(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭКСКАВАТОРОМ
1
Изобретение относится к открытым разработкам месторождений полезных ископаемых и предназначено для автоматического управления роторным экскаватором, ведущим селективную выемку полезного ископаемого.
Известно устройство автоматического управления роторным экскаватором, используемое для управления приводом подъема стрелы ротора при выемке пласта. Устройство содержит датчик границы руда-порода, расположенный в зоне роторного колеса над поверхностью обрабатываемой стружки и закрепленный перед ротором на его стреле блок сравнения сигнала от датчика с заданным, интегратор реле времени и привод подъема стрелы 1.
В этом устройстве датчик границы закреплен неподвижно на роторной стреле экскаватора, и его местоположение относительно вертикальной оси роторного колеса определяется из соотнрпления:
h M -%, Н М -ctgYo, где h - расстояние от оси датчика (экрана)
до оси роторного колеса, м; М - радиус зоны чувствительности датчика, м;
So - толщина вертикальной стружки; Н - расстояние от датчика до нижней
кромки ротора, м; TO-угол раствора экрана датчика,
град.
J Известное устройство предназначено для выемки одного пласта.
Известно устройство автоматического управления экскаватором, содержащее датчик границы руда-порода, датчик угла наклона роторной стрелы, привод подъема стрелы, 10 блок сравнения, сумматор, интегратор, реле времени и усилитель 2.
