Изобретение относится к системам автоматического управления, в частности, к фотоэлектрическим системам автоматического слежения за движущимися световыми объектами с использованием отсчетных оптических клиньев.
Известны устройства для компенсации неременной оптической редукции клиновых механизмов в комбинированных следящих системах наблюдения за световыми объектами, содержащих замкнутый и разомкнутый контуры регулирования перемещения оптического клинового механизма. Разомкнутый контур является скоростной следящей системой, а точная коррекция положения изображения осуществляется позиционной системой фотогида.
Недостатком известных устройств является сравнительно низкая точность стабилизации изображения объекта в ноле зрения оптической трубы, так как оптическая редукция клинового механизма устройства переменна и при постоянной скорости движения объекта скорость движения изображения объекта зависит от угла поворота клинового механизма.
Предложенное устройство свободно от указанного недостатка, так как в нем скорость поворота клинового механизма в функции сигнала скоростной системы изменяется по закону секанса, по этому же зако}1у изменяется и коэффициент усиления и в системе фотогида. Введение секансной завнсимости определяется те.м, что переменная оптическая редукция клипа гк sec ф, где: срт- угол новорота клипа; /,,.„ - оптическая редукция клнпа при ф 0.
Получение сигнала компенсации осуществлено в предложеппом устройстве путем примененпя жестко связанного с иснолпнтельпой осью клинового механизма формирователя пелниейпого сигнала, выполненного, например, в виде секапспого нотенцнометра, который подключеп к соответствующим усилителямнреобразователя.м скоростной следящей системы н системы фотогида, управляющих псполпительпымп двпгателя.ми этих систем.
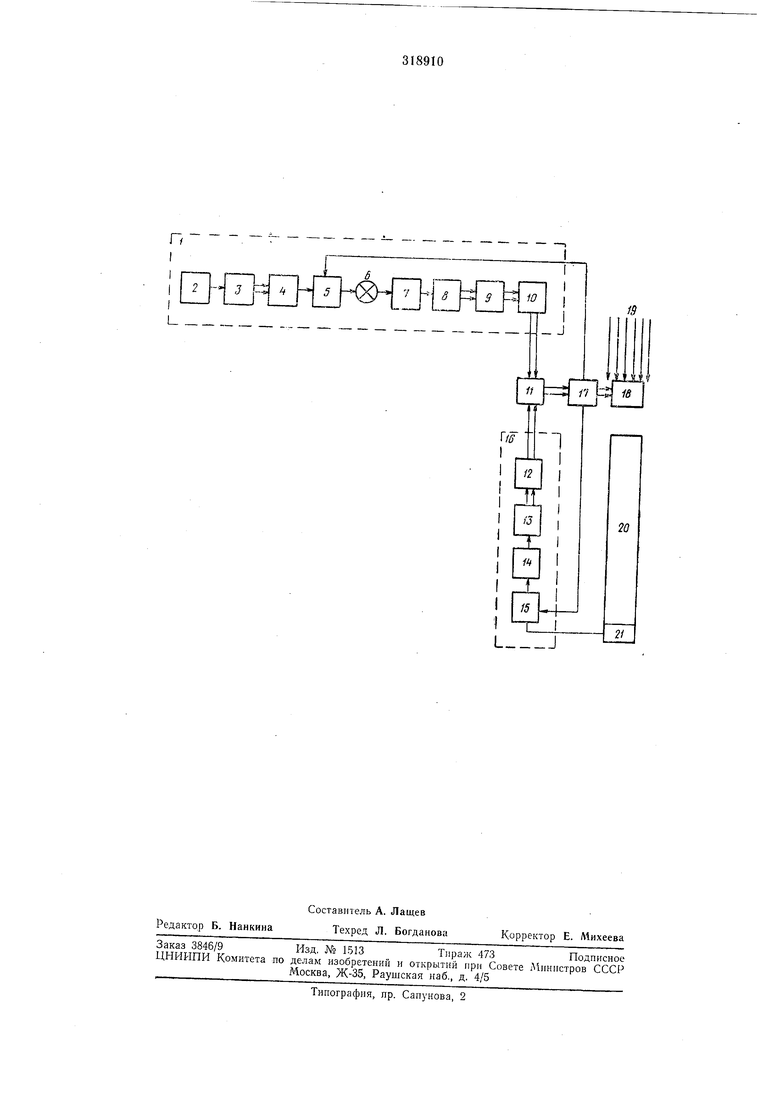
Па чертеже изображена блок-с.хема предложенного устройства для автоматической комнепсации оптической редукции клиновых меха ппзмов.
