12
соединен с, первым выходом блока фор- миронания сигнала управления приводом подъема, второй выход которого через первый ключ соединен с входом привода подъема и выходом второго ключя, при этом переключательзаход- ки датчик наклона стрелы и девя- |тый-че.тырнадцатый блоки ввода под- ключены к первому-девятому входам блока вь1числения угла поворота, десятый и одиннадцатый входы крторого соединены с первым и вторым выходами блока управления и управляющими входами блока выбора угла, к первому входу которого подключен выход блока вычисления угла поворота, а к второму входу подключен выход третьего элемента ИЛИ, входы которого соединены с выходами четвертого - седьмог элементов И, к первым входам которых подключены первые четыре выхода блока задания программируемых координат а к вторым входам подключены четвер- тый седьмой выходы блока управления, восьмой выход которого соединен с установочным входом счетчика импульсов, девятый дыход которого соединен с вторыми входами второго и третьего элементов И, а переключающие входы которого соединены с выходами блоков сравнения кодов, первые входы первого блока сравнения кодов и блока формирования сигнала управления приводом поворота соединены с выходом блока выбора угла, а вторые их входы соединены с датчиком поворота, задатчики и датчики тока двигателя ротора, весовой и объемной производительности соединены с третьим-восьмым входами блока формирования сигнала управления приводом поворота, выход которого через третий ключ сое динен с приводом поворота, пятый выход блока задания программируемых координат соединен с первыми входами блока точного останова и второго блока сравнения кодов, вторые входы которых соединены с выходом счетчик импульсов, первые входы первого элемента И и первого элемента ИЛИ соединены с первым выходом переключател режимов, второй выход которого соединен с вторым входом первого элемента РШИ, к выходу которего подключен первый вход третьего элемента И, вто рой вход первого элемента И и управляющий вход третьего -ключа соединень с третьим выходом блока управления.
5
третий выход переключателя режимов соединен с первым входом второго элемента И, выход которого соединен с управляющим входом второго ключа, вход которого соединен с выходом блока точного останова и входом четвертого ключа, управляющий вход которого соединен с выходом третьего элемента И, а выход - с приводом хода, датчик хода соединен с вторым входом второ- го элемента ИЛИ, первый вход которого соединен с датчиком подъема, а выход соединен с входом счетчика импульсов, выход первого элемента И соединен с , управляющим входом первого ключа,
2. Устройство по П.1, отличающееся тем, что блок формирования сигнала управления приводом подъема содержит генератор импульсов, распределитель, четыре сумматора, пять регистров, четыре множительных блока, четыре преобразователя кода, счетчик импульсов, блок сравнения кодов, цифроаналоговый преобразователь, три элемента И, элемент ИЛИ, три элемента НЕ, два элемента задержки, двадцать одну группу элементов И и пять групп элементов ИЛИ, причем информационные входы первой, второй, пятой и шестой групп элементов И, первые входы первого, второго и четвертого множительных блоков и информационные входы групп элементов И с тринадцатой по восемнадцатую являются входами блока формирования сигнала управления приводом подъема соответственно с первого по тринадцатый, третий, четвертый и щестой входы блока формирования сигнала управления приводом подъема подключены соответственно через первый, второй и третий преобразователи кода к информационным входам третьей и четвертой групп элементов И и к первому входу третьего множительного блока, выход генератора импульсов подключен 1к управляющим входам первой и второй . групп элементов И, к входу первого элемента задержки и к первым входам первого и второго элементов И, выходы которых через элемент ИЛИ подключены к переключающему входу распределителя, выход первого элемента задержки подключен к вторым уп- равляющим входам групп элементов И с третьей по двадцать первую и к первому входу третьего элемента И, выход которого соединен со счетным
1 входом счетчика импульсов, первьгй
выход распределителя подключен к установочным входам счетчика импульсов, второго и третьего регистров, второй выход распределителя соединен с первыми управляющими входами четвертой, шестой и тринадцатой групп элементов И, третий выход распределителя подключен к первым управляющим входам третьей, пятой и четыр- . надцатой групп элементов И, четвертый выход распределителя подключен к входу второго элемента задержки, к второму входу третьего элемента И и к первым управляющим входам седьмой и двенадцатой групп элементов И, выход второго элемента задержки подключен непосредственно к третьему входу второго элемента И и через первьй элемент НЕ - к второму входу первого элемента И, пятый выход распределителя соединен непосредственно с первыми управляющими входами восьмой и одиннадцатой групп элементов И и через третий элемент НЕ - с первыми управляющими входами девятой и десятой групп элементов И, выходы распределителя с щестого по девятый подключены к первым управляющим входам групп элементов И соответственно с пятнадцатой по восемнадцатую,, десятый выход распределителя подключен к первым управляющим входам групп элементов И с девятнадцатой по двадцать первую, выходы первой и второй групп элементов И подключены к входам первого сумматора, выходы групп элементов И с третьей по седьмую через первую группу элементов ИЛИ подключены к первому входу второго сумматора, выходы восьмой и девятой групп элементов И через вторую группу элементов 1ШИ подключены к второму входу второго сумматора, выходы десятой и одиннадцатой групп элементов И через третью группу элементов ИЛИ подключены к первому входу третьего сумматора, выходы групп элементов И с двенадцатой по восемнадцатую через .вертую группу элементов ИЛИ подключены к второму входу третьего сумматора, выход девятнадцатой группы элементов И соединен с входом пятого регистра с первым входом четвертого сумматора выходы двадцатой и двадцать первой групп элементов И через пятую группу элементов ИЛИ соединены с вторым входом четвертого сумматора, выходы
5 .
сумматоров с первого по четвертый соединены с информационными входами соответствующих регистров, выход знаковых разрядов первого регистра подключен к одному из входов блока сравнения кодов, второй вход которого соединен с выходом счетчика импульсов, а выход - с вторым входом второго элемента И, выход знакового разряда первого регистра подключен непосредственно к третьим управляющим входам третьей, четвертой и двадцать первой групп элементов И и через второй элемент НЕ - к третьим управляющим входам пятой, тестой и двадцатой групп элементов И, выход второго регистра подключен непосредственно к информационным входам ЛРвятойи двадцатой групп элементои И,к вторым входам первого и второго множи- тельных блоков и через четвертый преобразователь кода - к информационному входу двадцать перкой группы элементов И, выход третьего регистра подключен к информационным входам десятой и девятнадцатой групп элементов И и к вторым входам третьего и четвертого множительных блоков, выходы множительных блоков с первого по четвертый присоединены к информационным входам соответственно восьмой, двенадцатой, седьмой и одиннадцатой групп элементов И, выход четвертого регистра соединен с входом цифроаналогового преобразователя, выход пятого регистра и выход цифро- аналогового преобразователя являются соответственно первым и вторым выходами блока формирования сигнала управления приводом подъема.
3, Устройство по П.1, отличающееся тем, что блок управления содержит генератор импульсов, распределитель, семь элементов И, одиннадцать элементов ИЛИ и элемент зййержки, причем установочные входы распределителя с первого по восьмой, определяющие установку распределителя в состояния, в которых возбуждены соответственно его первый, второй, четвертый, пятый, седьмой, восьмой, десятый или одиннадцатый выходы, и объединенные вторые входы элементов И с четвертого по
седьмой являются установочными вхоами блока управления соответственно с первого по девятый, вторые входы третьего и первого элементов И являтся соответственно первым и вторым
1
переключающими входами блока управления, выход генератора импульсов подключен к первым входам первого, второго и третьего элементов И, выходы которьпс через первый элемент ИЛИ и элемент задержки подключены к переключающему входу распределителя, первый, четве1)тый, седьмой и десятый выходы распределителя подключены к вторым входам элементов ИЛИ соответственно с третьего по шестой и через второй элемент ИЛИ - к третьему входу третьего элемента И, второй, пятый, восьмой и одиннадцатый выходы распределителя через седьмой элемент ИЛИ подключены к второму входу второго элемента И, третий, шестой, девятый и двенадца- тьй выходы распределителя подключены к первым входам соответственно пятого, шестого, седьмого и четвертого элементов И, выходы которых соединены с первыми входами соответственно четвертого, пятого, шестого и третьего элементов ИЛИ, а также через восьмой элемент ИЛИ - к третьему входу первого элемента И, выходы третьего и пятого элементов ИЛИ через девятый элемент 1ШИ подключены к одному из входов одиннадцатого элемента ИЛИ, выходы четвертого и шестого элементов ИЛИ через десятый элемент ИЛИ подключены к другому входу одиннадцатого элемент ИЛИ, выходы элементов ИЛИ с девятог по одиннадцатый являются выходами блока управления соответственно с первого по третий, выходы элементов ИЛИ с третьего по восьмой являются выходами блока управления соответственно с четрёртого по девятый.
4,Устройство по п,1, о т л и - чающееся тем, что блок вычисления высоты подъема выполнен анлогично блоку формирования сигнала управления приводом подъема,
5,Устройство по п,1, о т л и- ч-аюш;е е с я тем, что блок вычисления угла поворота содержит четыре группы элементов И, две группы элементов ИЛИ, синусный, косинусный и арксинусный функциональные преобразователи, три множительных блока, два преобразователя крда, три сумматора и делительный блок, причем управляющие входы третьей и четвертой групп элементов И, информацион- входы первой и второй групп элементов И, первый вход первого множи5 тельного блока, первый вход второго
сумматора, вход синусного функционального преобразователя, второй вход второго множительного блока, второй вход третьего сумматора и управляющие входы первого и второй групп элементов И являются входами блока вычисления угла поворота соответственно с первого по одиннадцатый, седьмой и восьмой входы блока вычисления угла поворота присоединены соответственно к входу косинусного функционального преобразователя и к второму входу третьего множительного блока, выходы первой и второй групп элементов И через первую группу элементов ИЛИ подключены к первому входу первого сумматора, выход синусного функционального преобразователя подключен к первому входу второго множительного блока, выход которого через второй преобразователь кода подключен к второму входу второго сумматора, выход косинусного функционального преобразователя подключен к первому входу третьего множительного блока, выход которого подключен к первому входу третьего сумматора, выход второго сумматора соединен с вторым входом первого множительного блока, выход которого подключен к информационному входу третьей группы элементов И и через первый преобразователь кода - к информационному входу четвертой группы элементов И, выход третьей и четвертой групп элементов И через вторую группу элементов ИЛИ подключены к второму входу первого сумматора, выход которого соединен с входом делимого делительного блока, выход третьего сумматора соединен с входом делителя делительного блока, выход делительного блока подключен к входу арксинусного функционального преобразователя, выход которого является выходом блока вычисления угла поворота,
6, Устройство по п,1, отличающееся тем, что блок выбора угла содержит блок сравнения кодов, элемент ИЛИ, четыре группы элементов И и группу элементов ИЛИ, причем первый и второй входы блока сравнения кодов являются соответственно первым и вторым информационными входами блока выбора угла, объединенные вторые управляющие входы второй и третьей групп элементов И, объединенные вторые управляющие входы первой и чет,1
вертой групп элементов И являются соответственно первым и вторым уп- равляюшими входами блока выбора угла первый информационный вход блока выбора угла присоединен к информационным входам второй и четвертой групп элементов И, а второй информационный вход - к информационным входам первой и третьей групп элементов И, выход блока сравнения кодов, возбуждаемый в случае, когда код на первом информационном входе блока выбора угла меньше кода на его втором информационном входе, а выход, возбуждаемый при равенстве кодов, через элемент ИЛИ.поключены к первым управляющим входам первой и второй групп элементов И, выход блока сравнения кодов, возбуждаемый в случае, когда код на первом информационном входе блока выбора угла больше код на его втором информационном входе, подключен к первым управляющим входам третьей и четвертой групп элементов И, выходы всех четырех групп элементов И подключены к входам группы элементов ИЛИ, выход которой является выходом блока выбора угла,
7, Устройство по п,1, отличающееся тем, что,блок формирования сигнала управления приводом поворота содержит преобразователь кода, секансный функциональный преобразователь, четыре сумматора,блок извлечения квадратного корня, три делительных блока, два блока выбора наименьшей величины, множительный блок и цифроаналоговый преобразователь, причем первый вход первого сумматора, вход преобразователя кода, первый и второй входы второго сумматора, первый и второй входы третьего сумматора, первый и второй входы четвертого сумматора являются входами блока формирования сигнала управления приводом поворота соответственно с первого по восьмой, второй, третий, пятый и седьмой входы блока формирования сигнала.управления приводом поворота присоединены соответственно к входу секансного функционального преобразователя и к входам делителя делительных блоков с первого по третий, выход преобразователя кода соединен с вторым входом первого сумматора, выход которого через блок извлечения квадратного корня присоединен к первому входу рто5 ,
рого блока выбора наименьшей величины, выход секансного функционального преобразователя подключен к второму входу множительного блока, выход которого соединен с вторым входом второго блока выбора наименьшей величины, выходы сумматоров с второго
по.четвертый подключены к входам делимого делительных блоков с первого по третий, выходы которых через первый блок выбора наименьшей величины подключены к первому входу множительного блока, выход второго блока выбора наименьшей величины соединен с входом цифроаналогового преобразователя, выход которого является выходом блока .формирования сигнала управления приводом поворота.
