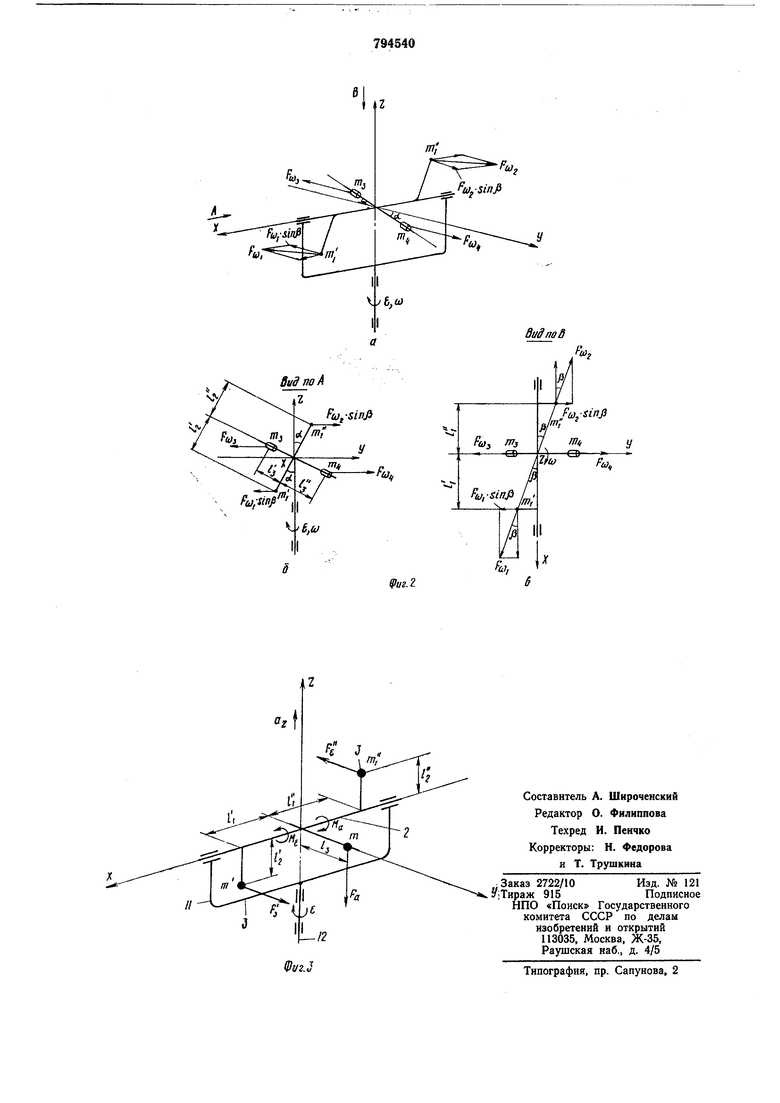
от угловой скорости вращения платформы, при наличии угла рассогласования а маятника. На фиг. 2,6 и 2,в показаны проекции фиг. 2,а на плоскости zy и ху соотв-етственно. ,, Рш, -инерционные силы, вызванные скоростью вращения (о платформы, действующие на инерционные грузы т и , F -инерционные силы, вызванные скоростью вращения w платформы, действующие на инерционные грузы тз и m. Моменты от сил f ш, и F. и мюменты от сил Fa,, и F относительно оси подвеса маятника (ось х) направлены в противоположные стороны, а следовательно, сумма|рный момент этих сил путем пОДбора Miacc грузов тз и m и их взаимного перемещения может быть сделан равным нулю.Путем несложных преобразований можно получить выражение для суммарного момента от центробежных сил, действующих на маятник, в виде М.о - sin а cos а OTJ ( + fn (ly - -тЛ/;Г-/ 4(/ЭТ-(1) Из выражения (1) следует, что суммарный момент от центробежных сил М. на маятник равен нулю цри любом угле рассогласования а при условии, что выражение в квадратных скобках равно нулю, т. е.: «; (ly + ni, (ly - т, (Г,у т, (IIY -0. Это услош1е практически легко достигается при балансировке маятника путем изменения балансировочных масс /тгз и /«4 и плеч tz и при обеспечении необходимого дебаланса маятника по отношению к линейному ускорению а. В частности тз может равняться нулю при mj + mj - Ая и /2 - /2 3 - з; ,,, Л lf, хадимой степенью точности обеспечивается устранение погрешности (нелинейности) от влияиия угловой скорости платформы при любых углах рассогласования а маятника. , Равновесие маятника будет определяться в этом случае только линейным ускорением а. и угловым ускорением платформы е. Акселерометр работает следующим образом. При воздействии линейного ускорения а. вдояь измерительной оси г возникают инерционные силы приложенные к м,аятНН1С/2 и грузам d (см. фиг. 6). Обо значим: fs, Fe -инерционные силы от угловых ускорении, действующих на грузы 3 (ml и т ). fa - равнодействующая инерционлых -сил от линейнОГО ускорения uz, действующая на центр масс маятника (точка 0). Момент от сил инерции Ма, вызванный линейным ускорением uz при наличии угла поворота маятника 2, равен: УНд z/И-/, а,(2) где т - полная масса маятника; /3 - расстояние до центра масс О от оси маятника. Момент MS , вызванный угловым ускорением грузов 3, равен М, cos -/2 cos я + Р -/2 COS а, (3) где Л cos р. Ре cos р - проекции инерционных сил F- и s , воздействующих на грузы 3 с массами ml и , на плоскость, перпендикулярную к оси маятника х, или Же S (т 1 /2 cos а + wj 1 /з cos а). (4) При некотором угле рассогласования маятника а моменты Ма и М уравновесятся за счет обратной связи, т. е. - S (т 1 Г + пг 1 Q, а угловое ускорение равно dy dt nzj ii /2 + щ 1 2 Угол поворота вала двигателя равен -p-priflf/fa (6) 1 1 2 f . fi h J J T. e. угол поворота вала двигателя пропорционален двукратному интегралу от измеряемого ускорения. Исполнительный механизм 13 срабатывает при повороте вала двигателя на определенный угол, соответствующий заданному значению двукратного интеграла. Положительный эффект от использования предлагаемого изобретения состоит снижении суммарной погрешности aKsceлерометра вследствие того, что измерительный орган расположен на платформе, жестко связанной с валом двигателя, т. е. отсутствует зубчатая передача, наличие которой приводит к появлению погрешности от сил трения в зубчатом зацеплении увеличению погрешности при воздействии вибрации; умёньш ается погрешность от боковых линейных ускорений, определяе угловым смещением маятника при воздействии измеряемого ускорения, посколь у момент, действующий на маятник От боновых ускорений, изменяется по направлению с частотой вращения платформы и,
следовательно, среднее значение этого момента за один оборот платформы равно нулю.
