1
Изобретение относится к области измерения параметров движения, в частности, к измерителям скоро,сти подвижных объектов, основанным на интегрировании действующего на объект ускорения.
Известны интегрирующие акселерометры, подобные центробежным регуляторам. В этих приборах инерционная масса маятника смещена относительно оои вращения и подвес маятника составляет с осью вращения угол,
близкий К - . Под действием ускорения, на4
правленного вдоль оси вращения, инерционная масса маятника меняет свое положение и во.здействует на скорость вращения приводного двигателя. Скорость вращения оси подвеса маятника служит мерой ускорения, а полный угол поворота оси - мерой скорости. Такие интегрирующие акселерометры чувствительны к ускорениям, направленным вдоль оси вращения подвеса маятника, к ускорениям, направленным вдоль оси вращения подвеса маятни ка, и к ускорениям, направленным по нормам к этой оси. Для устранения чувствительности по одной из осей необходимо, чтобы центр инерционной массы, лежал или на оси подвеса маятника или на перпендикуляре к оси вращения, проходящем через ось подвеса маятника. Однако в этих положениях прибор неработоспособен.
.При малых отклонениях центра массы от нормали к оси вращения, проходящей через ось подвеса маятника, прибор может работать, но требуются чрезвычайно больщие скорости вращения маятника, поэтому угол отклонения маятника выбирают близким к -.
В предложенном акселерометре инерционная масса маятника вы1полнена в виде двух одинаковых параллелепипедов, совмещенных одной гранью, расположенной в плоскости, перпендикулярной плоскости рамки и проходящей через ось ее вращения, и сдвинутых друг относительно друга вдоль оси вращения рамки.
Это позволяет исключить влияние ускорения, перпендикулярного к оси чувствительности акселерометра.
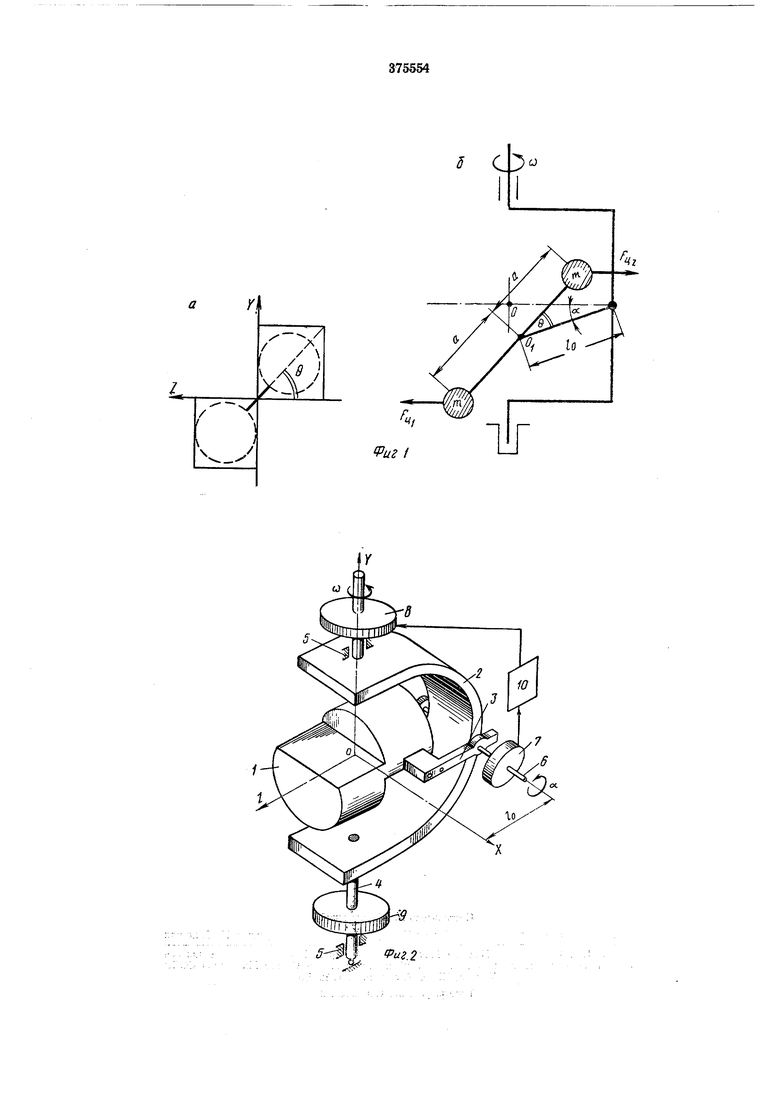
На фиг. 1,а показано инерционное тело маятника в плоскости рамки подвеса; на фиг. 1, б - изолированная модель прибора; на фиг. 2 - конструктивная схема интегрирующего акселерометра.
