Изобретение относится к станкостроению и вычислительной технике и предназначено для пропраммного уп1ра1влей ия стан1ка1М«.
Из)вестные сИ(Отемы позицию.няого пропраммиого п,равлевия станкамя, содержащие задатчи1К, датчик и реверсивный счетчик, соединенный через де шифрато/р с блокам цифровой кН Д -1каЦК|И, .
Предлагаемая система, с целью ее упрощения, содержит комайдный блок и логические схемы «ИЛИ, «ЗАПРЕТ и совпадения, причем выхсаы {эвввроивното счетч1И1ка подключены ко входаьм схемы совладения, выход которой соединен со входом командного блока, два выхода которого подключены к соотверствующ1И1М двум входам раверсишного счетчика, а ,пер1вые и втарые выходы зацатчика и датчика соединены с дщумя соответстующимл вхо1да1М,и Нарвой и второй схем «ЗАПРЕТ, выходы которых и nepiBbie выходы задатчика и датчика П10Дключе1НЫ к ооот1вет1ствующи)м двум BxoaaiM первой и второй схем «ИЛИ, выходы которых соедилены с оуммнрующйм и вычитающиим ВХОДЯМИ реверсивного счетчика.
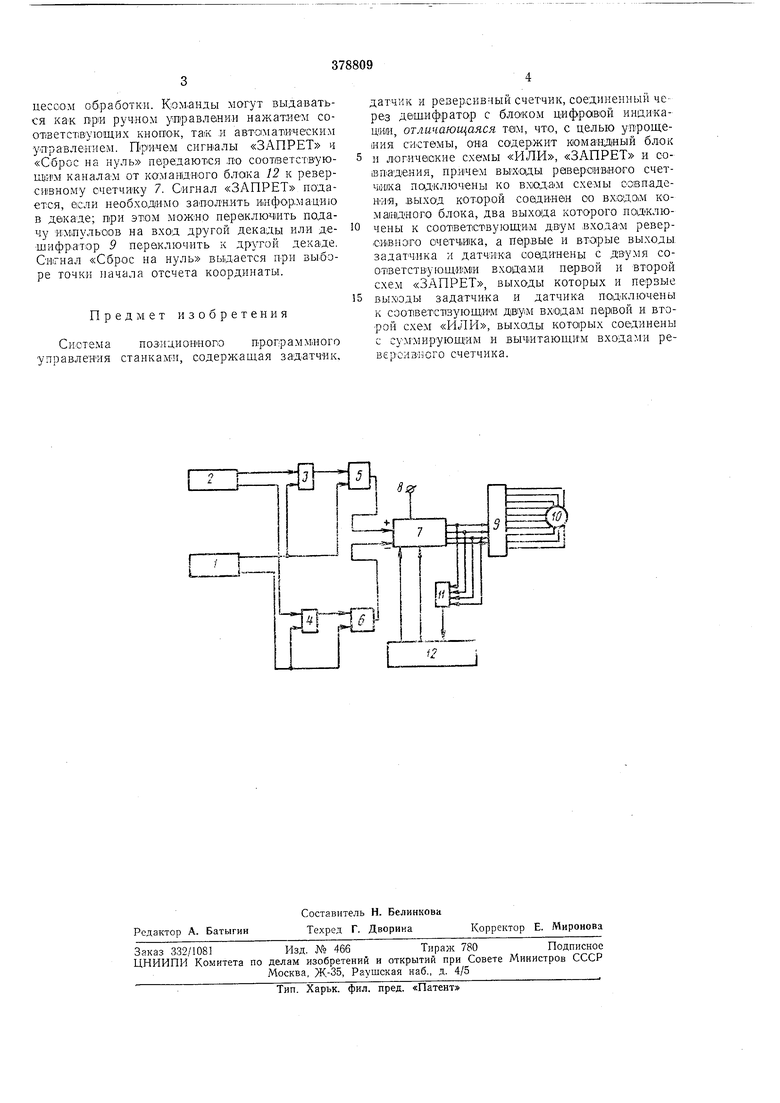
На чертеже П1ред1Ста1влена предлагаемая система позиционного програм много управления станкаМи.