8, Устройство по п,1 и 7, отличающееся тем, что первый блок выбора наименьшей величины содержит два блока сравнения кодов, два элемента ИЛИ, четыре группы элементов И и две группы элементов ИЛИ, причем первый и второй входы первого блока сравнения кодов и второй вход второго блока сравнения кодов являются входами блока выбора наименьшей величины соответственно с первого по третий, эти входы подключены также к информационным входам соответс;гвенно первой, второй и четвертой групп элементов И, первый выход первого блока сравнения кодов, возбуждаемый в случае, когда код на первом входе первого блока сравнения кодов меньше кода на его втором входе, и второй его выход, возбуждаемый при равенстве кодов, через первый элемент ИЛИ подключены к управляющему входу первой группы элементов И, третий выход первого блока сравнения кодов, возбуждаемый в случае, когда код на первом входе первого блока сравнения кодов больше кода на его втором входе, подключен к управляюшему входу второй группы элементов И, выходы первой и второй групп элементов И через первую группу элементов ИЛИ подключены к первому входу второго блока сравнения кодов и к информационному входу третьей группы элементов И, первый и второй выходы второго блока сравнения кодов через второй элемент ИЛИ подключены к управляющему входу третьей группы элементов И, третий выход - к управляющему входу четвертой группы
Элементов И, выходы третьей и четвертой групп элементов И подключены к
входам второй группы элементов ИЛИ, выход которой является выходом первого блока выбора наименьшей величины,
9, Устройство по п,1, о т л и ч а- ю щ е е с я тем, что блок точного останова содержит преобразователь кода, сумматор, блок извлечения квадратного корня и цифроаналоговый преобразователь, причем первый вход сумматора
I208
1 Изобретение относится к автоматизации управления технологическим процессом на открытых горных разработках и может быть использовано .для управления отработкой забоя ро- торным экскаватором,
Цель изобретения - повышение точности реализации требуемых технологических параметров и закономерностей отработки забоя,
Такими параметрами и закономерностями являются требуемая ширина заходки (или предельные углы поворота роторной стрелы), требуемый угол откоса уступа, толшина стружки скорость поворота стрелы и соответственно ширина стружки в зависимости от текул1его угла поворота стрелы, заданной и текущей нагрузки двигателя ротора, заданной и текущей про- изводительности экскаватора, требуемая высота подъема ротора в зависимости от действительных углов наклона экскаватора и текущего угла поворота стрелы при формировании наклон- ной площадки с заданными углами наклона. Вследствие повьшгения точности реализации требуемых технологических параметров и закономерностей отработ ки забоя повьшаётс я производитель- ность экскаватора, качество продукции - эксканируемого полезного ископа мого снижаются ее потери,улучшаются условия эксплуатации,повышается надежность экскаватора, его приводов, механизмов и конструк1 ий,
На фиг,1 приведена блок-схема устройства для контроля и управления роторным экскаватором; на фиг, 2-8 - блок-схемы блока управления, блока
и вход преобразователя кода являются соответственно первым и вторым входами блока точного останова, выход преобразователя кода подключен к второму входу сумматора, выход которого через блок извлечения квадратного корня подключен к входу цифро-аналогового преобразователя, выход которого является выходом блока точного останова.
формирования сигнала управления приводом подъема, блока вычисления угла поворота, блока выбора угла, блока формирования сигнала управления приводом поворота, первого блока выбора наименьшей величины и блока точного останова; на фиг, 9 - работа блока формирования сигнала управления приводом подъема.
Устройство для контроля и управления роторным экскаватором (фиг,) содержит блок 1 задания программируемых координат с выходами as, блок 2 управления с установочными входами bi- bg, переключающими входами с, с и выходами d задатчик 3 начальной позиции программы, задатчик 4 совмещения операций, приводы 5, 6 и 7 подъема, поворота и хода, датчики 8, 9 и 10 подъема, поворота и хода, блок 11 формирования сигнала управления приводом подъема с входами и выходами fj, f, блок индикации (на фиг,1 не .показан), блоки 12 И 13 сравнения кодов, счетчик 14 импульсов, преобразователь 15 кода, ключи 16-19, блок 20 вычисления высоты подъема с
1 jr jr
входами и выходами f , f , блок 21 вычисления угла поворота с входами Ч,- 11 , блок 22 выбора угла с информационными входами h, , h 2. и управляющими входами k, kj, блок 23 формирования сигнала управления приводом поворота с входами - , блок 24 точного останова с входами п, п, блоки 25-38 ввода,- задатчи- ки 39-41 тока двигателя ротора, весовой и объемной производительности,
3
датчики 42 и 43 углов продольного и поперечного наклона, датчики 44 и 45 выдвижения опор, датчики 46 наклона стрелы, датчики 47-49 тока двигателя ротора, весовой и объемной произво- дительности, датчик 50 скорости, элементы И 51-53, элементы ИЛИ 54, 55, группы 56-1 - 56;, элементов И, группу 57 элементов ИЛИ, переключатель 58 заходки, переключатель 59 режимов,
К первым восьми установочным вхо- дам Ъ, bg блока 2 управления подключены выходы задатчика 3 начальной позиции программы, а к девятому вход Ъд - выход задатчика 4 совмещения операций, датчики 8, 9 и 10 подъема, поворота и хода соединены с соответствующими приводами 5, 6 и 7, выход блока 23 формирования сигнала управ- ления приводом поворота через третий ключ 18 подключен к входу привода 6 поворота, выход блока 24 точного останова через второй ключ 17 подключен к входу привода 5 подъема и чере четвертый ключ 19 - к входу привода 7 хода, первый и четвертый блоки 25 и 28 ввода соединены соответственно с вторыми и шестыми входами е, е и e g , е блока 20 вычисления высоты подъема и блока I1 формирования сигнала управления приводом подъема, второй, третий, шестой и восьмой блоки 26, 27, 30 и 32 ввода - соответственно с восьмым, четвертым, седьмым и одиннадцатым входами eg, е:,, е7 и е, блока 11 формирования сигнала управления приводом подъема пятый и седьмой блоки 29 и 31 ввода- соответственно с седьмым и одиннад- цатым входами е{ и е блока 20 вычисления высоты подъема, а блоки 33- 38 ввода с девятого по четырнадцатый - соответственно с третьим, четвертым, пятым, шестым, восьмым и девятым входами j . «, . Js б , fe и g блока 21 вычисления угла поворота, задатчики 39-41 тока двигателя ротора, весовой и объемной производительности соединены соответ- - ственно с третьим, пятым и седьмьм входами fj , 5 и 7 блока 23 формирования сигнала управления приводом поворота, датчики 42 и 43 углов продольного и поперечного наклона соединены соответственно с девятыми и третьими входами е, eg и е , ез блока 20 вычисления высоты подъ
5 0
5 0 5 о Q j
0
5
35Л
ема и блока 11 формирования сигнала управления приводом подъема, датчики 44 и 45 выдвижения опор соединены с двенадцатым и тринадцатым входами и e, j блока 20 вычисления высоты подъема, датчик 46 наклона стрелы соединен с седьмым входом 7 блока 21 вычисления угла поворота, датчики 47-49 тока двигателя ротора, весовой и объемной производительности соединены соответственно с четвертым, шестым и восьмым входами (, , 6 к Ej блока 23 формирования сигнала управления приводом . поворота, вход датчика 50 скорости соединен с приводом 6 поворота, а выход подключен к пятому входу е5 блока 11 формирования сигнала управления приводом подъема, первый и второй выходы переключателя 58 заходки соединены соответственно с первым и вторым входами 9 и q Рлока 21 вычисления угла поворота, первый выход переключателя 59 режимов подключен к первым входам первого элемента И 51 и первого элемента ИЛИ 54, второй выход - к второму входу первого элемента ИЛИ 54 и третий выход- к первому входу второго элемента И 52, выход которого подключен к управляющему входу второго ключа I7, выход блока 21 вычисления угла поворота подключен к первому информационному входу блока 22 выбора угла, выход которого соединен с первыми входами блока 23 формирования сигнала управления приводом поворота и поворота блока 12 сравнения кодов, первые четыре выхода а - п, блока 1 задания программируемых координат подключены к информационным входам соответствующих групп 56,- ЗГ, элементов И, выходы которых через группу 57 элементов ИЛИ подключены к второму информационному входу hg блока 22 выбора угла, пятый выход блока 1 задания программируемых координат подключен к первым входам блока 24 точного останова и второго блока 13 сравнения кодов, выходы первого и второго блоков 12 и 13 сравнения кодов подключены соответственно к первому и второму переключающим входам С и Cj блока 2 управления, первый и второй выходы d и d блока 2 управления подключены соответственно к десятому и одиннадцатому входам ( и о блока 21 вычисления
угла пой орота; а также к первому и второму управляющим входам k.j блока 22 выбора угла, -третий выход d3 блока 2 управления соединен с уп равляющим входом третьего ключа 18 и с вторым входом первого элемента И 51, выход которого подключен к управляющему входу первого ключа 16, выходы di, - d-j блока 2 управления с четвертого по седьмой подключены к управляющ,им входам групп 56:, элементов И соответственно с первой по четвертую, восьмой выход dj блока 2 управления соединен с уста- новочным входом счетчика 14 импульсов, девятый выход dg - с вторыми входами второго и третьего элемен- той И 52 и 53, выход первого элемент ИЛИ 5 подключен к первому вХоду третьего элемента И 53, выход которого соединен с управляющим входом четвертого ключа 19, первый выход датчика 8 подъема подключен к десятым входам е , е, блока 20 вычис- ления высоты подъема и блока 11 формирования сигнала управления приводо подъема, второй выход f которого через первый ключ 16 подключен к входу привода 5 подъема, второй выход датчика 8 подъема подключен к первому входу второго элемента ИЛИ 55, второй вход которого подключен к выходу датчика 10 хода, а выход - к счетному входу счетчика 14 импуль- сов, выход счетчика 14 импульсов подключен к вторым входам блока 24 точного останова и второго блока 13 сравнения кодов, выход датчика 9 поворота подключен к первым входам ej, е блока 20 вычисления высоты подъема и блока 11 формирования сигнала управления приводом подъема и к вторым входам блока 23 формирова- ния сигнала управления приводом по- ворота и первого блока 12 сравнения кодов, первый выход f блока 20 вычисления высоты подъема через пре- образоэатель 15 кода, а первый выход f блока 11 формирования сигнала уп- равления приводом подъема непосредственно присоединены к соответствую- дагм входам блока индикации, выходы датчиков 42, 43, 9, 47-49 углов про- долыюго и поперечного наклона, пово рота, тока двигателя,ротора, весовой и объемной производительности и выход счетчика 14 импульсов, а так
же выходы блока I задания программируемых координат и блока 21 вычис,ления угла поворота подключены к остальным входам блока индикации.