Устройство содержит разомк)1утый контур 1, представляющий собой скоростпую следящую систему, включающую датчик скорости
2, двигатель 3, задающий скорость перемещепия изображения объекта, связапный с тахогеператором 4, который нодключен через нелинейный усилитель-преобразователь 5 сигпала управления но скоростн к элементу сравполнительным двигателем 8 скоростной системы; двигатель 8 через тахогенератор 9 и редуктор 10 жестко связан с одним из входов механического дифференциала 11, второй вход которого подсоединен к редуктору 12 исполнительного двигателя 13, электрически связанного через усилитель 14 с нелинейным усилителем-преобразователем 15 сигнала позиционной системы фотогида 16. Кроме того, выход механического дифференциала жестко связан с формирователем 17 нелинейного сигнала компенсации, управляющим перемещением клинового механизма 18 и подключенным ко входам усилителей-преобразователей 5 а 15 сигналов управления обоих каналов.
С помощью клинового механизма формируется оптическое изображение светового объекта 19, наблюдаемое оптической трубой 20, на которой установлен датчик системы фотогида 21, подключенный к усилителю-преобразователю 15 этой системы.
При использовании двухкоординатного управления в устройстве используются соответственно два разомкнутых контура скоростной следящей системы и два замкнутых контура позиционной системы фотогида.
Слежение за световым объектом (удержание изображения движущегося объекта на оптической оси) осуществляется посредством комбинированной фотоэлектрической системы, воздействующей на клиновой механизм 18 и состоящей из скоростной системы 1 (система грубого сопровождения), задающей скорость вращения клина в соответствии со скоростью движения объекта 19, и позиционной системы фотогида 16, более точно удерживающей изображение объекта на оптической оси трубы 20. При наличии в разомкнутом контуре слежения сигнала, пропорционального не скорости перемещения объекта, а непосредственно положению объекта, может быть реализована комбинированная следящая система «угол- угол.
Скоростная система / воздействует на клиновой механизм 18, и входной сигнал для скоростной системы снимается с тахогенератора 4, соединенного с задающим двигателем 3, управляемым датчиком 2. Скоростная система имеет отрицательную обратную связь по скорости, сигнал которой снимается с тахогенератора 9 скоростной системы и подается на элемент сравнения 6. Ошибка скоростной системы выбирается позиционной системой фотогида 16, исполнительный двигатель которой 13 также воздействует на клиновой механизм через механический дифференциал 11, связанный с редуктором 10 и 12 соответствующих контуров управления.
На исполнительную ось клинового механизма с ценой оборота 360° установлен формирователь 17 нелинейного сигнала компенсации с секансной зависимостью; этим формирователем может быть секансный потенциометр. Как один из вариантов схемного рещения может быть использован косинусный датчик (вращающийся трансформатор, косинусный потенциометр), который совместно с усилителемпреобразователем 5 скоростной системы вырабатывает сигнал управления.
При неизменной скорости движения объекта УО скорость поворота клинового механизма,
0 задаваемая скоростной системой, будет равна VK Vo IK VO-IK sec rp. С учетом оптической редукции клинового механизма, скорость перемещения изображения объекта в поле зрения оптической трубы 20 соответствует
5 скорости движения объекта с ощибкой скоростной системы такой же, как и при нулевом положении клинового механизма при ф 0. В замкнутом контуре системы фотогида 16 для компенсации переменного коэффициента
0 усиления используется схема автоматической регулировки усиления. Управляющий сигнал для этой схемы поступает от формирователя 17 нелинейного сигнала компенсации, установленного на исполнительной оси клинового механизма, а элементом данной схемы является нелинейный усилитель-преобразователь 15. включенный в цепи усилителя 14, питающего исполнительный двигатель /5 системы фотогида. В результате действия автоматической
0 регулировки усиления коэффициент усиления в системе фотогида остается неизменным, так как коэффициент усиления усилителя-преобразователя 15 /С1 Дозесср, и коэффициент передачи клинового механизма
17
(/(о - значение коэффициента усиления при ср-О).
Предмет изобретения
Устройство для автоматической компенсации переменной оптической редукции клиновых механизмов в комбинированных следящих системах наблюдения за световыми объектами, содержащих замкнутый и разомкнутый контуры регулирования перемещения оптического клинового механизма, отличомщееся тем, что, с целью повышения точности стабилизации изображения движущихся объектов в поле зрения оптической трубы, устройство снабжено жестко связанным с исполнительной осью клинового механизма формирователем нелинейного сигнала компенсации,
5 выполненным, например, в виде секансного потенциометра, подключенного ко входам усилителей-преобразователей сигнала управления в замкнутом и разомкнутом контурах регулирования перемещения клинового механизма, которые подсоединены к исполнительным двигателям упомянутых контуров регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1325402A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Следящая система | 1977 |
|
SU732807A1 |
| Фотоэлектрический гид телескопа | 1977 |
|
SU661500A1 |
| Фотоследящая система телескопа | 1980 |
|
SU894684A1 |
| Следящая система микроперемещений | 1976 |
|
SU717716A1 |
| Устройство для управления уровнем металла в кристаллизаторе установки непрерывной разливки стали | 1982 |
|
SU1052317A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Оптическая следящая система астрономического телескопа | 1976 |
|
SU678465A1 |
| Преобразователь кода в угловое положение вала | 1981 |
|
SU963042A1 |