. триггера I подключены к одним вхо дам вторых двух элементов И 14 и 15, другие два входа которьщ объединены и подключены к- выходу интерполятора 9. Вь ходы элементов И 14 и 15 через первые входы элементов ИЛИ 16 и 17 подключены к блоку управления 18, исполнительному органу 19, который .воздействует на объект регулирования 20. Вторые входь1 элементов 16 и 17 подключены соответственно к шинам 5 и 6. Работа устройства происходит следующим образом. С помодоью блока 1 ввода программы устанавливается задание. Сигнал задания представлен число-импульсным сигналом определенной .частоты. Значение регулиру емого параметра (например, расхода компонента) измеряется датчиком скорости 2 н также, как задание, представлено в виде число-импульсного сигнала.; Обе импул ные последовательности (задания и датчика скорости) поступакп через фазосдвигающий блок 4 и через элементы ИЛИ 16 17 и блок управления 18 в исполннтельный opraii 19, имеющий импульсный двигатель. Импульсы задания по шине 5 обеспечивают прямое вращение импульсного двигателя. При этом управляемый элемент исполнительного органа 19 изменяет свое положение таким образом, что расход комгпонента увеличивается. Импульсы с датчика скорости 2 по шине 6 обеспечивают об-; ратное вращение импульсного двигателя, расход компонента при этом уменьшается. Наличие замкнутой обратной связи приводит устройство в установившийся режим. После пуска устройства для программного управления, первый импульс, поступивший по шине 5 (задание) через элемент И 11 установит триггер 13 в такое положе1йие, при котором удет открыт элемент И 15, а элемент И 14 закрыт. Этот же импульс поступит в реверсивный счетчик7 и запишется в первом разряде. При этом работает элемент ИЛИ-НЕ 10, который снимает разрешающий сигйап на втсь рых аходах элементов И 11, 12, и элементы И 11, 12 закроются. Потенциал с выхода первого разряда реверсивного счетчика 7 откроет в интерполяторе 9 выход последнего разряда счетчика 8 (выход с самой низкой частотой). По мере поступления импульсов по шине 5 частота на;вы.ходе интерполятора 9 растет прямо-пропорционально записанному числу в реверсив-. ном счетчике 7. Так как реверсивный счет-чик 7 фиксирует - интеграл рассогласования сигналов задания и датчика то значение частоты на выходе интерполятора прямо-пропорционально интегралу рассогласования. Триггер 13 устанавливает знак этой частоты (знак интеграла рассогласования). Если количество импульсов задания (с мо мента пуска) преобладает над количеством импульсов; с датчика скорости, то число в реверсивном счетчике 7 считается положительным, знак интеграла положителен, открыт элемент И 15, импульсы с выхода интерполятора 9 поступают через элемент ИЛИ 16 и блок управления 18 на исполнительный орган 19, при «этом, расход компонента увеличивается. И наоборот, если количество импульсов с датчика скорости преобладает над количеством импульсов задания, то число в реверсивном счетчике 7 отрицательное, открыт элемент И 14, знак частоты на выходе интерполятора отрицателен, исполнительный орган, отрабатывая эти импульсы, поступившие че