Инерционное тело (фиг. 1,а) выполнено в виде двух параллелепипедов, совмещенных одним ребром так, что их грани взаимно параллельны. Подвес маятника расположен по оси Z. При этом линия, соединяющая центра
масс параллелепипедов (главная ось инерции
тела) составляет угол - с линией подвеса
4
И осью вращения ролико1В (ось У). В общем случае инерционное тело может быть образовано двумя одинаковыми телами любой формы, а не только параллеленипедами, но обязательно, чтобы главная ось инерции .полученной фигуры (инерционного тела маятника) составляла с осями У и Z угол, близкий к
Это условие позволяет представить инерционное тело маятника в виде двух тел с массой т, связанных друг с другом жестко связью длиной 2а, к середине которой прикреплен подвес маятника длиной /о (фиг. 1,6). В установившемся режиме
aF, sin (а + в) mwty cos а, где
/цт((с08 а + в) - /в(1 - COS a.)w - ускорение, направленное но оси вращения рамюи.
При малых значениях угла а получаем
2wlc, cos а
Sln2(a + в)
полагая, что 0 45°, имеем
т1/
2wlo cos а
COS 2а
Выполняя прибор таким образом, чтобы в начальном положении а 0, получаем окончательно
0,
./ш.
Интегрирующий акселерометр (фиг. 2) содержит инерционное тело / маятника, укрепленное на рамке 2 при помощи подвеса 3. Оси 4 рамки укреплены в подщипниках корпуса 5. Ось 6 подвеса 5 обеспечивает возможность дв1ижения тела / в плоскости рамки 2 и расположена симметрично относителньо подшипников корпуса 5. Длина подвеса 3 такова, что при его расположении перпендикулярно оси 4 вращения центр тяжести тела 1 лежит на ООН вращения рамжи 2. На оси 6 укреплен датчик 7 угла, а на оси 4 двигатель 8 и датчик 9 угла, например, импульсный датчик любого типа. Акселерометр содержит также усилитель 10, вход которого подключен к датчику 7 угла подвеса 3, а выход - к двигателю 5.
Акселерометр работает следующим образом.
В исходном состоянии подвес 3 расположен по нормали к оси 4 рамюи 2, сигнал на выходе датчика 7 равен нулю и рамка 2 неподвижна. При появлении ускорения, направленного вдоль оси вращения рамки 2, тело 1 отклоняется от начального положения, на 1выходе датчика 7 появляется сигнал и рамка 2 вращается с такой скоростью, что центробежная сила, приложенная к маятнику, уравновещивает инерционную силу.
Сигнал, пропорциональный скорости движения объекта с укрепленным на нем акселерометром, получается при использовании импульсного датчика 9 следующим образом. Определяя время одного оборота оси 4 (при ее угловой скорости ш) путем заполнения интервала между импульсами датчика 9 импульсами стабильной частоты с периодом т, получаем среднюю угловую скорость w рамки 2 при
2л
прохождении угла .
2л
1
Wi
NI
Лт
tt
V Ш . J2/0 J
Взяв переменный щаг интегрирования и заменяя интегрирование суммированием,получим
2
SJ- NI
атс
V
-с/г,
При отклонении подвеса маятника 3 от исходного положения под действием ускорения W возникает погрешность, относительная величина которой
to.
Д .
ЗДа«
100% «1,5Да-100%,
2(1-2Да2)
где Да - отклонение подвеса маятника 3 от начального положения. При значениях угл. мин относительная погрещность измерения не превышает 0,001%.