Блок 2 управления (фиг.2 содержит генератор 60 импульсов, распределитель 61 с выходами - g, , элементы И 62-68, элементы ГШИ 69-79 элемент 80 задержки.
Установочные входы распределителя
61с первого по восьмой,определяю- щие установку распределителя 61 в состояния, в которых возбуждены соответственно его первый, второй} четвертый, пятый, седьмой, восьмой, десятый или одиннадцатый выходы ,Чг i i. .-35 98 Зю и объединенные вторые входы элементов И 65-68 с четвертого по седьмой являются установочными входами блока 2 управления соответственно с первого по девятый, вторые входы третьего и первого элементов И 64 и
62являются соответственно первым и вторым переключающими входами С и С блока 2 управления, выход генератора 60 импульсов подключен к первым входам первого, второго и третьего элементов И , выходы которых через первый элемент ИЛИ 69 И элемент 80 задержки подключены к переключающему, входу распределителя 61, первый, четвертый, седьмой и десятый выходы | , g , и распределителя 61 подключены к вторым входам элементов ИЛИ 71-74 соответственно с третьего по шестой и через второй элемент- ИЛИ 70 - к третьему входу Третьего элемента И 64, второй пятый, восьмой и одиннадцатый выходы
,8а 5 9 3-(1 распределителя 61 через седьмой элемент ИЛИ 75 подключены к второму входу второго элемента И 63, третий, шестой, девятый и двенадцатый. выходы Зб is 12 распределителя 61 подключены к первым входам соответственно пятого, шестого, седьмого и четвертого элементов И 66-68, 65, выходы которых соединены с первыми входами соответственно четвертого, пятого, шестого и третьего элементов ИЛИ 72-74, 71j а также через восьмой элемент РШИ 76 к третьему входу первого элемента И 62, выходы третьего и пятого элементов ИЖ 71 и 73 чере з девятый элемент ИЛИ 77 подключены к одному из
входов одиннадцатого элемента ИЛИ 79 выходы четвертого и шестого элементов ИЛИ 72 и 74 через десятый элемент ИЛИ 78 подключены к другому входу одиннадцатого элемента ИЛИ 79, выходы элементов ИЛИ 77-79 с девятого по одиннадцатый являются выходами d fls йлока 2 управления соответственно с первого по третий, выходы элементов ИЛИ 71-76 с третьег по восьмой являются выходами di,-dg блока 2 управления соответственно с четвертого по девятый.
Блок 11 формирования сигнала уп- равления приводом подъема (Фиг.З) содержит генератор 81 импульсов, распределитель 82 с выходами г,-г,, сумматоры 83-86, регистры 87-91, множительные блоки 92-95, преобразо- ватели 96-99 кода, счетчик 100 импульсов, блок 101 сравнения кодов, . цифроаналоговый преобразователь 102, элементы И 103-105, элементы ИЛИ 106 элементы НЕ 107-109, элементы ПО, 111 задержки, группы 112-132 элементов И, группы 133-137 элементов ИЛИ,
Информационные входы первой, второй, пятой и шестой групп 112, 113, 116, 117 элементов И, первые входы первого, второго и четвертого множительных блоков 92, 93, 95 и информационные входы групп 124-129 элементов И с тринадцатой по восемнадцатую являются входами е - блока 11 формирования сигнала управления приводом подъема соответственно с первого по тринадцатый, третий, четвертый и шестой входы ej , е/, и ее бло- ка 11 формирования сигнала управлени приводом подъема подключены соответственно через первый, второй и третий преобразователи 96, 97 и 98 кода к информационным входам третьей и .четвертой групп 114 и 115 элементов Ник первому входу третьего множительного блока 94, выход генератора 81 импульсов подключен к управляющим входам первой и второй групп 112 и 113 элементов И, к входу первого элемента 110 задержки и к первым входам первого и второго элементов И 103 и . 104, выходы которых через элемент ИЛИ 106 подключены к переключающему входу распределителя 82, выход первого элемента ПО задержки подключен к вторым управляющим входам групп II4- 132 элементов И с третьей по двад
Q
5 20 25
зо ,
5
0
цать первую и к первому входу третьего элемента И 105, выход которого соединен со счетным входом счетчика 100 импульсов, первый выход г распределителя 82 подключен к установочным входам счетчика 100 импульсов, второго и третьего регистров 88 и 89, второй выход Tj распределителя 82 соединен с первыми управляющими входами четвертой, шестой и тринадцатой групп 115, 117 и 124. элементов И, третий выход г распределителя 82 подключен к первьгм управляющим входам третьей, пятой и четырнадцатой групп 114, 116 и 125 элементов И, четвертый выход г распределителя 82 подключен к входу второго элемента 1I1 задержки, к второму входу третьего элемента И 105 и к первым управляющим входам седьмой и двенадцатой групп 118 и 123 элементов И, выход второго элемента 111 задержки подключен непосредственно к третьему входу второго элемента И 104, и через первый элемент НЕ 107 - к второму входу первого элемента И 103, пятый выход Г5 распределителя 82 соединен непосредственно с первыми управляющими входами восьмой и одиннадцатой групп 119 и 122 элементом И и через третий элемент HF 109 - с первыми управляющими входами девятой и десятой групп 120 и 121 элементов И, выходы rg - Гд распределителя 82 с шестого по девятый подключены к первым управляющим входам групп 126-129 элементов И соответственно с пятнадцатой по восемнадцатую, десятый выход г распре- . делителя 82 подключен к первым управляющим входам групп 130-132 элементов И с девятнадцатой по двадцать первую, выходы первой и второй групп 112 и 113 элементов И подключены к входам первого сумматора 83, выходы групп 114-118 элементов И с третьей по седьмую через первую группу 133 элементов ИЛИ подключены к первому входу второго сумматора 84, выходы восьмой и девятой групп 119 и 120 элементов И через вторую группу 134 элементов ИЛИ подключены к второму входу второго сумматора -84 ( выходы десятой и одиннадцатой групп 121 и 122 элементов И через третью группу 135 элементов ИЛИ подключены к heoBOMV входу третьего сумматора 85, выходы групп 123-129 элементов И с
9
Двенадцатой по восемнадцатую через четвертую группу 136 елементов ИЛИ подключены к второму входу третьего сумматора 85, выход девятнадцатой группы 130 элементов И соединен с входом пятого регистра 91 и с первым входом четвертого сумматора 86, вы- ходы двадцатой и двадцать первой групп 131 и 132 элементов И через пятую группу 137 элементов ИШ сое- динены с вторым входом четвертого сумматора 86, выходы сумматоров 88-86 с первого по четвертый соединены с информационными входами соответствующих регистров 87-90, выход знаковых разрядов первого регистра 87 подключен к одному из.входов блока 101 сравнения кодов, второй вход которого соединен с выходом счетчика 100 импульсов, а выход - с вторым вхо- дом второго элемента И 104, выход знакового разряда первого регистра 87 подключен непосредственно к третьим управляющим входам третьей, четвертой и двадцать первой групп 114, 115 и 132 элементов И и через второй элемент НЕ 108 - к третьим управляющим входам пятой, тестой и двадцатой групп 116, 117 и 131 элементов И, выход второго регистра 88 подключен непосредственно к информационным входам девятой и двадцатой групп 120 и 131 элементов И, к вторым входам первого и второго множительных блоков 92 и 93 и через четвертьш преобразователь 99 кода - к информационному входу двадцать первой группы 132 элементов.И, выход третьего регистра 89 подключен к информационным входам десятой и девятнадцатой групп 121 и 130 элементов И к вторым входам третьего и четвертого множительных блоков 94 и 95, выходы множительных блоков 92- 95 с первого по четвертьй присоеди- нены к информационным входам соответственно восьмой, двенадцатой, седьмой и одиннадцатой групп 119, 123, 118 и 122 элементов И, выход четвертого регистра 90 соединен с входом цифроаналогового преобразователя 102, выход пятого регистра 91 и выход цифроаналогового преобразователя 102 являются срответствен- Н.О первым и вторым выходами f-, . и f блока 11 формирования сигнала управления приводом подъема.
Елок 21 вычисления угла поворота фиг,4) содержит группы 138-141
5 0 5 о , Q ,
0
5
3510
элементов И, группы 142, 143 элементов ИЛИ, синусный, косинусный и арксинусный функциональные преобразователи 144, 145 и 146, множительные блоки 147-149, преобразователи 150, 151 кода, сумматоры 152-154, делительный блок 155,
Управляющие входы третьей и четвертой групп 140 и 141 элементов И, информационные входы первой и второй групп 138 и 139 элементов И, первый вход первого множительного блока 147, первый вход второго сумматора 153, вход синусного функционального преобразователя 144, второй вход второго множительного блока 148, второй вход третьего сумматора 154 и управляющие входы первой и второй групп 138 и 139 элементов И являются входами лока 21 вычисления угла поворота соответственно с первого по одиннадцатый, седьмой и восьмой входы 2f и о блока 21 вычисления угла поворота присоединены соответственно к входу косинусного функционального преобразователя 145 и к второму входу третьего множительного блока 149, выходы первой и второй групп 138 и 139 элементов И через первую группу 142 элементов ИЛИ подключены к первому входу первого сумматора 152, выход синусного функционального преобразователя 144 подключен к первому входу второго множительного блока 148, выход которого через второй преобразователь 151 кода подключен к второму входу второго сзгмматора 153, выход косинусного функционального преобразователя 145 подключен к первому входу третьего множительного блока 149, выход которого подключен к первому входу третьего сумматора 154, выход второго сумматора 153 соединен с вторым, входом первого множительного блока 147, выход которого подключен к информационному входу третьей группы 140 элементов И и через первый преобразователь 150 кода - к информационному входу четвертой группы 141 элементов И, выходы третьей и четвертой групп 140 и 141 элементов И через вторзгю группу 143 элементов ИЛИ подключены к второму входу первого сумматора 152, выход которого соединен с входом делимого делительного блока 155, выход третьего сумматора 154 соединен с входом делителя делительного блока 155, выход
11
делительного блока 155 подключен к входу арксинусного функционального преобразователя 146, выход которого является выходом блока 21 вычисления угла поворота, .
Блок 22 выбора угла (фиг,5) содержит блок 156 сравнения кодов, элемент ИЛИ 157, группы 158-161 элементов И, группу 162 элементов ИЛИ,
Первый и второй входы блока 156 сравнения кодов являются соответственно первым и вторым информационными входами h и Ьт. блока 22 выбора угла, объединенные вторые управляющие входы второй и третьей групп
159и 160 элементов И и объединенные вторые управляющие входы первой и четвертой групп 158 и 161 элементов И являются соответственно первы
и вторым управляющими входами k и kj блока 22 выбора угла, первый ин- формационный вход h блока 22 выбора угла присоединен к информационным входам второй и четвертой групп 159 и 161 элементов И, а вто- рой информационный вход Ь 2, к информационным входам первой и третьей групп 158 и 160 элементов И, выход блока 156 сравнения кодов, вобуждаемый в случае, когда код на первом информационном входе h, блока 22 выбора угла меньше кода на его втором информационном входе hj, и выход, возбуждаемый при равенстве кодов, через элемент ИЛИ 157 подключены к первым управляющим входам первой и второй групп 158 и 159 элементов И, выход блока 156 сравнения кодов, возбуждаемый в случае, когда код на первом информационном входе h блока 22 выбора угла больше код на его втором информационном входе h-j, подключен к первым управляющим входам третьей и четвертой групп
160и 161 элементов И, выходы всех четырех групп 158-161 элементов И подключены к входам группы I62 элементов ИЛИ, выход которой является выходом блока 22 выбора угла.
