Изобретение относится к электротехнике и может быть использовано в устройствах с точной фиксированной установкой механизма в заданной точке.
Известны позиционные электропривода, например рассчитанные на позиционирование в нескольких дискретных точках, фиксируемых контактными датчиками числом позиций до 15-20, и их нельзя применить для позиционирования с высокой точностью, например, до 0,001-0.002 мм.
Этого недостатка лишены позиционные электропривода по а. с. №1246313,1239821. В этих устройствах в качестве датчика положения используются высокоточные кодовые датчики, что существенно повышает точность позиционирования. Наиболее близким по технической сущности к заявляемому решению является позиционный электропривод, который будет рассматриваться в качестве прототипа.
Этот электропривод содержит последовательно соединенные задатчик положения, блок сравнения, цифроаналоговый
преобразователь, операционный усилитель, реле, разомкнутый контакт которого, включен между выходом операционного усилителя и контуром регулирования скорости электродвигателя, выход которого связан с датчиком положения. Замкнутый контакт реле подключен к входу контура регулирования выход блока анализа длительности импульсов, а его вход подключен к выходу датчика положения и к инверсному входу блока сравнения. Принцип работы устройства состоит в том, что в зоне больших рассогласований устройство работает как система подчиненного регулирования положения с цифровым контуром регулирования положения с параболическим законом управления. При малых рассогласованиях включается блок анализа длительности импульсов с датчика положения, в результате чего вырабатывается сигнал на торможение или разгон электродвигателя.
Недостатком данного электропривода является недостаточное быстродействие, обусловленное параболической зависимосл
стыо сигнала на входе контура управления от величины рассогласования по положению, что приводит к тому, что при уменьшении рассогласования по мере его отработки скорость электродвигателя уменьшается и, как следствие, уменьшается средняя скорость отработки, В то же время заложенный принцип анализа длительности импульса младшего разряда датчика положения или паузы между импульсами и сравнения его с эталонным позволяет выработать команду торможения после анализа нескольких им- пульсов младшего разряда датчика положения, что снижает точность системы.
Целью настоящего изобретения является повышение быстродействия при сохранении заданной точности.
Поставленная цель достигается тем, что в позиционный электропривод, содержащий электродвигатель, подключенные к входам первого блока сравнения задатчик положения на п десятичных разрядов с преобразователем кода и датчик положения ин- терференционного типа с реверсивным счетчиком и выходным регистром, а также контур регулирования скорости, выход которого предназначен для подключения к электродвигателю, дополнительно введены первое и второе постоянные запоминающие устройства, первый и второй сумматор, второй и третий блоки сравнения, шесть схем совпадения, при этом контур регулирования скорости электродвигателя выполнен с двумя входами масштабирования, входом реверса и входом останова, блоки сравнения выполнены из п последовательно соединенных компараторов чисел и имеют выходы А В, А В, А В, где А и В - сравниваемые коды задатчика и датчика положения, причем выход А В первого блока сравнения соединен с входом реверса контура регулирования скорости электродвигателя, вычитающими входами первого и второго сумматоров, вторыми входами второй и пятой схем совпадения, выход А В соединен с суммирующими входами первого и второго сумматоров, а также с первыми входами первой и четвертой схем совпадения, а выход А В соединен с входом останова контура регулирования скорости электродвигателя, информационные входы первого и второго сумматоров соединены с выходом преобразователя кода и выходами первого и второго постоянных запоминающих устройств соответственно, а выходы сумматоров - с первыми входами второго и третьего блоков сравнения, вторые входы которых подключены к выходу регистра, выходы А1 В и А2 В второго и третьего блоков сравнения соответственно соединены со вторыми входами первой и четвертой схем совпадения, а выходы А1 В и А2 В соединены с вторыми входами второй и пятой схем совпадения, выходы первой и второй схем совпадения через третью схему совпадения соединены с первым входом масштабирования контура регулирования скорости, а выходы четвертой и пятой схем совпадения аналогично соединены через
шестую схему совпадения со вторым входом . масштабирования, при этом контур регулирования скорости содержит двухтактный широтно-импульсный преобразователь, мостовой реверсивный регулятор, тахогенератор постоянного тока, кинематически связанный с электродвигателем, вычитающее устройство, два источника разнополяр- ного напряжения, три ключа, седьмую и восьмую схемы совпадения, инвертор, делитель напряжения, включающий четыре последовательно включенных резистора, первый из которых одним выводом через контакты первого ключа подключен к выходам источников разнополярного напряжения, а другой вывод указанного резистора образует выход делителя напряжения и подключен к первому входу вычитающего устройства, второй вывод делителя напряжения подключен к общей шине ис.точников разнополярных напряжений, при этом параллельно второму и третьему резисторам делителя напряжения включены замыкающие контакты второго и третьего ключей соответственно, выход тахогенератора подключен ко второму входу вычитающего устройства, выход которого соединен с входом двухтактного широтно-импульсно- го преобразователя, оба выхода которого через первые входы седьмой и восьмой схем
совпадения и их неинвертируемые выходы соединены с входами мостового реверсивного регулятора, выход которого предназначен для подключения электродвигателя, при этом вторые входы седьмой и восьмой схем
совпадения через инвертор соединены с входом останова, первый и второй входы масштабирования соединены с входами управления второго и третьего ключей соответственно, а вход управления первого
ключа соединен с входом реверса.
