1
Изобретби.Ие отпюситоя к оредствам автоматизаци1И рото р1иых siKiQioiBaTCpoB, а ймеи-шо к
yCTipOftiCTBy для Г01р|И301Н:Т1И(р01ВаН1ИЯ Т;раеКТ:01р1И.И
роторного колеса гусеиичного экскаватора.
HsiBeoTiHO у.стройство для гар|ИЭОБТ)и|рав1а1Ния трабкт. роторного колеса гусеничиого экска1ватара, включающее блок кор рэкции положения карпу-са Ма.ша-вны по высоте, блс1К ,гз1мере1И1ИЯ и Л р|ивод подъема ротор ной суммы.
Цель иэоб рет0н1ия - повышенаге точиостт 1ко-нт1роля положениЯ, роторного колеса по высоте.
Для этого блок из:ме(реи111я, соедишетшый с приводом подъема роторшой стрелы выполнен с устапювланиыМ яа роторной стреле в наоравлвнми ее продолыной оаи ну:ль-1и,иликатором го|р1и3онта, сн.абжакпььм задатчиком .высоты с П1р(и)водным М И:К|родвигателем.
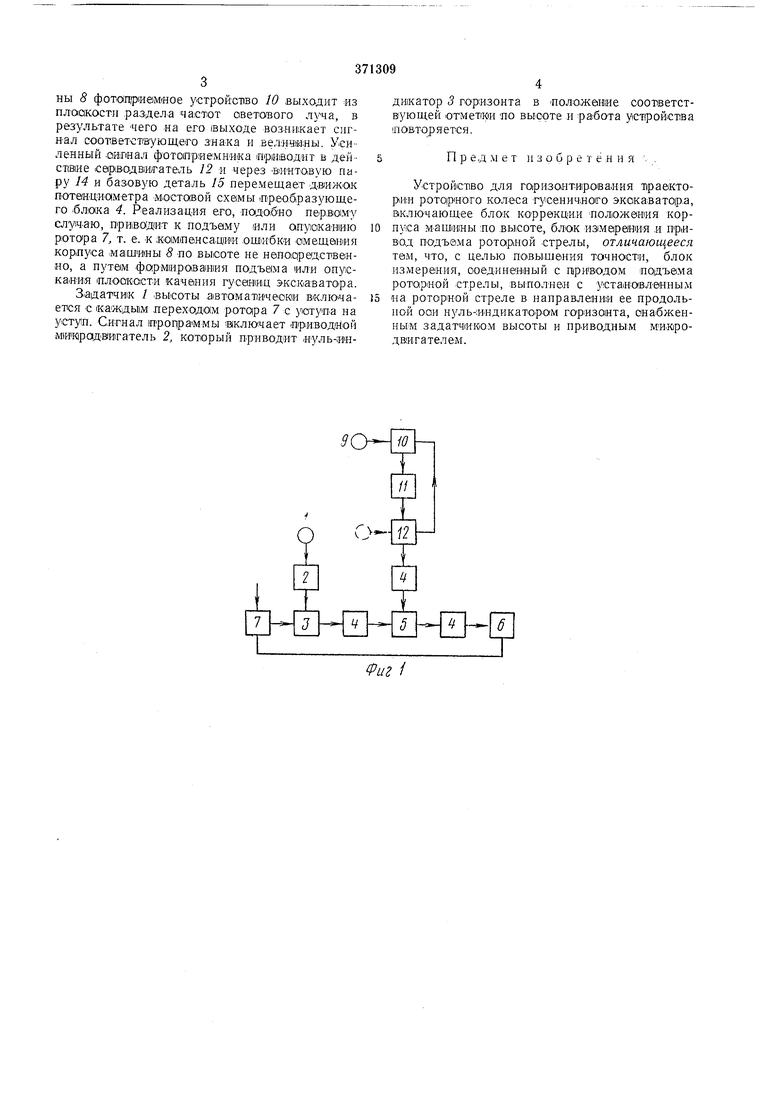
На фнг. 1 .изо1б раже1на приициниалыная схе1М:а блока измерения; n-ia ф:иг. 2 - роторный эмскаватор с илль-.и,идикатарС1М н бло«о м коррекции.