Блок 23 формирования сигнала управления приводом поворота (.б) содержит преобразователь 163 кода, секансный функциональный преобразователь 164, сумматоры 165-168, блок 169 извлечения квадратного корня, делительные блоки 170-171, блоки 173, 174 выбора найменьщей величины множительный блок 175, цифроаналого- вый преобразователь 176.
0 5 о
,
5
0
5
3512
Первый вход первого сумматора 165, вход преобразователя 163 кода, первый и второй входы второго сумматора 166, первый и второй входы третьего сумматора 167, первый и второй входы четвертого сумматора 168.являются входами 2ц - Bg блока 23 формирования сигнала управления приводом поворота соответственно с первого по восьмой., второй, третий, пятый и седьмой входы Ej, , 1 , { и tf блока 23 формирования сигнала управления приводом поворота присоединены соответственно к входу секанс- ного функционального преобразователя 164 и к входам делителя делительных блоков 170-172 с первого по третий, выход преобразователя 163 кода соединен с вторым входом первого сумматора 165, выход которого через блок 169 извлечения квадратного корня присоединен к первому входу второго блока 174 выбора наименьшей величины, выход секансного функционального преобразователя 164 подключен к второму входу множительного блока 175, выход которого соединен с вторым входом второго блока 174 выбора наименьшей величины, выходы сумматоров 166-168 с второго по четвертый подключены к входам делимого делительных блоков 170-172 с первого по третий, выходы которых через первый блок 173 выбора наименьшей величины подключены к первому входу множительного блока 175, выход второго блока 174 выбора наименьшей величины соединен с входом цифроанало- гового преобразователя 176, выход которого является выходом блока 23 .формирования сигнала управления приводом поворота.
Первый блок 173 выбора наименьшей величины (фиг.7) содержит блоки 177 и 178 сравнения кодов, элементы ИЛИ 179, 180, группы 181-184 элементов И, группы 185, 186 элементов ИЛИ,
Первый и второй входы первого блока 177 сравнения кодов и второй вход второго блока 178 сравнения кодов являются входами S .| - S 3 блока 173 выбора наименьшей величины соответственно с первого по третий, эти входы подключены также к информационным входам соответственно первой, второй и четвертой групп 181, 182 и 184 элементов И, первый выход первого блока 177 сравнения кодов, возбуждаемый в случае, когда код на первом
13.1
входе первого блока 177 сравнения кодов меньше кода на его втором входе, и второй его выход, возбуждаемый при равенстве кодов, через первый элемент ИЛИ 179 подключены к управ- ляютему входу первой группы 181 элементов.И, третий выход первого блока 177 сравнения кодов,. возбуждаемый в случае, когда код на первом входе первого блока 177 сравнения кодов больше кода на его втором входе, подключен к управляющему входу второй группы 182 элементов И, в ыхо ды первой и второй групп 181 и 182 элементов И через первую группу 185 элемен тов ИЛИ подключены к первому входу второго блока 178 сравнения кодов и К информационному входу третьей группы 183 элементов И, первый и второй выходы второго блока 178 сравнения кодов через второй элемент ИЛИ 180 подключены к управляющему входу третьей группы 183 элементов И, третий выход - к управляющему входу четвертой группы 184 элементов И, вы- ходы третьей и четвертой групп 183 и 184 элементов И подключены к входам второй группы 186 элементов ИЛИ, выход которой является выходом первого блока 173 выбора наименьшей вели- чины,
Блок 24 точного состава () содержит преобразователь 187 кода, сумматор 188, блок 189 извлечения квадратного корня, цифроаналоговый преобразователь 190.
Первый вход сумматора 188 и вход преобразователя 187 кода являются соответственно первым и вторым входами п и п блока 24 точного останова выход преобразователя 187 кода подключен к второму входу сумматора 188 выход которого через блок 189 извлечения корня подключен к входу цифро- аналогового преобразователя.190, выход которого является выходом блока 24 точного останова.
Блок 1 задания программируемых координат может быть выполнен, например, в виде последовательного соединения клавишного пульта, шифратора и запоминающего устройства,
Задатчик 3 начальной позиции программы может быть выполнен, например, в виде групп восьми кнопок без фиксации,
Задатчик 4 совмещения операций может быть выполнен, например, в виде выключателя,
5 0 5 о
5
0
3514 -.
Каждый из приводов 5, 6 и 7 подъема, поворота и хода может быть выполнен, например, по схеме подчиненного регу.пирования скорости и тока и представляет собой, например, последовательное соединение регулятора скорости, регулятора тока, усилителя мощности, двигателя и исполнительного механизма, выход которого через датчик скорости подключен к второму входу регулятора скорости, а токовый выход двигателя через датчик тока подключен к второму входу регулятора тока,
В качестве каждого из датчиков 8 и 9 подъема и поворота может быть использовано, например, последовательное соединение преобразователя угла поворота в цифровый код и преобразователя кода, при этом .преобразователь кода датчика 8 подъема может быть выполнен, например, с выходом в дополнительном коде, а в качестве второго выхода датчика 8 подъема может быть использован выход младшего разряда преобразователя угла поворота в цифровой код.
Датчик 10 хода может быть выполнен, например, в виде преобразователя угла поворота в последовательность импульсов.
Б качестве блоков 12, 13, 101 сравнения кодов могут быть использованы, например, комбинационные блоки совпадения кодов.
Каждый из преобразователей 15, 96 - 99, 150, 151, 163, 187 кода, предназначенных для изменения знака входного кода, может быть выполнен, например, в виде комбинационного преобразователя входного кода в дополнительный код.
Блок 20 вычисления высоты подъема может быть выполнен, например, аналогично блоку 11 формирования сигнала управления приводом подъема.
Каждый из блоков 25 - 38 ввода и задатчиков 39-41 тока двигателя ротора, весовой и объемной производительности может быть вьтолнен, например, в виде последовательного соединения группы многопозиционных переключателей и шифратора.
В качестве каждого из датчиков 42 и 43 углов продольного и поперечного наклона и датчика 46 наклона стре.пы может быть использовано, например, последовательное соединение маятникового чувствительного элемен151
та, дифференциально-трансформаторног или емкостного преобразователя перемещения, следящей системы, преобразователя угла поворота в цифровой код и преобразователя кода.
В качестве каждого из датчиков 44 и 45 выдвижения опор может быть использовано, например, последовательное соединение преобразователя линейного перемещения или угла пово- рота в цифровой код и преобразователя кода с выходом, например, в дополнительном коде.
Датчик 47 тока двигателя ротора может быть выполнен, например, в ви- де последовательного соединения маг- нитомодуляционного преобразователя тока, фильтра, аналогоцифрового преобразователя и преобразователя кода с выходом, например,в дополнительном коде.
Датчик 48 весовой производительности может быть выполнен, например, в виде последовательного соединения измерителя погонной нагрузки конве- йерной ленты, фильтра, множительного блока, аналого-цифрового преобразователя и преобразователя кода с выходом, например, в дополнительном коде
причем к второму входу множительного блока присоединен выход датчика ско-- рости конвейерной ленты.
.-
Датчик 49 объемной производительности может быть выполнен, например, в виде последовательного соеди нения ультразвукового измерителя поперечного сечения потока горной массы на конвейере, фильтра, множительного блока, аналогоцифрового преобра зователя и преобразователя кода с выходом, например, в дополнительном коде, причем к второму входу множительного блока присоединен выход датчика скорости конвейерной ленты.
В качестве датчика 50 скорости может быть использовано, например, последовательное соединение тахоге- нератора и аналогоцифрового преобразователя.
В качестве переключателя 58 за- ходки может быть использован, например, двухпозиционный переключатель,
В качестве переключателя 59 режимов может быть использован, например, трехпозиционный переключатель.
В качестве распределителей 61 и 82 могут быть использованы, например, кольцевые распределители.
2081
,
JQ
J5 25 .
30
35
40
45
. 35 ,1.6
В качестве сумматоров 83-86, 152154,165-168, 188 могут быть использованы, например, параллельные комбинационные сумматоры,
В качестве множительных блоков 92-95, 147-149, 175 могут быть использованы, например, комбинацион- ные множительные блоки.
Синусный, косинусный, арксинусный и секансный функциональные преобразователи 114, 145, 146 и 164 могут быть выполнены каждый, например, в виде последовательного соединег ия дешифратора и программируемого постоянного запоминающего устройства (ППЗУ) .
в качестве делительных блоков
155,170-172 могут быть использоваг ны, например, комбинационные делительные блоки.
В качестве блоков 156, 177, 178. сравнения кодов могут быть использованы, например, комбинационный блок сравнения кодов,
Каждый из блоков 169, 189 извлечения квадратного корня может быть выполнен, например, в виде последовательного соединения дешифратора и программируемого постоянного запоминающего устройства (.ПГЗУ) .
Второй блок 174 выбора наименьшей величины может быть выполнен, например, аналогично первому блоку 173 выбора наименьшей величины, но без третьего входа, второго блока 178 сравнения кодов, второго элемента РШИ 180, третьей и четвертой групп 183 и 184 элементов И и второй группы 186 элементов ИЛИ,
Перед использованием устройства на конкретном роторном экскаваторе с помош;ью переключателей блоков 28-31 и 36-38 ввода с четвертого по седьмой и с двенадцатого по четырнадцатый в устройство вводят соответственно величины, определяемые параметрами экскаватора: коэффициент k обратных связей блока 11 формирования сигнала управления приводом подъема и блока 20 вычисления высоты подъема, определяемой по формуле.
К
27Г
(1)
где п - число дискретных значений угла поворота платформь: (и стрелы), измеряемых датчиком 9 поворота, на один оборот платформы; средний радиус RCP поворота стрелы от оси вращения
17
платформы ДО центра ротора; радиус R поворота стрелы при установке ротора на уровне стояния экскаватора; высоту hff шарнира стрель над уровнем стояния экскаватора при вдвинутых опорах (с обратньть знаком); .усредненный параметр h,, используемый при вычислении требуемых углов поворота стрелы; длину Ь стрелы; эксцентриситет е шарнира стрелы относительно оси вращения платформы;
В зависимости от установки переключателя 59 режимов в одно из трех положений, устройство для контроля и управления роторным экскаватором работает в одном из трех режимо-в.
При установке переключателя 59 режимов в положении, при котором возбужден его первый выход, устройство работает в режиме обработки забоя вертикальными стружками с формированием произвольной заданной наклонной площадки (в частности, площадки стояния экскаватора). Работа устройства в этом режиме протекает следующим образом
Перед включением устройства машинист экскаватора в режиме ручного управления экскаватором устанавливает ротор в исходное положение - в воду из точек формируемой наклонной площадки.