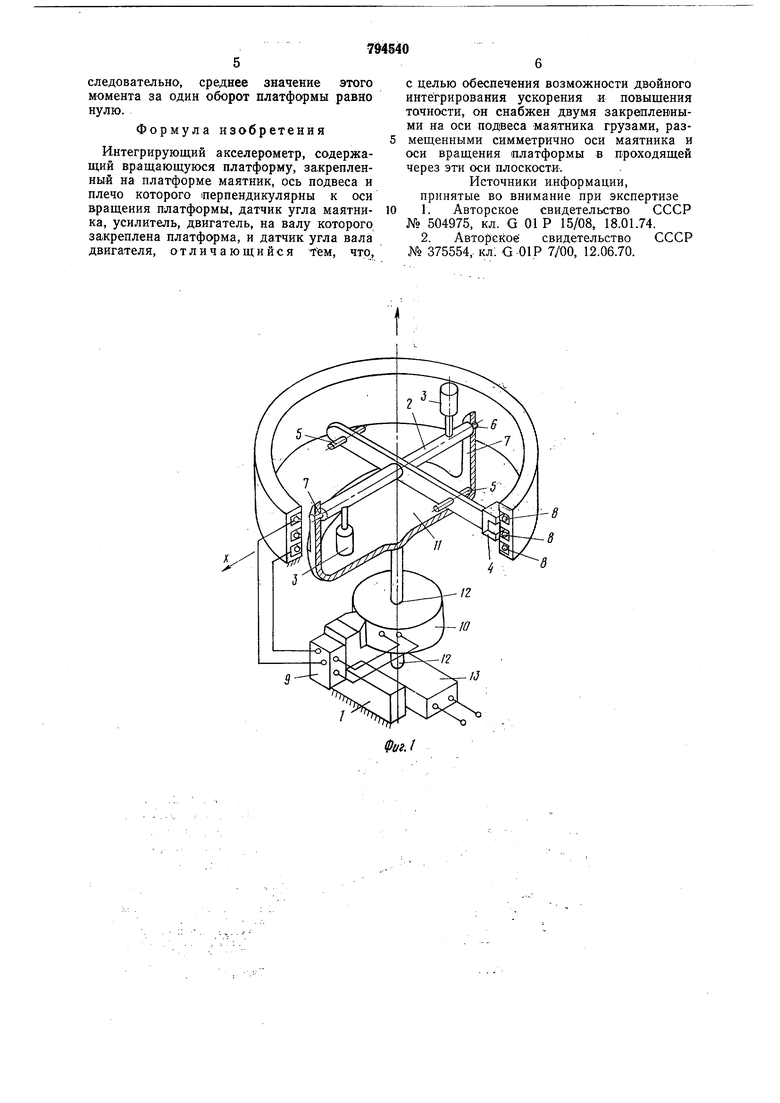
Формула изобретения
Интегрирующий акселерометр, содержащий вращающуюся платформу, закрепленный на платформе маятник, ось подвеса и плечо которого 1перпендикуляр.ны к оси вращения платформы, датчик угла маятника, усилитель, двигатель, на валу которого закреплена платформа, и датчик угла вала двигателя, отличающийся тем, что.
с целью обеспечения возможности двойного интегрирования ускорения и повышения точности, он снабжен двумя закрепленными на оси подвеса маятника грузами, размещенными симметрично оси маятника и оси вращения платформы в проходящей через эти оси плоскости.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 504975, кл. G 01 Р 15/08, 18.01.74.
2.Авторское свидетельство СССР № 375554, кл: G 01Р 7/00, 12.06.70.

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий акселерометр | 1980 |
|
SU883744A1 |
| Интегрирующий акселерометр | 1982 |
|
SU1099286A2 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1781579A1 |
| ИНТЕГРИРУЮЩИЙ АКСЕЛЕРОМЕТР | 1973 |
|
SU375554A1 |
| АНТЕННОЕ УСТРОЙСТВО | 1995 |
|
RU2173921C2 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ИМПУЛЬСА УСКОРЕНИЯ | 1991 |
|
RU2016387C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
Sad по
PuiSinfl
Fug
ВидпоВ
/a -sinji
Jm
Fuj гпз
mi,
-.- ев -€&Ifu
f, 1,
Уиг.г