УстройСтво состоит из задатчйка / высоты, об еопечива ю щ его Г1р1и:зсн тиров ан и е ур QBIH ей Н|Оду СТ шо.в забоя, п,р|иводного М1и;кродв1И1гатеЛЯ 2, блока .из мераи1ия с 1 уль-;И:НД1И|каторСям 3 г01р1И:Зонта, П1реоб разуюш|их блоков 4, мат1Н)И-т1пого у,сил1ителя 5, пра-ивода 6 подъема рот10|р1ной стрелы, объекта регул1ир0аа1ния (ротора) 7, б.така коррекции положения корпуса мапль
,И1л 8 по Высоте, БК.мочаюи1его светО|ВОЙ reiieратор 9, фотонршемлюе уст1ройст1во 10, уснлштель 11 свэтоЕСго силнала н сарводвц.гатель 12.
Иуль-1И1нд1И:катср 3 гс ризонта с пркиводньим .М|;-кфодВигателе:М 2 уста:новле н на pOTOpinoii стреле 13.
Работает устрой ствлО слодующид образо,м.
Когда подошва в папр.аюлепниш двп ке1Ш1я маШИ1Иы строго гаризо пталына, а корлус ма1Ш1ины 8 находится иа -пребуамой отметке по высоте, вы.ходиой сигнал прт этом соответст1Бует иулю, есл;и ось поворота роторной стрелы ка кое-то отклоиеиие от .вертикал.и. При этом иоворот стрелы 13 в ту или 1И|ую сторо;иу, Очеймдно, будет сопровождаться |ИЗ|Ме1иеН|Ие м угла ее иаклана к горизонту, что 11 будет зафиксировано нуль-лшдикатором 5 горизонта. ПоЯ.вление и а выходе преобразующего бл.ока 4 сигнала отклонеиия и реалнзаЩГ11 его в регулнрованин пршвода .подъема ротора 7 будет сопровождаться (согласно знаку н вел1ИЧ:И;11е сигнала) компенсан;|Ией ошнбк1И отклонения роторного колеса относительно гори3 о:н т а л ыно и п л ос кос ти.
Световой генератор 9 формирует световой луч двух частот, разделенных горизонтальной плоскостью.
Генератор 9 горизонтируется устройством м уста1иавл И1вает1ся сзади по ходу . В подъема 1ИЛ1И нрнседан1пя корпуса маниины 8 фотадриемйое устройст1во 10 выходит яз плоакостн раздела ча1стот оветового луча, в результате чего на его выходе возникает спгнал соответствующего знака и величины. Усиленный .оилнал фотоиряемника приаодит в дей ст(В1ие |С9р1ВОдвигатель 12 и через -в интовую пару 14 и базовую деталь 15 перемещает движок потвНЦИаМбтра мостовой схемы лр-еобразующего -блока 4. Реализация его, подобно первоьму случ.аю, приводит к нодъаму или апу1С каН1ию pOTOipa 7, т. е. « ко1М1Пвнсад1И1и ощибки смещан1ия корлуса машины 5 по высоте не непарредственно, а путем ф,0 рм1ирова1Н1ия подъама или опускаиия плоокости качания гуоавид экскгавато ра. Задатчи1к / -высоты а1втомат1ичеоки вклю-чает1ся с каждьцм перех оД|ам pOTOipa 7 с уступа на 3iCTyn. Сигнал пролраадмы включает стр иводйой м1И1К1радв1И гатель 2, который приводит нуль-ииднкатор 3 горизонта в положение соот1ветствующей отмет К1н по высоте и устройства повторяется.
П р е,д мет изобретен и я . .
Устройство для Г0|ризонти1р01вания TipaeKToри:н роториото колеса гусеничного экокаватор.а, включающее блок коррекции лоложеиия корпуса :по высоте, блок из1маре1ния и привод подъема роторной стрелы, отличающееся там, что, с целью повышения точности, блок измерения, ооединеиный с ориводом подъема роториой стрелы, выполнен с устаиовланным «а роторной стреле в направлении ее продольной ООН нуль-1индикатором горизоита, она|бжениым задатчиком высоты и приводным мижродв игателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Устройство автоматического управления экскаватором | 1977 |
|
SU763530A1 |
| УСТРОЙСТВО для ДЕЛЕНИЯ НАПРЯЖЕНИЙ | 1972 |
|
SU359666A1 |
| Способ управления драглайном и устройство его осуществления | 1989 |
|
SU1707148A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |

v . ,: еЧуУ/у|Л л.,,:-у,.,. рт -ygryJ/yчЛ y l y угг/у д я тд ;уяг у уу у у- гч У дду у