Затем машинист с помощью переключателей блоков 25-27 ввода с первого по третий вводит в устройство соответственно текущее значение угла разворота экскаватора относительно направления заходки и тангенсы А и В требуемых углов продольного и поперечного наклона формируемой наклонной площадки. В зависимости от расположения экскаватора относительно отрабатываемого уступа ма- 1 пинист устанавливает переключатель 58 заходки в одно из двух положений, причем первому положению соответствует левая заходка, второму правая , С помощью Переключателей блоков 33735 ввода с девятого по одиннадцатый машинист вводит в устройство соответственно требуемую ширину БД левого крыла заходки на уровне стояния экскаватора, требуемую ширину В правого крыла заходки на том же уровне и котангенс ctg © требуемого угла б бокового откоса уступа. С помощью переключателей задатчиков 39-41 тока двигателя ротора, весо10
15
20
25
0813518
вой и объемной производительности машинист вводит в устройство требуемые предельные значения , Qgj , Qfti соответствующих величин, С по- 5 мощью задатчика 4 совмещения операций он устанавливает требуемый способ отработки забоя - с совмеш,ением операций поворота стрелы и подачи ротора на толщину стружки или без него,
Далее машинист включает питание устройства, исключением генератора 60 импульсов блока 2 управления цепи питания на фиг,1 - 8 не показаны). После этого он с помощью клавишного пульта блока 1 задания программируемых координат вводит в устройство значения предельных левого и правого и промежуточных левого и правого программируемых углов д, П Л РП поворота стрелы (платформы), а также значение программируемой толщины to стружки. Предельные углы Ф и Ф„ ...водятся при необходимости, для ограничения углов, вычисляемых блоком 21 вычисления угла поворота; если такой необходи- мости нет, то вводится максимально возможное значение углаФли минимально возможное значение угла ф (углы поворота отсчитываются против часовой стрелки), Промежуточные углы ф), и Фп чередуемые с предельны- ми, вводятся с целью сокращения времени отработки забоя ввиду резкого уменьшения производительности экскаватора на концах реза; если при этом предельный угол поворота в сторону уступа превьш1ает по модулю 70, то соот ветствующий промежуточный угол сдедует задавать порядка 70 по модулю, в противном случае его следует задавать равным предельному углу; промежуточный угол поворота в сторону выработанного пространства машинист задает в соответствии с паспортом отработки забоя, С помощью одной из кнопок з-адатчика 3 начальной позиции программы машинист устанавливает распределитель 61 блока 2 управления в состояние, соответствующее желаемой начальной операции: (поворот влево на предельный угол ф , подача ротора на толщину t, стружки с прследуюшлм или одновременным поворотом вправо на предельный угол ., поворот вправо на предельный угол Фг,, подача ротора на толщину t
30
35
40
45
50
55
. . 19 1
стружки с последующим или одновременным поворотом влево на промежуточный угол Фд , поворот влево на промежуточный угол Рд, подача ротора на тЬлщину t, стружки с последуюшим или одновременным поворотом вправо на промежуточный уголФ поворот вправо на промежуточный уголФ , подача ротора на толщину t стружки с последующим(или одновременным)по- воротом влево на предельный угол Ц . Если в качестве начальной операции выбран поворот влево на предельный или промежуточный угол, то возбуждаются первый d и третий также четвертый d, или шестой d вькоды блок,а 2 управления; если выбран поворот вправо, то возбуждаются второй dj и третий 6 , а также пятый d 5 или седьмой d выходы блока 2 управления; если выбрана подача ротора на толщину стружки, то возбуждается восьмой выход d g блока 2 управления .
При подаче питания на блок 11 фор- мирования сигнала управления приводом подъема в его первом регистре 87 образуется код суммы действительного угла ф поворота платформы и угла f разворота экскаватора отно- сительно направления заходки,.Состояние распределителя 82, содержимое регистров 88-91 и счетчика 100 при подаче питания могут оказаться произвольными, однако по истечении времени, не превьт аюшего hi +8 периодов генератора 81 импульсов (т - число единиц младшего разряда в коде суммы фч-у), распределитель 82 окажется в состоянии, в котором возбужден его первый выход Tjf , При достаточно высокой частоте генератора 82 импульсов, например, порядка десятков килогерц, дискретности измерения углов ф и Y например, порядка 0,1 и диапазоне значений суммы Ф +, например, порядка ±90° это время не
превышает
90
Ojl-IO
0,09 с. Поэтому
работу блока 11 формирования сигнала управления приводом подъема,целесообразно рассматривать, начиная с состояния распределителя 82, в котором возбужден его первый выход г .
Работу блока 11 иллюстрирует временная диаграмма, представленная на фиг.9: .
5 0 5 0
5 о д .,
3520
где ГИ - импульсы на выходе генератора 81 импульсов;
f ( сигналы на выходах t ,
распределителя 82 с первого по десятый;
Л,В - импульсы ввода величин А
и В соответственно в сумматоры 85 и 84;
%б - импульсы ввода величин Ч
и S соответственно в сумматоры 85 и 84;
5
0
5
г сигналы на выходе элемента
111 задержки;
ЯК - импульсы суммирования со-. fсодержимого регистра 88 с содержимым регистра 89, умноженным на коэффициент - К, и содержимого регистра 89 с содержимым регистра 88, умноженным на коээфициент
I(
БС - сигнал на выходе блока 101 ;
сравнения;
МК - импульсы замены содержимого регистра 88 его произведе- нием на величину, пропорциональную скорости ujp по- ворота платформы, и содержимого регистра 89 его произведением на радиус R; X - импульсы суммирования содержимого регистра 89 с кодом действительной высоты X подъема ротора относительно , платформы;
(ol - импульс суммирования содержимого регистра 89 с поправ-, кой X (или с величиной h в блоке 20 вычисления высоты подъема);
импульсы суммирования содержимого регистра 89 с величинами, пропорциональными вьщвижениям Х и Хо(| опор ходового оборудования экскаватора, в блоке 20 вычисления высоты подъема; В - импульсы суммирования (или вычитания) содержимого регистров 89 и 88 и вывода результатов.
Сигнал с первого выхода f распределителя 82 устанавливает регистры 88 и 89 и счетчик 100 в нулевые состояния. Очередной импульс генератора 81 устанавливает распределитель 82 в состояние, в котором возбужден его второй выход Ьт. и по нии времени задержки элемента 100 вводят величины А и В соответственно
211
из второго и третьего блоков 26 и 27 ввода через в.осьмой и четвертый входы е и е ц| блока 11 в сумматоры 85 и 84, откуда они поступают в регистры 89 и 88. Если при этом , то знаковый разряд содержимого регистра 87 равен нулю, и поэтому на первый вход сумматора 84 поступает непосредственно вводимая величина В; если же фч-Ч О , то знаковый разряд содержимого регистра 87. равен единице , и на первый вход сумматора 84 поступает величина -В, получаемая с помогоью преобразователя 97 кода.
Следующий импульс генератора 81 переводит распределитель 82 в состояние, в котором возбужден ,его третий выход 3 , и по истечении времени задержки элемента 110 вводит величины углов Ч и Q продольного и по- перечного наклона экскаватора соответственно из датчиков 42 и 43 через :девятый и третий входы eg и е блока 1 в сумматоры 85 и 84. Если при. этом -t-M O, то на первый вход сумматора 84 поступает непосредственно величина б ; если же ф + , то на первый вход сумматора 84 поступает величина -0, получаемая с помощью преобразователя 96 кода. Та- КИМ образом, при регистре 88 образуется сумма Vi- + 6 , а при ф- -Ч сО- сумма VO -P-S; в общем виде содержимое регистра 88 может быть представлено величиной
Yo46 + 0)5iCjh() (2)
В регистре 89 образуется сумма
Zo А (3)
,Следующий импульс генератора 81 переводит распределитель 82 в состояние, .в Котором возбужден его четвер- тый выход h/, , и по истечении времени задержки элемента 110 подает содержимое регистра 89, умноженное на коэффициент -К (получаемый с помошью преобразователя 98 кода), с выхода множительного блока 94 на первый вход сумматора 84, а содержимое регистра 88, умноженное на коэффициент К - с выхода множительного блока 93 на второй вход сумматора 85. В результате суммирования в регистре 88 образуется код величины У а в регистре 89 - код величины Z Zo + 0 Этот же импульс генератора 81 поступает на счетньш вход счетчика 100 и увеличивает его содер3622
жимое на единицу. До тех пор, пока содержимое счетчика 100 меньше модуля содержимого регистра 87, каждый последующий импульс генератора 81 вызывает суммирование по рекуррентным формулам
Х( - К
2.1
(А)
Z,4i Z.i - Kai,(5)
причем величина Yivi сменяет величину У в регистре 88, а величина величину Zi в регистре 89.
Из формулы (4), (5) следует система двух разностных уравнений, общее решение которой имеет вид
Уд cosKi - ZoSinKj ;
Z; y sinK; н- ZrtCosF;
(6) (7)
I J.o -ЗJ-lli j i.Ql-UOr ,
где i - дискретный аргумент (число циклов вычисления функций У и Z) .
Содержимое R регистра 87 представляет сумму Ф + Ч в элементарных дискретных единицах угла, соответст- вук)щих раз1 ешающей способности датчика 9 поворота. Из очевидного соотношения
(8)
(8)
С учетом формулы (1) следует
21Гч
Ks t9)
(9)
Таким образом, когда после очередного импульса генератора 81 содержимое i счетчика 100 становится равным модулю fS| содержимого S регистра 87, в регистрах 88 и 89 оказываются соответственно коды величин
.У5 оС05(ф + Ч )-Хо51И|Ф + Ч | , (10)
25 у„з().ч-гоС05(Ф+7) (11)
Отсюда с учетом (2) и (3) следуют формулы
Ys t((ф-np)-(A + y)s,,(cp4.f)sig,(ф.pj
(12 ) Zs ()sitt()()cos().
Следующий после совпадения i и (S) импульс генератора 81 переводит распределитель 82 в состояние, в котором возбужден его пятый выход
Г|-, и по истечении времени задержки элемента 110 подает содержимое YS регистра 88, умноженное на величинуj
пропорциональную скорости и-)„ ПОВОрО
та платформы, с выхода множительного блока 92 на второй вход Сумматора 84, откуда оно поступает в регистр 88, Поскольку привод 6 поворота еще не запущен, то n О, и в регистре 88 оказывается код нуля. Этот же импульс подает содержимое Z регистра 89, умноженное на радиус F с выхода множительного блока 95, на первый вход сумматора 85, откуда оно поступает в регистр 89. Таким образом, в регистре 89 оказывается код величины s
Следующий импульс генератора 81 переводит распределитель 82 в сое- тояние, в котором возбужден его шестой выход Гб, и по истечении времени задержки элемента 110 подает код действительной высоты X подъема ротора относительно платформы с об- ратным знаком с выхода датчика 8 подъема через десятый вход е блока 11 на второй вход сумматора 85, В регистре 89 оказывается код разности ZgR-X,
Следующий импульс генератора 81 переводит распределитель 82 в состояние, в котором возбужден его седьмой выход г, и по истечении времени задержки элемента 110 подает код поправки У выхода блока 32 ввода через одиннадцатый вход е блока 11 на второй вход сумматора 85 В регистре 89 оказывается код величины ZjF-X+x .
Следующие два импульса генератора 81 не вызывают изменений в блоке 11 формирования сигнала управления приводом подъема, так как его двенадцатый и тринадцатый входы е. -гэ не используются.
Очередной импульс генератора 81 переводит распределитель 82 в состояние, в котором возбужден его де- сятый выход г , и по истечении времени задержки элемента 110 подает содержимое регистра 89 в регистр 91 и на первый вход сумматора 86. а содержимое регистра 88 - на второй
вход сумматора 86, Поскольку привод 6 поворота еще не запущен и в ре- гистре 88 содержится код нуля, в регистрах 90 и 91 оказывается код одной и той же величины йХ, ха
g 5
0 5 д
5
5
рактеризующей отклонение ротора от заданной наклонной плошадки:
4x 2sR-x-t-x :(А + Г)со5(Ф + Ч )(6 + 9)5;п(Ч + Г) .(14 .
