(54) МАЯТНИКОВЫЙ КРЕНОДИФФЕРЕНТОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ КРЕНА И ДИФФЕРЕНТА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2486098C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
| Измеритель угла наклона подвижного объекта | 1985 |
|
SU1255858A1 |
Изобретение относится к приборостроению, в частности к устройствам для определения углов крена и дифферента подвижных объекто с помощью пространственного физического, маятника.
Известнь маятниковые кренометры с компенсацией воздействия на них поступательных ускорений, содержащие физический маятник, на оси вращения которого установлен исполнительный элемент, управляемый по сигналам акселерометра, расположенного на корпусе подвижного объекта П н 2.
Однако при статических и динамических углах наклона корпуса объекта акселерометр, кроме действующего ускорения, измеряет и составляющую ускорения силы тяжести. Это приводит к неточности компенсации поступательио о ускорения, действующего на физический маятник и, в конечном счете, к ошибке определения угла Kperfa. Указанные недостатки исключены в маятниковом кренодифферентометре с самокомпенсациейг, применяемом на летательных аппаратах, в котором аселерометры как чувствительные элементы петли обратной связи установлены на физическом маятнике.
Ближайщим по технической сущности и достигаемому результату является маятниковый кренодифферентометр с самокомпенсацией 3J.
Он состоит из пространственного физического маятника, на осях подвеса которого установлены датчики углов и дифферента, а также датчики момента, управляемые через усилители от акселерометров, расположенных на маятнике. Управление датчиками момеша по сигналам от акселометров позволяет изменять собственную частоту физического маятника за счет умеЛщения его жесткости. При этом уменьщается чувствительность кренодифферентометра к поступателы1ым ускорениям на частотах, превышающих частоту собственных колебаний. В этом кренодифферентометре имеет место уменьшение его чувствительности лишь к переменным поступательным ускорениям. Чувствительность же к постоянным ускорениям не изменяется. Уменьшение чувствительности кренодифферентометра к переменным поступательным ускорениям сопровождается ухудшением его устойчивости. Управлениедаэтйками моментов по cm-налам от акселерометров не позволяет изменять инерционность физическоIO маятника, поэтому при уменьшении р езуль тирующей жесткости маятника повышается его чувствительность к возмущениям, обусловленным -угловым движением.
Целью изобретения является повышение динамической точности кренодифферентометра. Указанная цель достигается тем, что в извест- ю ньтй кренодифферентометр, содержаший прог странственный физический маятник, на осях подвеса которого установлены дат-чики углов крена и дифферента и датчики момента, управлйёкше 4epef усйлит1гли от akcfertepeKiefpofe, рас- 15 толоженных на маятнике, введены гироскопические датчики угловой скорости, соединенные с датчиками момента через усилительно-преобразующие блоки.
Датчики угловой скорости установлены на 20 маятнике и каждый из них соединен с соответствующим датчиком момента. Введение в канал управления информациио параметрах углового движения физическогомаятника позволяет управлять амплитудно-частотной харак- 15 теристнкой кренодифферент-ометрз, что -способствует повышению его динамической точности в условиях качающегося основания. Кроме того, это позволяет обеспечить нечувствительность физического маятника к поступательным ЗО ускорениям.