Однако в известном устройстве для сохранения исходного положения датчика ископаемого в горизонтальной плоскости он совершает прямолинейные движения по верфикали и вдоль оси роторной стрелы только для выемки одного пласта при одном фиксированном значении угла наклона роторной стрелы, и в случае изменения положения роторной стрелы на высоте уступа для обработки других пластов из-за жесткого крепления датчика границы к тележке происходит смещение оси его коллиматора и уход зоны чувствительности датчика с границы ископаемого, что приводит к неверным показаниям датчика и, следовательно, к снижению эффективности селективной выемки полезного ископаемого.
Целью изобретения является повышение эффективности селективной выемки нескольких пластов полезного ископаемого, расположенных по высоте уступа.
Поставленная цель достигается тем, что устройство снабжено приводом вращения и датчиком вращения датчика границы рудапорода, причем выход последнего и выход датчика угла наклона роторной стрелы подключены ко входам сумматора, выход которого соединен через усилитель с приводом вращения датчика границы руда-порода, механически соединенного с датчиком границы руда-порода и датчиком вращения датчика границы руда-порода.
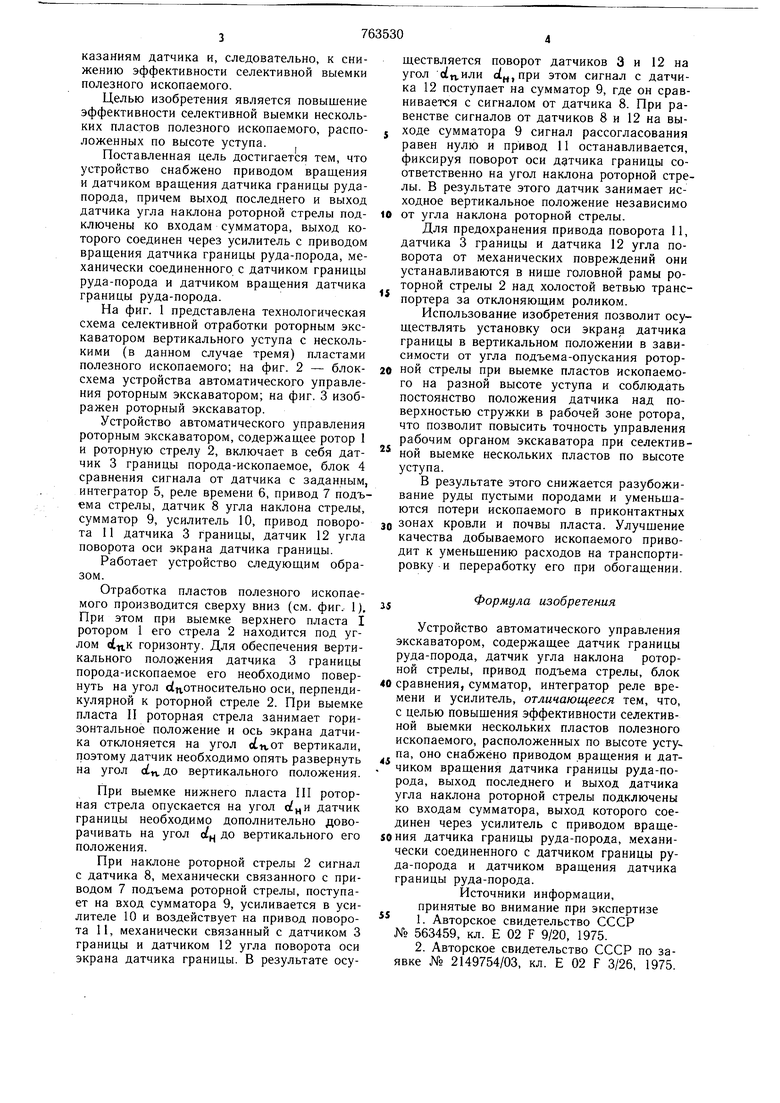
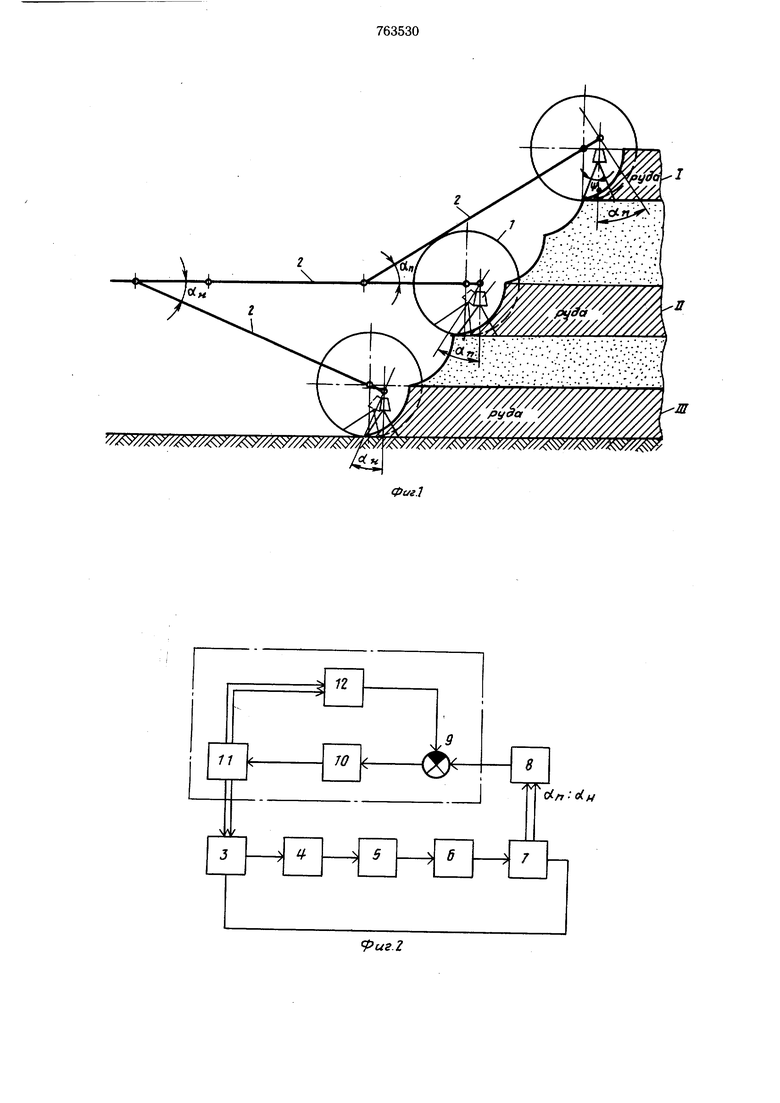
На фиг. 1 представлена технологическая схема селективной отработки роторным экскаватором вертикального уступа с несколькими (в данном случае тремя) пластами полезного ископаемого; на фиг. 2 - блоксхема устройства автоматического управления роторным экскаватором; на фиг. 3 изображен роторный экскаватор.