Код этой величины поступает с выхода регистра 91 через первьш выход f блока 11 в блок индикации, а с выхода регистра 90 - на вход цифроаналогового преобразователя 102, откуда эта величина в аналоговой форме поступает на второй выход 2 блока I1 формирования сигнала уп-. равления приводом подъема,
Следующий импульс генератора 81 переводит распределитель 82 в состояние, в котором возбужден его первый выход г, На этом завершается первый цикл работы блока 1I, Его длительность равна т+9 периодов генератора 81 импульсов и, таким образом, зависит от числа m элементарных дискретных единиц угла в коде суммы «P + V. Как показано вьппе, при частоте генератора 81 импульсов, например, порядка десятков килогерц, дискретности измерения углов Р и f , например, порядка 0,1° и диапазоне значений суммы Ф + , например, порядка +90 длительность цикла работа блока И не превысит 0,1, а при более высокой частоте генератора 81 импульсов может быть уменьшена, С учетом инерционности приводов и механизмов экскаватора и медленного характера возможных изменений переменных величин на входе блока 11 ясно, что такое быстродействие блока 11 более чем достаточно.
Циклы работы блока 11 формирования сигнала управления приводом подъема непрерывно повторяются, причем в конце каждого цикла обновляются значения величин на выходах блока I1,
Блок 20 вь(числения высоты подъема, по исполнению идентичный блоку 1I, при подаче на него питания работает в основном аналогично блоку 11, Отличие в его работе состоят в следующем: параметры А и В формируемой плоскости и скорость LJn поворота платформы в блок 20 не вводятся, поэтому его четвертый, пятый и восьмой входы el,,, eg-И el не используются, в связи с этим после совпадения содержимого i счетчика
too и модуля содержимого регистра 87 в регистре 89 оказывается код величины
Zs ©siM( + 4)-bf :os(SP + f), (iS) )
а в конце каждого цикла работы блока 20 в регистре 88 оказывается код нуля; вместо величины R на седьмой вход е у блока 20 подается величи- на RCP- i в связи а этим следующий после совпадения 1 и isi импульс генератора 81 вызывает образование в регистре 89 кода величины ZgKcp ; - в блок 20 вводится параметр -hp и ве- личиныJ пропорциональные вьщвиже- ниям X-o ri i опг опор с обратными знакамиj для чего используются входы
11
- е , блока 20 соответственно
с одиннадцатого по тринадцатый; в связи с этим в конце каждого цикла работы блока 20 в регистре 89 и на первом выходе f блока 20 оказыва- ется код высоты подъема ротора над уровнем стояния экскаватора с обрат- ным знаком:
-Н Zs RCP оп
С©з1и()Ч СОз().р-К-ИоГ1 о оп; о П
06)
где Ко - коэффициент пропорциональности; второй выход fj блока 20 не используется.
На выходе преобразователя 15 кода образуется код высоты подъема ротора над уровнем стояния экскаватора
И -105111()+Ч со8СЯ Ч )КсР Х У1р+Моп,1 о опг
С
Этот код поступает на соответствующий вход блока индикации,
При подаче питания на блок 21 вычисления угла поворота на его выходе формируется сигнал в соответствии с одной из формул
.,..,.. Вд1(н;-Ь5 иУ)с1д.
фЛдгсзте +L cogs
(18)
( С$ ш
(h;-Lsi h1 )ct(5
.Lcosy Э где 9Г и п левый и правый расчетные углы поворота стрелы (платформы);
ю is
20 25
30
40
SO
5
Ч - угол наклона стрелы j отсчитываемый сверху вниз от горизонтальной плоскости.
Знак плюс в формулах (18) и (19) ;соответствует левой заходке, знак минус - правой. Выбор левой или правой заходки определяется положением переключателя 58 заходки, в зависимости от которого возбужден первый или второй вход р или g блока 21,
Ширина ВУ левого крыла заходки положительна для левой заходки, i а для правой заходки может иметь любой знак, Чирина Bjj правого крыла заходки отрицательна для правой заходки, а для левой заходки может -; иметь любой знак, Выбор В( или B(f и соответственно Р или ср определяется возбуждением десятого или одиннадцатого входа или g блока 1, которые связаны соответственно с первым и вторым выходами d и d блока 2 управления,Если, например, возбуждены первьгй, третий и четвертый выходы d ;(, dj и с г, блока 2 управления, то в блоке 21 вычисляет- ся угол фд по формуле (18); одновременно с подачей кода угла ф на первый информационный вход h блока 22 выбора угла на его второй информационный вход h 2 из блока 1 поступает- код программируемого угла Фл, , Поскольку возбужден первый управляющий вход Кд блока 22, на его выходе ока- зывается код меньшей из величин ф и Я в соответствии с выражением
, . (го)
Если же, например, возбуждены второй, третий и пятый выходы d, dj и dg блока 2 управления, то в блоке 21 вычисляется угол Ф по формуле (19); одновременно с подачей кода угла ф на первый информационный вход h блока 22 выбора угла на его второй информационный вход hj из блока 1 поступает код программируемого угла %, Поскольку теперь возбужден второй управляющий вход К блока 22, на его выходе оказ вается код больщей из величин Ф и Фг, в соответствии с выражением
Т Н.СХх{ф,Ср;| ()
Аналогично при операциях поворот на промежуточные углы производится выбор Фд , ф или ф„ .,
После включения питания устройства (за исключением генератора 60 импульсов блока 2 управления) машини экскаватора с помощью переключателе блока 32 ввода устанавливает такое значение поправки х, при котором идикатор величины ДХ, определяемой формулой (14), показывает нуль; тем самым сводится к нулю начальное значение отклонения ротора от заданной наклонной площадки, на одну из точе которой ротор был ранее установлен машинистом. После этого мапганист включает питание генератора 60 импульсов блока 2 управления, включае привод ротора и силовое питание приводов 5, 6, 7 подьема, поворота и хода. В результате на выходе датчик 47 появляется сигнал, пропорциональный току 1р двигателя ротора; затем, если в качестве начальной one- рации был выбран, например, один из ,поворотов (влево или вправо, на предельный или промежуточный угол), начинается разгон привода 6 поворота, и на выходах датчиков 48 и 49
появляются сигналы, пропорциональ- i ные соответственно весовой и объемной производительности Qg и Qo экскаватора.
Блок 23 формирования сигнала управления приводом поворота работает по принципу задания скорости поворота ( и соответственно ширины стружки ) из условия ограничения и стабилизации на заданном уровне наиболь- шей из трех текуших величин: относительного тока 1р/1рз двигателя ротора, относительной весовой производительности Qg/Qgj и относительной .объемной производительности Qej/Qo кроме того, выходной сигнал блока 23 ограничивается допустимой скоростью поворота с учетом оставшегося угла 9j ф, где Ф} - заданный угол поворота, код которого поступает в блок 23 из блока 22 выбора угла, и - действительный угол поворота платформы. Задача блока 23 сводится к вычислению и выбору наименьшей из величин i nCIpi-Ip) . Kn(bj-Ge) Kn(Q6b-Qo)
Ip coscpq cos ер
KJoj osq
(г
0
5
5
0
где Кп - коэффициент пропорциональности.
Здесь cos Я введен в связи с тем, что из-за серповидности реза текущая толщина стружки прямо пропорциональна созФ, поэтому для обеспечения нормального заполнения ковшей необходимо изменять ширину стружки, а следовательно, и скорость поворота обратно пропорционально cos
Таким образом, управление приводом 6 поворота в соответствии с,одной из первых трех величин (22) обеспечивает изменение скорости поворота пропорционально cos Р с коррекцией по текущему значению тока 1р двигателя ротора, весовой производительности Qg или объемной производительности QO.
В блоке 23 производится вычислен, ние величин
IPS-IP f.y(, :
,
«oi
выбор наименьшей из первых трех величин и умножение ее на Кпзесф. Полученная величина сравнивается с четвертой и выбирается наименьшая. Результат вычисления - величина, пропорциональная требуемой скоростиtJnj поворота платформы - преобразуется в аналоговую форму и поступает с выхода блока 23 через ключ 18 на вход привода б поворота.
Отработка заданного угла Ф поворота контролируется блоком 23 и блоком 12 сравнения кодов, гик как код текущего угла Ф поворота поступает на их вторые входы. Кроме того, код текущего тупает на первые входы е, и е, блоков I1 и 20, а код величины, пропорциональной текущей скорости и)п поворота, - на пятый вход eg блока П. Блок 20 вычисления высоты подьема периодически (с оцененным вьппе периодом) корректирует показания связанного с ним индикатора высоты подъема ротора в блоке индикации, а блок 11, кроме вычисления текушей величины отклонения ротора от формируемой наклонной площадки, поступающей через его первый выход f на со- ответствуюш:ий вход блока индикации, вырабатывает текушее значени Uj сигнала управления приводом подъема, поступающее через второй выход -fii
угла поворота пос- (
блока 1 1 .,и ключ 16 на вход привода 5 подъема, в каждом цикле вычисления величины U следзпот,ий после совпадения i и SI импульс j генератора. 81 блока 11 вызывает образование в регистре 88 кода величины, пропорциональной произведению . « В конце каждого цикла работы блока 11 содержимое регистра 88 сум- Q мируется с содержимым & X регистра 89, причём, если фч-Ч то на второй вход сумматора 86 поступает непосредственно код величины, пропорциональной ,, если то на вто- 5 рой вход сумматора 86 поступает код величины, пропорциональный , получаемый с помошью преобразователя 99 кода, Таким образом, приФ+Ч О в регистре 90 образуется код суммы 20 Х + , где К - коэффициент пропорциональности, а прйФ-ь Ч дО - код разности Л X -: .в виде содержимое регистра 90 может быть представлено формулой 25
UJ ЛX -KcYscJr,Sigh(Ф-) , (21.)
откуда, с учетом (12) и (1Д), следует формула30
и5 ()со5(Ф+Ч )-()5тСФ- -М )К-Х + х + (-,l-A + S bih(q +f)-b()co3(cp-i-t)uJn (гэ)
Последнее слагаемое в формуле (25) представляет, собой величину, пропорциональную производной от ее первого слагаемого, определяющего требуемое вертикальное перемещение ротЪра в зависимости от угла поворота платформы при формировании заданной наклонной площадки. Введение в сигнал Ug управления приводом подъема производной является весьма эффективным средством повышения динмической точности формирования заданной наклонной площадки .
Пока разность 7 достаточно велика, управление приводом поворота определяется наименьшей из первых трех величин (22) в зависимости от крепости экскавируемой , ее плотности, степени разрыхления горной массы и т.п..По мере отработ- ки заданного угла ф поворота и yMeifb- шения разности Р -ф наступает момен когда наименьшей из четырех величин
j Q 5 20 25
0
5
0
5
0
(22) становится величина - ф Она определяет в конце операции поворота равнозамедленное движение и точный останов привода 6 поворота приф- Р, В момент равенства ф-фз: блок 12 сравнения кодов вырабатывает сигнал, который поступает на первый переключающий вход С блока 2 управления и переводит распределитель 61 в состояние, при котором возбужден восьмой выход dg блока 2 Сигнал с восьмого выхода dn блоа
ка 2 устанавливает счетчик 14 импульсов в нулевое состояние, и сразу же после этого распределитель 61 переходит в состояние, при котором возбужден девятый выход dj блока 2, Сигнал с этог.о выхода через элемент И 53 открывает ключ 19, и с выхода блока 24 точного останова на вход привода 7 хода поступает формируемый блоком 24 сигнал управления, пропорциональный величине yto где tp и t - заданная и действительная толщина стружки. Величина -to поступает из блока I зададия программируемых координат на первые входы блока 24 точного останова и блока 13 сравнения кодов, величина t накапливается в счетчике 14 импульсов по мере перемегоения экскаватора и поступает на вторые входы блоков 24 и 13, По мере отработки приводом 7 хода заданного перемещения to и л меньшения разности to-t наступает момент, начиная с которого величина определяет равно- замедленное движение и точный останов привода 7 хода при t t, В момент равенства t t блок 13 сравнения кодов вырабатывает сигнал, который поступает на второй переключающий вход Cf блока 2 управления и переводит распределитель 61 в состояние, при котором возбуждены выходы блока 2, определяющие выполнение очередной операции поворота плат- формы, например, первый, третий и тестой выходы d, dgH dg блока 2, определяюгоие поворот влево на угол
Фг-.-и(ФДф;1,
Чередование операций поворота платформы на заданный угол и подачи ротора (наезда sKCKaaaTopaj на заданную толщину стружки продолжается до исчерпания возможностей ходового
Оборудования (например, шагаюгае-рель сового; или до выключения устройства по усмотрению машиниста. В случае сГовмещения операций поворота платфор мы и подачи ротора эти операции выполняются попарно таким образом, что при задании блоком 2 управления операции подачи ротора одновременно задается и очередная операция пово- рота платформы. Так как операция подачи ротора по времени короче, то по ее окончании распределитель 61 блока 2 управления переходит в следующее состояние, при котором и за- канчивается начатая операция поворота платформы.