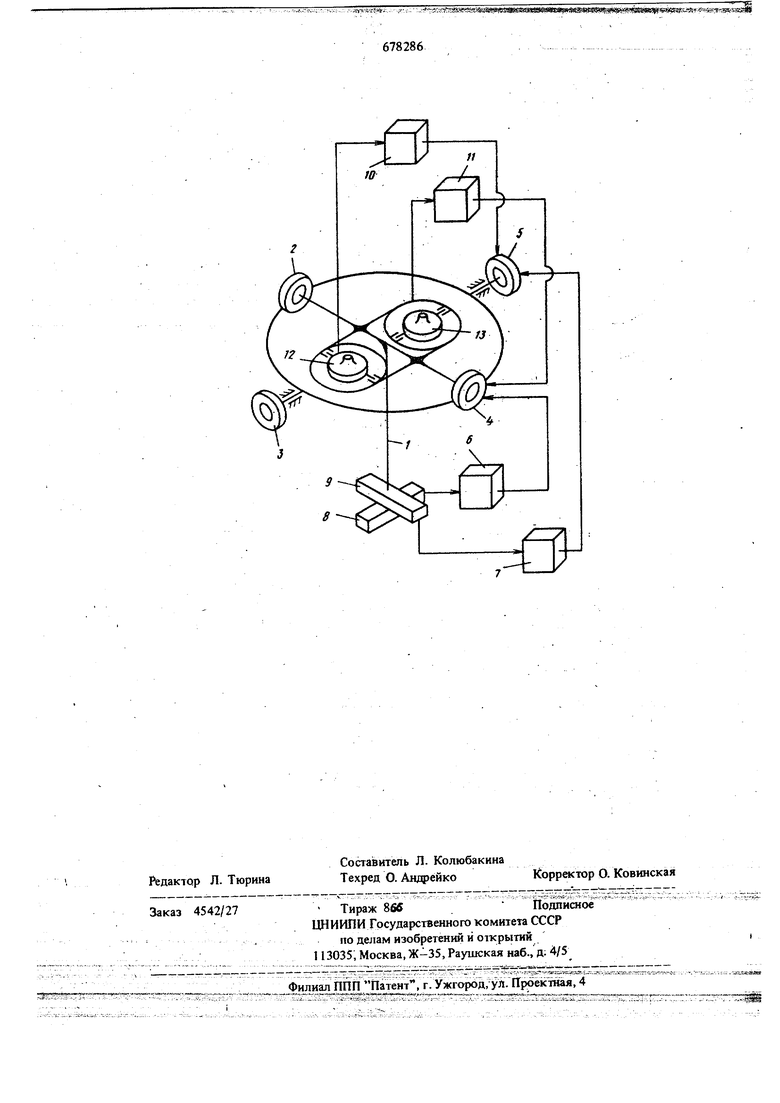
На чертеже изображена кинематическая схема . кренодиффёрен-гометра.
Он coia;ёpжит пространственный физический г вятник 1, на ося подвеса которого установ- 35 лень датчики крена 2 и дифферента 3. Для управления движением маятника на осях подвеса установлены также датчики 4 и 5 момента. Управляющие воздействия датчиков момента формируются через усилители 6 и 740 по сигналам акселерометров 8 и 9 и через усилительно-преобразующие блоки 10 и lino сигналам гироскопических датчиков 12 и 13 угловой скорости. Акселерометры 8 и 9, а также гироскопические датчики 12 и 13 45 1ираметров углового движения установлены на теле физического маятника.
По сигналам акселерометров 8 и 9 датчики 4 й 5 формируют вдоль осей подвеса физического маятника моменты, компенсирующие вли- so )яние инерционных моментов от действия линейных ускорений. Гироскопические датчики 12 и 13 параметров углового движения с помощью усилительно-преобразующих блоков 10 и 11 и датчиков 4 и 5 формируют вдоль осей 55 подвеса моменты, пропорциональные углу, угловой скорости и угловому ускорению фйзйческо№ ШгШ|Ка; что эйШвментао ввёдашюГтак
назь1ваемых, фиктивных параметров - жесткоста, коэффициента демпфирования и момен-га инерции.
Это позволяет в. широких пределах и достаточно эффективно управлять амплитудно-частотной характеристикой физического маятника.
Если в качестве датчиков 12 и 13 параметров углового движения маятника применять гароскопические датчики угловой скорости, то каждый из усилительно-преобразующих блоков 10 и 11 должен иметь усилитель, интегрирующий усилитель к дифференцирующий усилитель. В случае применения в качестве датчиков 1.2 и 13 параметров углового движея интегрирующих гироскопов, каждый из усилительно-преобразующих блоков 10 и И должен иметь усилитель, дифференцирующий уС11питель и дважды дифференцирующий усилитель. ,
Использование новых элементов - гироскопических датчиков параметров углового движения и усилительно-преобразующих блоков по.зволяет обеспечить повышение динамической точности известного маятникового кренодифферентометра в условиях качки объекта -и компенсацию влияния поступательных ускорений с обеспечением необходимого запаса устойчивости по амплитуде.
Формула изобретения
Маятниковый кренодифферентометр, содержащий пространственный физический маятник, на осях подвеса которого расположены датчики углов крена и дифферента и датчики момента, управляемые через усилители от акселерометров установленных; на маятнике, о т л и ч аю щ и и с я тем, что, с целью повышения динамической точности кренодифферентометра в условиях; качки объекта, в него введены гироскопические датчики угловой скорости и усилительно-преобразующие блоки, причем указанные датчики установлены на маятнике и каждый из них соединен с соответствующим датчиком момента через интегрирующий усилитель, усилитель и дифференцирующий уситель, входдацие в усилительно-преобразующие блоки.
Источники информации, приня1Ъ1е во внимание при экспертизе
- 1. Авторское свидетельство СССР N 395712, кл. G 01 С 9/12, 1971..
8
678286