Система со де|р1жит да1ТЧ|И К / и задатчяк 2, связанные с помощью логических схем «ЗАПРЕТ 3 и 4, предназначенных для прерывания цепи прохождения сигнала с задатчика inipH работе датчика, и логических схем «ИЛИ- 5 и 6, предназначенных для разделения сигналов от датчака / и задатчика 2, с реверсивньгм счетчи:ком 7, представляющая собой двоичный счетчик на JO импульсов и имеющим выход 8 в следующую декяду (на чертеже ке показана).
Задатчи1К и датчик вьшол-нены та1ким образом, что оигнал от задатчи1ка 2 И|Дет в цепь .слэжения реше.рсив.ного счетчи1ка 7, а сигнал от датчика / - в цепь вычитания. Таким образом, зада-в требуемую координату при перемендении суппорта, последовательно вычитают из нее значение пройденного пути.
На выходе раверсавного счетчика 7 уста|но1влен дешифратор 9 для преобразования Д1ВОИЧНОГО адада в десятичный для отображения величины требуемого перемещения от те:кущего положения до заданной коэрдшнаты в блоке 10 цифровой И1НДИ1кации. При дост1ижении Т{ребуемого положения, т. е. когда число Импульсов от датчи ка будет равно 4HCvTy имшульсов от за1датчи1ка, сипнал через логичес ую схему 11 совпадения поступит /в командный блок 12 и далее - к пополнительному органу станка (на чертеже не показан).
Командный блок 12 представляет собой устройство, определяющее последовательность
те технологичеоких команд для у П:равления процессом об работки. Команды могут выдаваться как прт ручном управлении нажатие-м соот1ветст1вуюш.их кнопо-к, raiK .и автоматическим Управлением. Причем сигналы «ЗАПРЕТ ч «Сброс на нуль передаются ло соответствующим каналам от комаядного блока 12 к реверсивному счетчику 7. Сигнал «ЗАПРЕТ иодается, если необходимо ЗВ-ПОЛЕИТЬ И|НфОр,маци1о в декаде; этом можно первклю41ить подачу и мпульоов на вход другой декады или дешифратор 9 переключить к другой декаде. «Сброс на нуль выдается ири выборе точки начала отсчета координаты.
Предмет изобретения
Система позиционного программного управления станками, содержащая за;датч-ик.
датчик и резер.сив:1ыи счетчик, соединенный через дещифратор с блоком цифровой инцикации, отличающаяся тем, что, с целью упрощения системы, oHia содер|жит номаядный блок и логичеюкие схемы «ИЛИ, «ЗАПРЕТ и со1ВНад1ения, причем вых-оды раверсивного счетчика подключены ко вх1ода«м схемы совпадения, .выход которой соединен оо вхояо,м кома1ндного блока, два выхода которого подключены к соответствующим двум входал реверCMiBHoiPo счетчика, а .вые и вторые выходы задатчика и датчика соадинены с двумя соот ветствующи М1И входами первой и второй схем «ЗАПРЕТ, выходы которых и первые выходы задатчика и датчика подключены к соот1ветст|вующи1м двум входам первой и второй схем «ИЛИ, выходы которых соединены с суммирующим и вычитающим входами реве ;осИВ150го счетчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для взвешивания подвижных объектов | 1982 |
|
SU1076770A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для контроля, учета и автоматического управления работой сеялки | 1988 |
|
SU1616531A1 |
| Система цифровой индикации для металлорежущих станков с многопозиционными поворотными и револьверными головками | 1972 |
|
SU455337A1 |
| Цифровой многоинтегральный прибор для тензометрических весов | 1982 |
|
SU1030661A1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Автоматическое весоизмерительное устройство | 1981 |
|
SU974137A1 |
| Цифровой синхронизатор | 1978 |
|
SU736267A1 |
| Устройство для компенсации реактивной мощности | 1990 |
|
SU1746463A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
э-да
.L