В процессе формирования заданной наклонной площадки машинист имеет возможность при необходимости кор- ректировать установку ротора по высоте с выключением устройства или вносить поправку с помощью блока 32 ввода без выключения устройства, т.е. непосредственно в процессе работы экскаватора. Таким же образом он может с помощью блока 1 корректировать программируемые углы поворота и толщину стружки,, а с помощью блоков 25- 27,33-35 и задатчиков 39-41 - соот- ветственно.величины V , А, В, Вд, Вр, ctg(S-, Ipj , (ft , Qoj. Кроме того, с помощью задатчика 4 совмещения операций он может изменять способ отработки забоя.
При установке переключателя 59 -. режимов в положение, при котором возбужден его второй выход, устройство для контроля и управления роторным экскаватором работает в режиме ва- ловой отработки забоя вертикальными стружками. Работа устройства в этом режиме протекает в основном аналогично работе в описанном вьше режиме со следующими отличиями: парамет- ры А и В и поправка X в устройство не вводятся; привод 5 подъема не включается и в отработке забоя не участвует.
При установке переключателя 59 режимов в положении, при котором возбужден его третий выход, устройство для контроля и управления роторным, экскаватором работает в режиме валовой отработки забоя горизон- тальными стружками. Работа устройства в этом режиме протекает в основном аналоги°чно работе в режиме валовой отработки забоя вертикальными стружками с тем отличием, что операции подачи ротора на заданную толщину стружки выполняются не приводом 7 хода, а приводом 5 подъема путем опускания ротораj привод 7 хода не включается и в отработке забоя не участвует.
Новое исполнение блока 2 управления и блока 11 формирования сигнала управления приводом подъема, введение в устройство новых блоков -.блока 20 вычисления высоты подъема, блока 21 вычисления угла поворота, блока 22 выбора угла, блока 23 формирования сигнала управления приводом поворота, блока 24 точного останова, блоком 25-38 ввода, задатчиков 39-41 тока двигателя ротора, весовой и объемной производительноети, датчиков 42 и 43 углов продольного и поперечного наклона, датчиков 44, 45 вьздвижения опор, датчика 46 наклона стрелы, датчиков 47-49 тока двигателя ротора, весовой и объемной производительности, датчика 50 скорости, элементов И 51-53, элементов ИЛИ 54, 55, групп 56,-56(, элементов И, групп 57 элементов ИЛИ, переклн:)чателя 58 заходки и переключателя 59 режимов - и новое исполнение блоков 20, 21, 22, 23, 24, 173 а также осуществление новых связей между блоками устройства и внутри блоков обеспечивают повышение точ- нос.ти реализации требуемых технологических параметров и закономерностей отработки забоя, вследствие чего повышается производительность экскаватора, качество продукции и снижаются ее потери, улучшаются условия эксплуатации и повышается надежность экскаватора, его приводов, механизмов и конструкций.
В частности, повьппение точности формирования заданных наклонных площадок при селективной выемке полезных ископаемых обеспечивает, с одной стороны, повышение качества продукции - полезного ископаемого за счет уменьшения разубоживания (смешивания с пустой породой) и, с другой сторо- ны снижение потерь ископаемого; при формировании рабочих площадок стояния роторного экскаватора оно сокращает вспомогательные работы по зачистке и доводке рабочих площа
