1
Известны устройства для автоматического и полуавтоматического управления телескопом, содержащие приборные приводы звездного времени, угла прямого восхождения, ввода угловых поправок и угловой силовой следящий привод с их каскадно соединенными синусно-косинусными вращающимися трансформаторами (СКВТ).
Описываемое устройство отличается от известных тем, что в нем в цепь каскадно соединенных СКВТ включен дополнительный СКВТ, кинематически связанный с задающим тахогенератором и двигателем, отрабатывающим угол в автоматическом и скорость в полуавтоматическом режимах управления. Это упрощает конструкцию при сохранении точности управления телескопом.
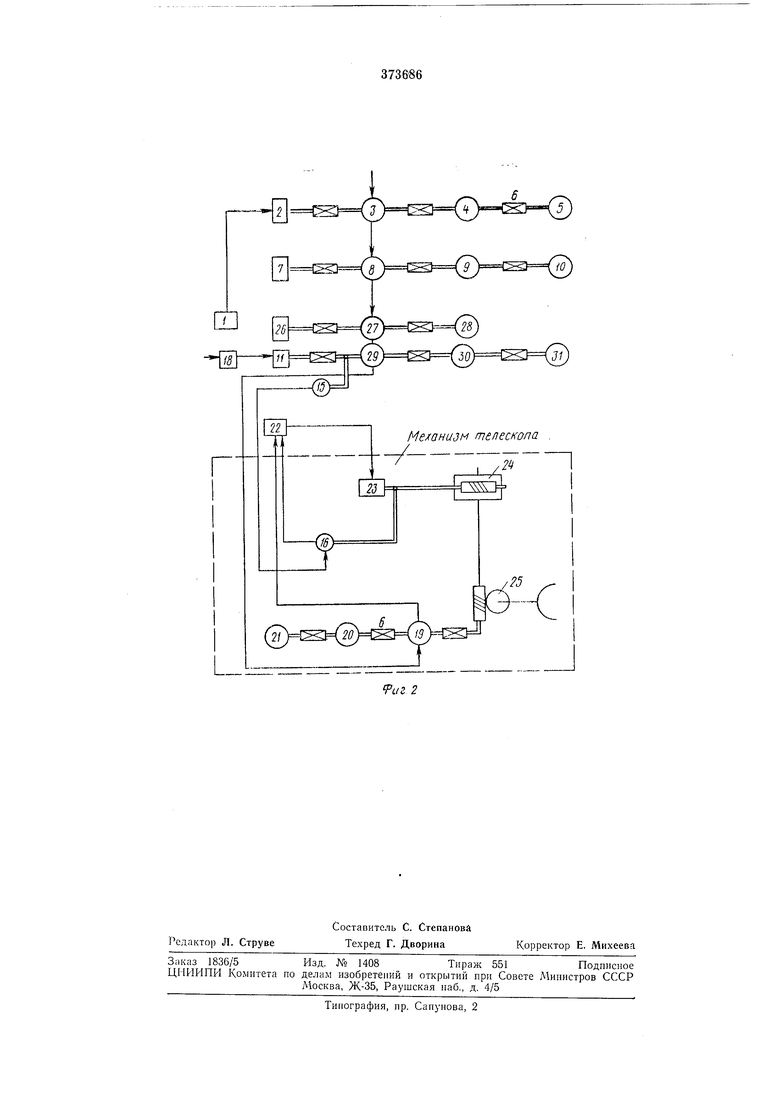
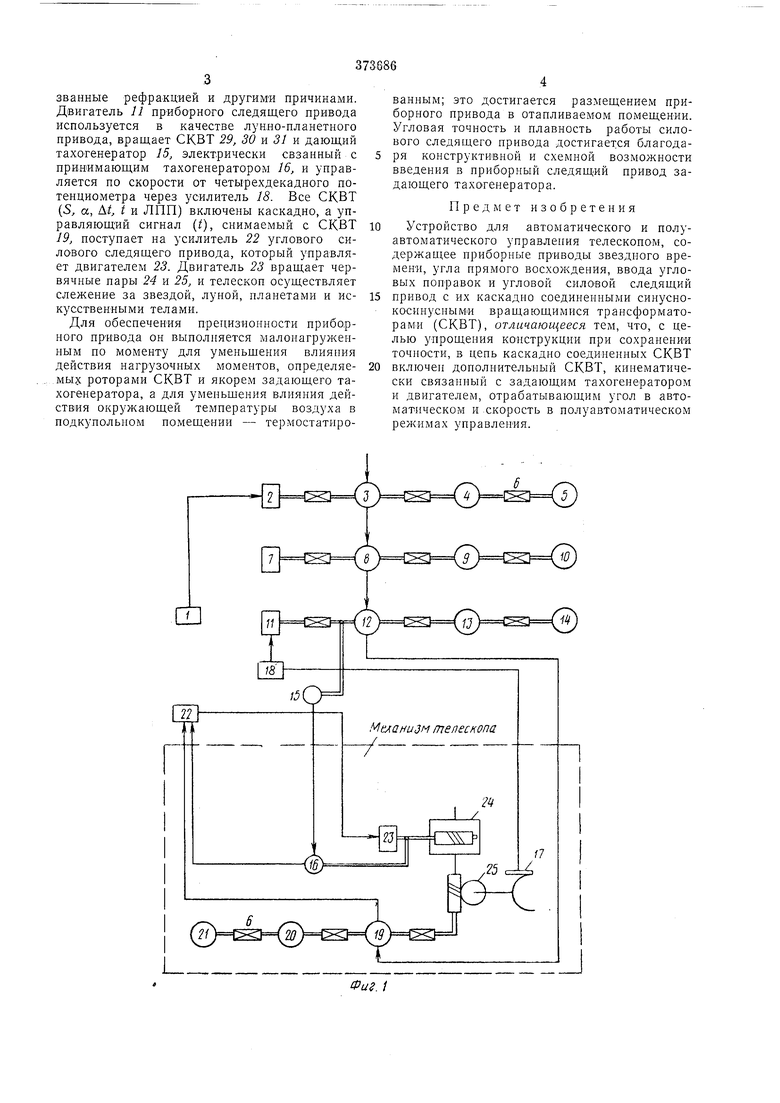
На фиг. 1 показана схема для автоматического ведения телескопа при работе от фотогида; на фиг. 2 - для полуавтоматического ведения телескопа за звездой, луной, планетами и искусственнымИ телами.