Предмет изобретения
Интегрирующий акселерометр, содержащий
рамку, укрепленную в корпусе на подшипниках, двигатель, связанный с осью рамюи, маятник, укрепленный на рамке с возможностью движения в плоскости рамки вдоль оси ее вращения, датчик угла поворота маятника и
усилитель, включенный между датчиком угла и двигателем, отличающийся тем, что, с целью исключения влияния ускорения, нормального к оси чувствительности акселерометра, инерционная масса маятника выполнена
в виде двух одинаковых параллелепипедов, совмещенных одной гранью, расположенной в плоскости, перпендикулярной плоскости рамки и проходящей через ось ее вращения, и сдвинутых один относительно другого вдоль
оси вращения рамки.
j c.:)o
Vuz /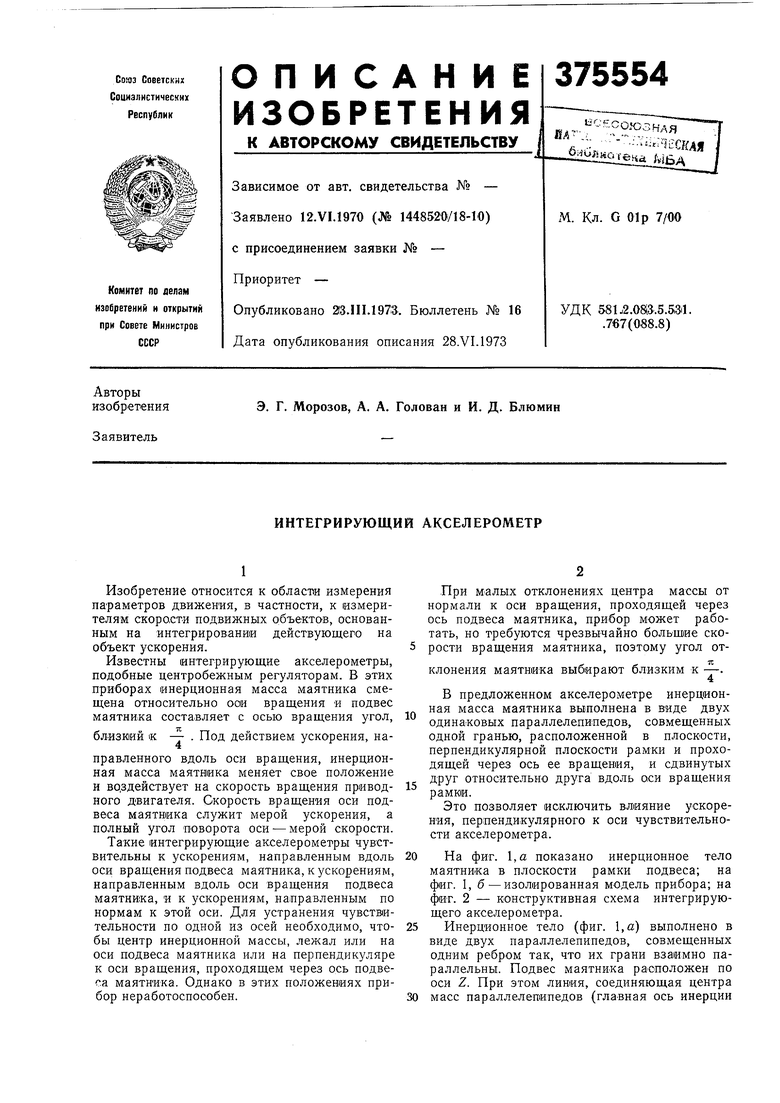

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий акселерометр | 1978 |
|
SU794540A1 |
| Интегрирующий акселерометр | 1980 |
|
SU883744A1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| Интегрирующий акселерометр | 1982 |
|
SU1099286A2 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ИЗМЕРЕНИЯ АЗИМУТА НАКЛОННОЙ СКВАЖИНЫ | 1971 |
|
SU295871A1 |
| Маятниковый кренодифферентометр | 1977 |
|
SU678286A1 |