док, в настоящее времл контроль качества формирования площадок вьшол- няется либо визуально, либо, в лучшем случае, с помощью маркшейдерских инструментов. При визуальном контроле обеспечить требуемое качество формирования площадок практически невозможно; при маркшейдерском инструментальном контроле время формирования площадок с учетом многократных замеров и доводки формируемой поверхности слишком велико, что приводит к значительному снижению технической производительности экскаватора (на 15-30% по сравнению с режимом валовой выемки. Формирова- ние рабочих площадок стояния роторного экскаватора в настоящее время производится бульдозерами, причем объем земляных работ, вьшолняемых бульдозерами, может быть значительным; в среднем он составляет 0,25 м на 1 м формируемой поверхности, т.е. бульдозеры перелапачивают слой грунта толщиной в среднем 0,25 м по всей формируемой площадке. Устранение или значительное сокращение объема бульдозерных земляных работ при автоматизации процесса формирования рабочих площадок роторного экскаватора на основе использования устройства позволит снизить трудоемкость.
Повышение точности отработки заданных углов поворота и толщины стружки обеспечивает повьштение каче- ства отработки забоя в соответствии с паспортом горных работ, оптимизацию загрузки ковшей ротора, снижение динамических перегрузок приводов, механизмов и конструкций экскаватора,
снижение вероятности ударов ротора о боковой откос и, как следствие повышение показателей надежности экскаватора. Кроме того, приближение процесса замедления к оптимальному (в
смысле быстродействия) равнозамедленному движению приводит к сокращению длительности рабочих операций и, как следствие, к повьш1ению производительности экскаватора на
1-2%.
Регулирование скорости поворота роторной стрелы и соответственно ширины стружки из условия ограничения и стабилизации на заданном уровне тока двигателя ротора или производительности экскаватора обеспечивает повьшение его производительности в среднем на 5-10%. Кроме того,
оно приводит к ограничению перегрузок приводов, механизмов и конструкций роторного экскаватора и, как следствие, к повьштению показателей его надежности.
/- r Lr93.

| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1986 |
|
SU1456951A1 |
| Устройство для вычисления элементарных функций | 1983 |
|
SU1160429A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Аналого-цифровое множительное устройство | 1983 |
|
SU1117655A1 |
| Устройство для вычисления элементарных функций | 1983 |
|
SU1160454A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| Устройство для профессионального отбора операторов | 1990 |
|
SU1777165A1 |
| Преобразователь код-угол | 1984 |
|
SU1264345A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1807560A1 |
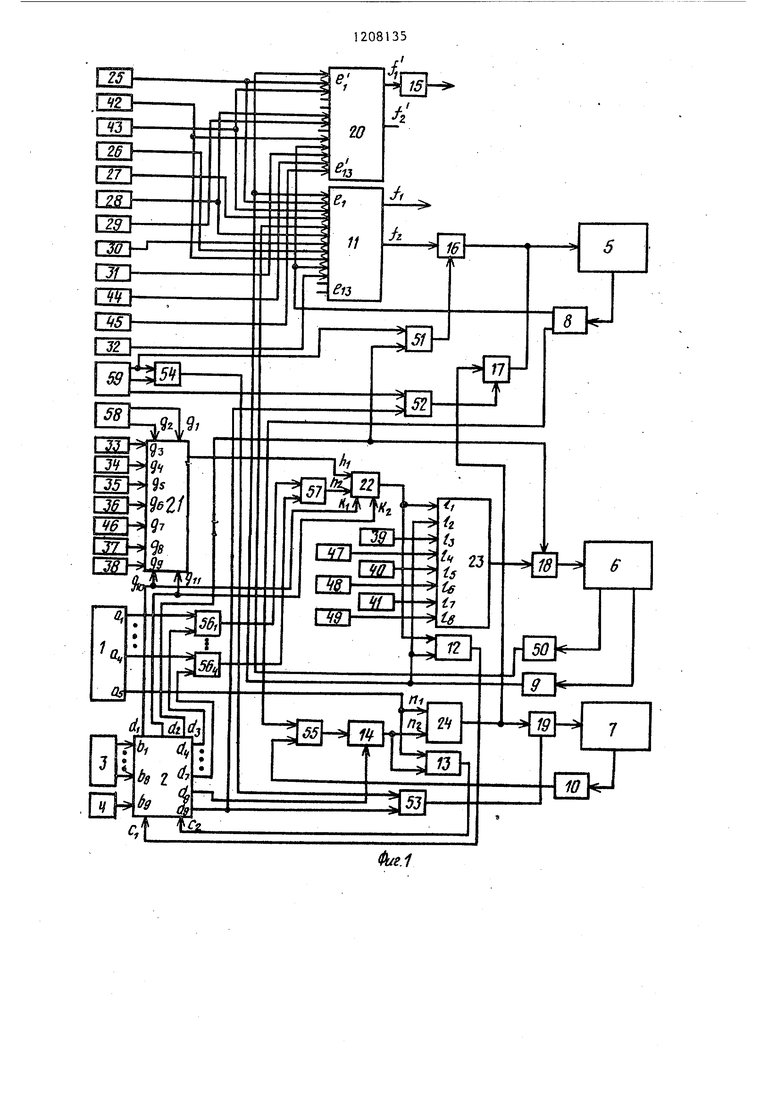
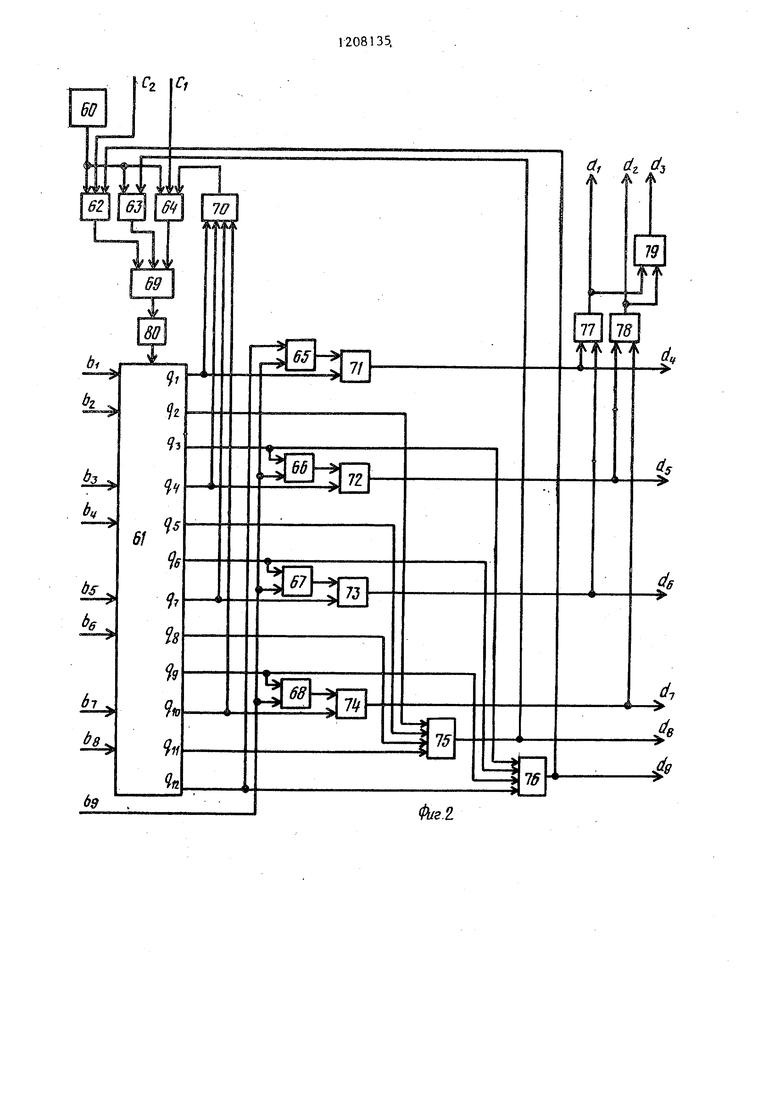
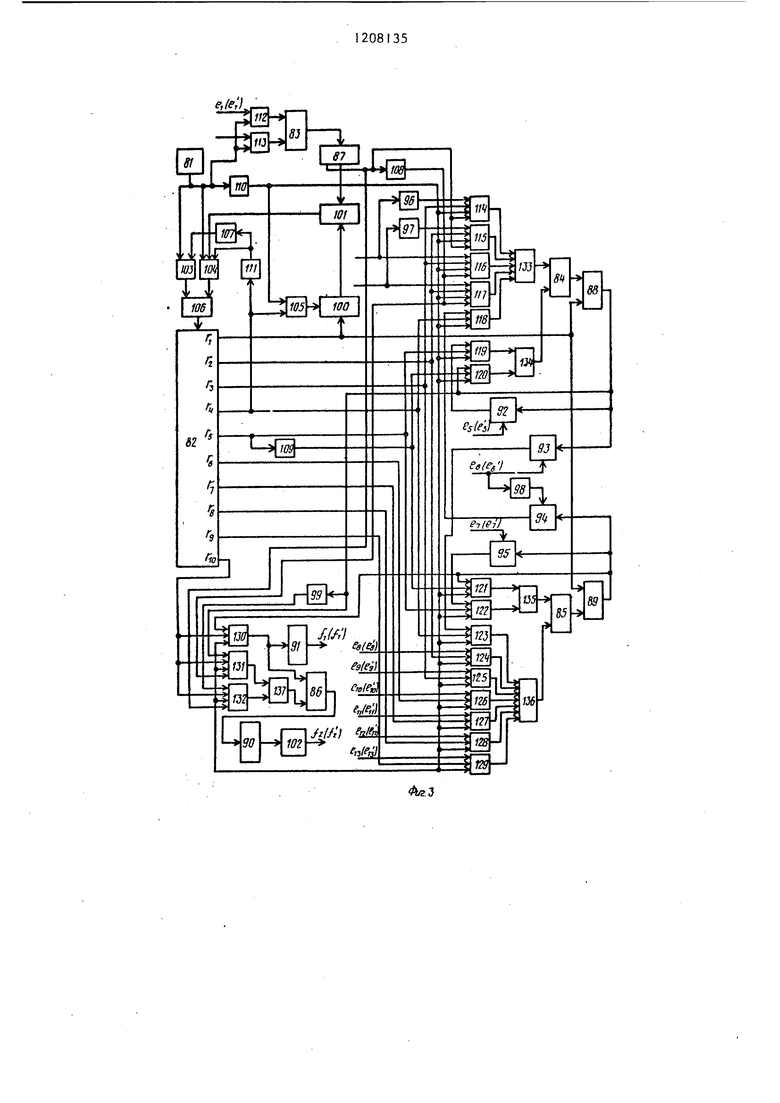
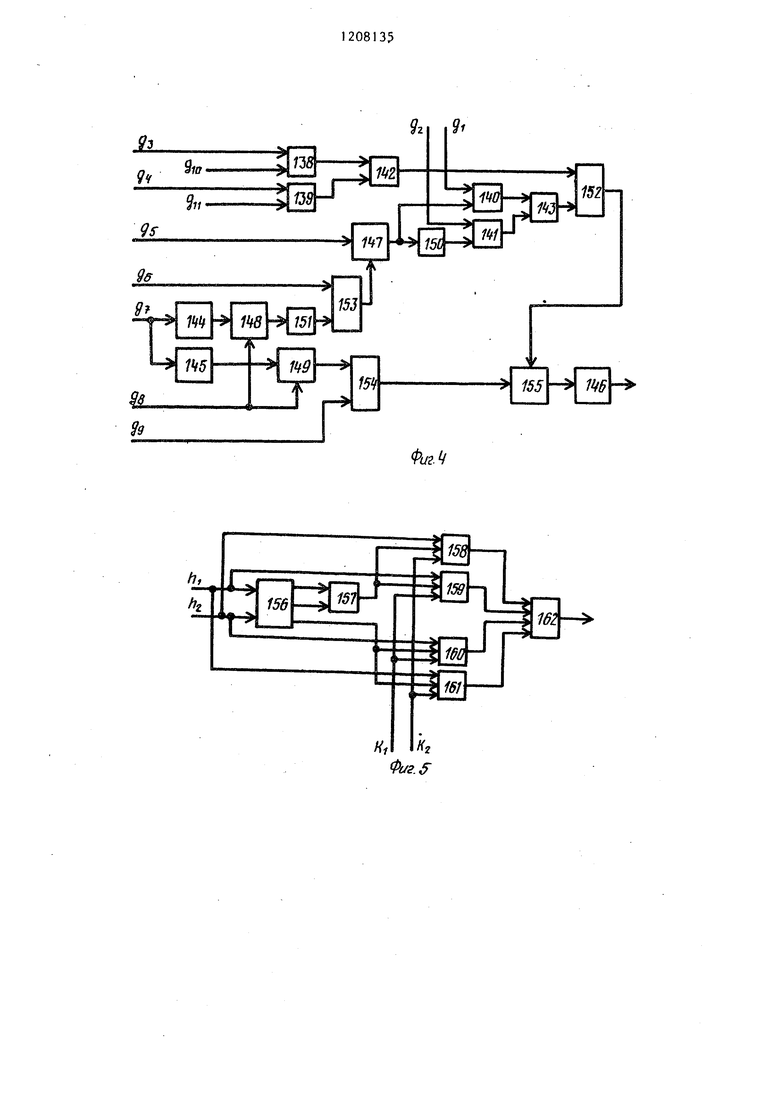
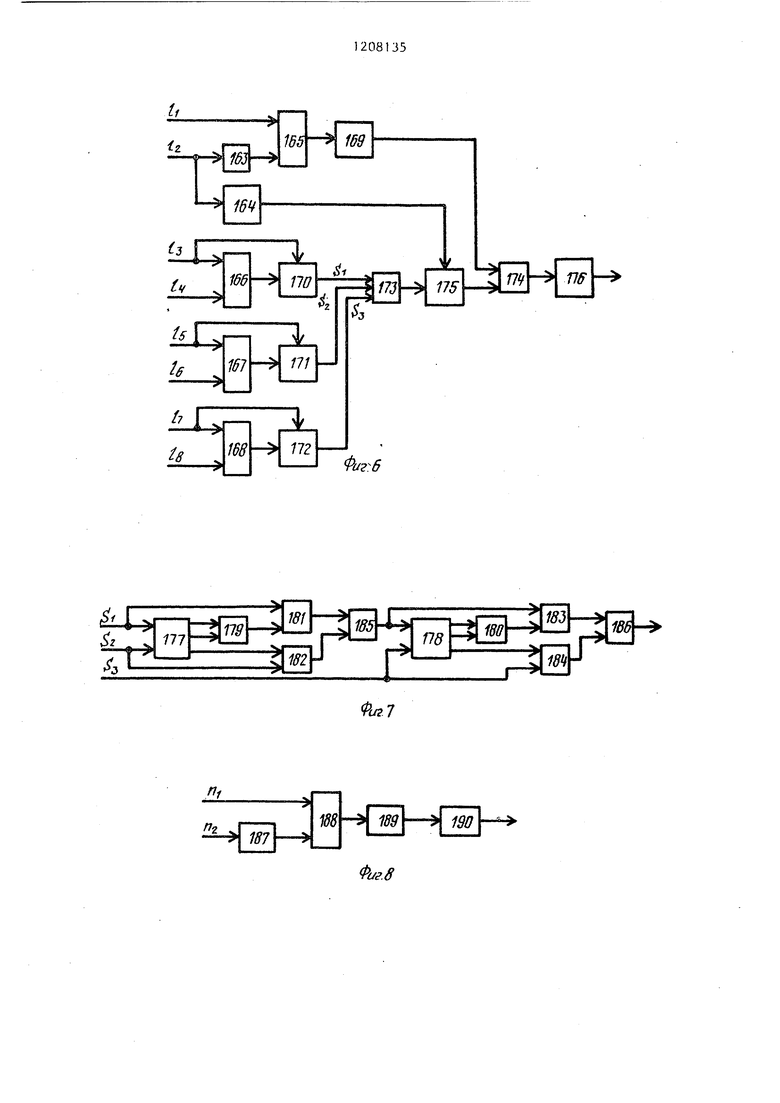
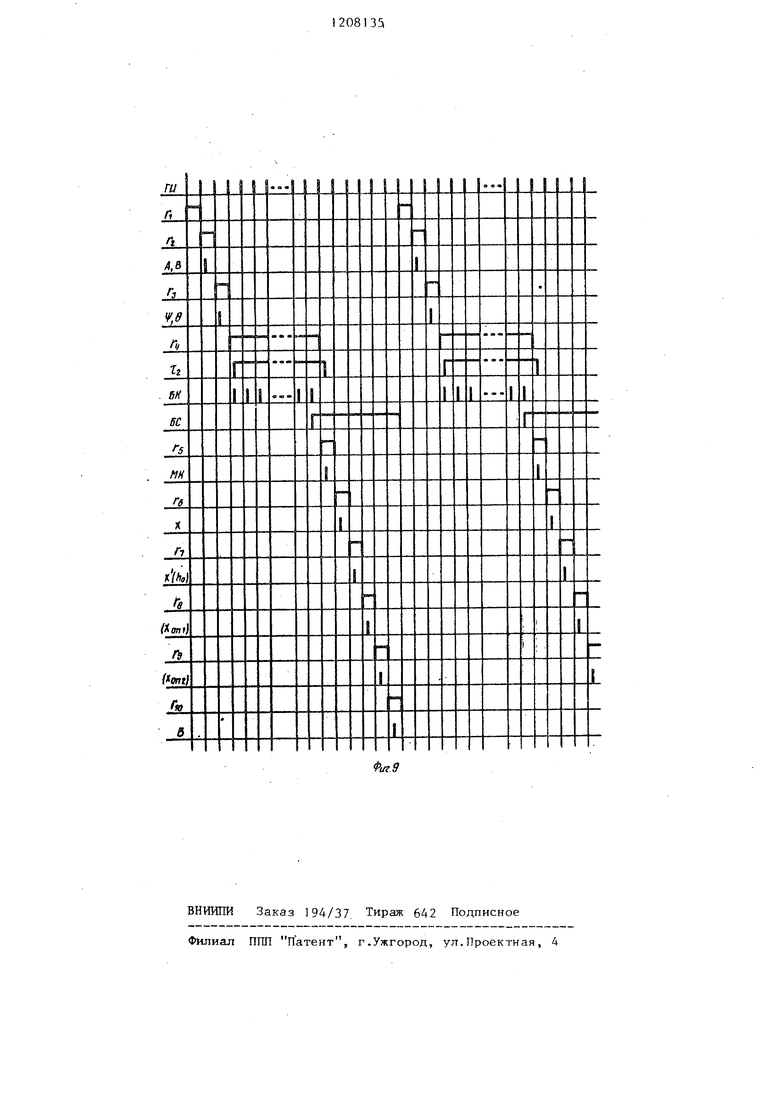

Фиг.б
fG
-Ч-
Я-
П8
т
I&K
г-
1B6
Пг
- т
| 0 |
|
SU213944A1 | |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 0 |
|
SU386075A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