В режиме автоматического ведения генератор / стабильной частоты питает маломощный синхронный двигатель 2, приборного привода звездного времени (S), который вращает СКВТ 3, 4 и 5 точного, среднего и грубого отсчетов через цилиндрические редукторы 6. Двигатель 7 приборного привода угла прямого восхождения (а) вращает СКВТ 8, 9 v( 10
через соответствующие редукторы. Двигатель // приборного следящего привода вращает СКВТ фотогида (ФГ) 12, 13 v. 14 и задающий тахОгенератор 15, электрически связанный с принимающим тахогенератором 16. Двигатель 11 управляется фотодатчиком 17 через усилитель 18. Все СКВТ (S, а, ФГ) включены каскадно с СКВТ часового угла (t) 19, 20 и 21 (на схеме показано включение
СКВТ только точного отсчета, т. е. 3, 8, 12 и 19), а управляющий сигнал, снимаемый с СКВТ 19, поступает на усилитель 22 углового силового следящего привода, который управляет двигателем 23. Двигатель 23 вращает
червячные пары 24 и 25 редуктора телескопа, и телескоп осуществляет слежение за звездой.
В полуавтоматическом режиме генератор стабильной частоты / питает маломощный
синхронный двигатель 2 приборного привода звездного времени (S), который вращает СКВТ 3, 4 11 5 точного, среднего и грубого отсчетов через редукторы 6. Двигатель 7 приборного привода угла прямого восхождения
(а) вращает через соответствующие редукторы 6 СКВТ 8, 9 1 10. Двигатель приборного привода счетно-рещающего прибора 26 вращает СКВТ 27 и 25 лунно-планетного привода (ЛПП) точного и среднего отсчетов через редукторы 6 на углы поправок iA/, вызванные рефракц-ией и другими причинами. Двигатель 11 приборного следящего привода используется в качестве лунно-планетного привода, вращает СКВТ 29, 30 и 31 и дающий тахогенератор 15, электрически свзанный с принимающим тахогенератором 16, и управляется по скорости от четырехдекадного потенциометра через усилитель 18. Все СКВТ (S, а, М, t и ЛПП) включены каскадно, а управляющий сигнал (t), снимаемый с СКВТ 19, поступает на усилитель 22 углового силового следящего привода, который управляет двигателем 23. Двигатель 23 вращает червячные пары 24 и 25, и телескоп осуществляет слежение за звездой, луной, планетами и искусственными телами.
Для обеспечения прецизионности приборного прнвода он выполняется малонагружеиным по моменту для уменьщения влияния действия нагрузочных моментов, определяемых роторами СКВТ и якорем задающего тахогенератора, а для уменьщения влияния действия окружающей температуры воздуха в подкунольном помещении - термостатированным; это достигается размещением приборного привода в отапливаемом помещении. Угловая точность и плавность работы силового следящего привода достигается благодаря конструктивной и схемной возможности введения в приборный следящий привод задающего тахогенератора.
Предмет изобретения
Устройство для автоматического и полуавтоматического управления телескопом, содержащее приборные приводы звездного времени, угла прямого восхождения, ввода угловых поправок и угловой силовой следящий
привод с их каскадно соединенными синуснокОСннусными вращающимися трансформаторами (СКВТ), отличающееся тем, что, с целью упрощения коиструкции при сохранении точности, в цепь каскадно соединенных СКВТ
включен дополнительный СКВТ, кинематически связанный с задающим тахогенератором и двигателем, отрабатывающим угол в автоматическом и скорость в полуавтоматическом режимах управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОПЕРНИКАНСКИЙ ПЛАНЕТАРИЙ | 1971 |
|
SU305502A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ НЕРЕМЕННОЙ ОПТИЧЕСКОЙ РЕДУКЦИИ КЛИНОВЫХМЕХАНИЗМОВ | 1971 |
|
SU318910A1 |
| ДВУХКООРДИНАТНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ СЛЕДЯЩАЯСИСТЕМА | 1972 |
|
SU331370A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ АТМОСФЕРНОЙ РЕФРАКЦИИ В УСЛОВИЯХ КОСМИЧЕСКОГО ПОЛЕТА | 2014 |
|
RU2566379C1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Двухкоординатный следящий привод | 1989 |
|
SU1764029A1 |