Устройство автоматического управления роторным экскаватором, содержащее ротор 1 и роторную стрелу 2, включает в себя датчик 3 границы порода-ископаемое, блок 4 сравнения сигнала от датчика с заданным интегратор 5, реле времени 6, привод 7 подъема стрелы, датчик 8 угла наклона стрелы, сумматор 9, усилитель 10, привод поворота 11 датчика 3 границы, датчик 12 угла поворота оси экрана датчика границы.
Работает устройство следующим образом.
Отработка пластов полезного ископаемого производится сверху вниз (см. фиг. 1), При этом при выемке верхнего пласта I ротором 1 его стрела 2 находится под углом ctuK горизонту. Для обеспечения вертикального положения датчика 3 границы порода-ископаемое его необходимо повернуть на угол с(п,относительно оси, перпендикулярной к роторной стреле 2. При выемке пласта II роторная стрела занимает горизонтальное положение и ось экрана датчика отклоняется на угол cin.OT вертикали, цоэтому датчик необходимо опять развернуть на угол drt, до вертикального положения.
При выемке нижнего пласта III роторная стрела опускается на угол (/цИ датчик границы необходимо дополнительно доворачивать на угол ci до вертикального его положения.
При наклоне роторной стрелы 2 сигнал с датчика 8, механически связанного с приводом 7 подъема роторной стрелы, поступает на вход сумматора 9, усиливается в усилителе 10 и воздействует на привод поворота 11, механически связанный с датчиком 3 границы и датчиком 12 угла поворота оси экрана датчика границы. В результате осуществляется поворот датчиков 3 и 12 на угол о ггили cij, при этом сигнал с датчика 12 поступает на сумматор 9, где он сравнивается с сигналом от датчика 8. При равенстве сигналов от датчиков 8 и 12 на выходе сумматора 9 сигнал рассогласования равен нулю и привод 11 останавливается, фиксируя поворот оси датчика границы соответственно на угол наклона роторной стрелы. В результате этого датчик занимает исходное вертикальное положение независимо
от угла наклона роторной стрелы.
Для предохранения привода поворота 11, датчика 3 границы и датчика 12 угла поворота от механических повреждений они устанавливаются в нище головной рамы роторной стрелы 2 над холостой ветвью транспортера за отклоняющим роликом.
Использование изобретения позволит осуществлять установку оси экрана датчика границы в вертикальном положении в зависимости от угла подъема-опускания роторной стрелы при выемке пластов ископаемого на разной высоте уступа и соблюдать постоянство положения датчика над поверхностью стружки в рабочей зоне ротора, что позволит повысить точность управления рабочим органом экскаватора при селективной выемке нескольких пластов по высоте уступа.
В результате этого снижается разубоживание руды пустыми породами и уменьшаются потери ископаемого в приконтактных
0 зонах кровли и почвы пласта. Улучщение качества добываемого ископаемого приводит к уменьщению расходов на транспортировку и переработку его при обогащении.
Формула изобретения
Устройство автоматического управления экскаватором, содержащее датчик границы руда-порода, датчик угла наклона роторной стрелы, привод подъема стрелы, блок
0 сравнения, сумматор, интегратор реле времени и усилитель, отличающееся тем, что, с целью повышения эффективности селективной выемки нескольких пластов полезного ископаемого, расположенных по высоте усту па, оно снабжено приводом вращения и датчиком вращения датчика границы руда-порода, выход последнего и выход датчика угла наклона роторной стрелы подключены ко входам сумматора, выход которого соединен через усилитель с приводом враще$ония датчика границы руда-порода, механически соединенного с датчиком границы руда-порода и датчиком вращения датчика границы руда-порода.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 563459, кл. Е 02 F 9/20, 1975.
2.Авторское свидетельство СССР по заявке № 2149754/03, кл. Е 02 F 3/26, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU563459A1 |
| Устройство автоматического управления роторным экскаватором | 1979 |
|
SU881210A1 |
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU673704A1 |
| Устройство автоматического управления роторным экскаватором | 1972 |
|
SU446601A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1969 |
|
SU253715A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| КАРЬЕРНЫЙ ЭКСКАВАТОР | 2005 |
|
RU2296860C1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Способ селективной разработки угольных пластов | 1973 |
|
SU496364A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
N V
Риг.2 с фиг.5