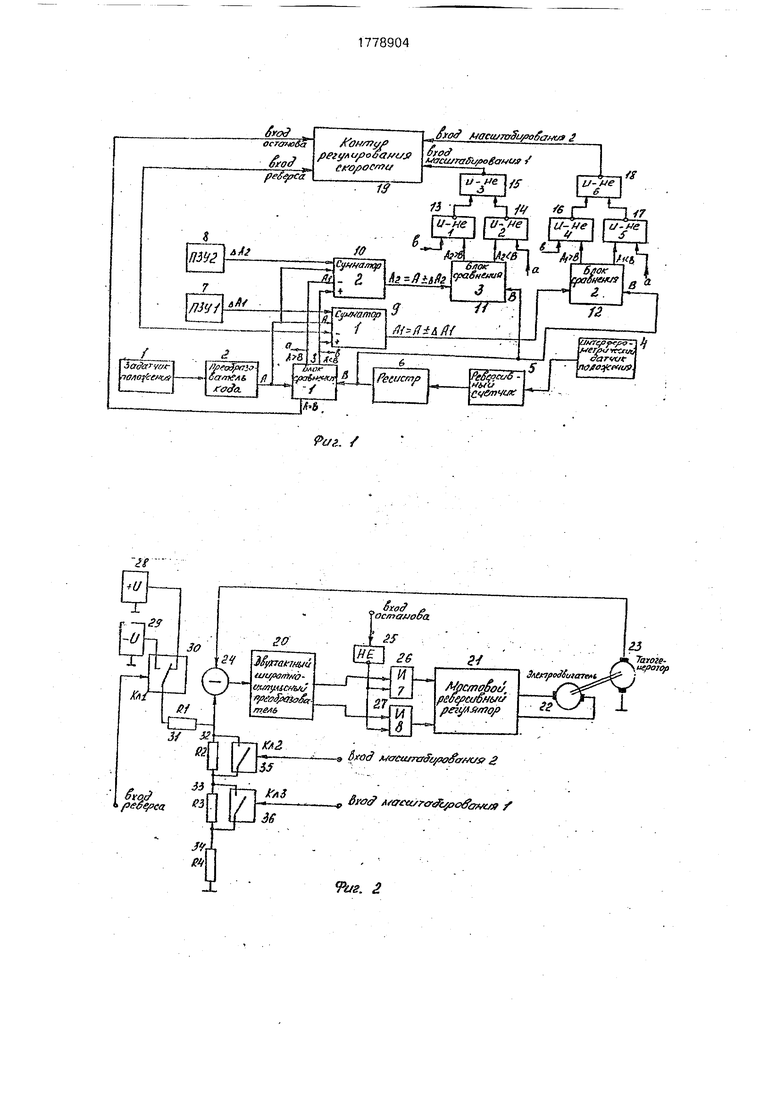
На фиг. 1 представлена блок-схема позиционного электропривода; на фиг. 2 представлена блок-схема конт.ура регулирования скорости электродвигателя,
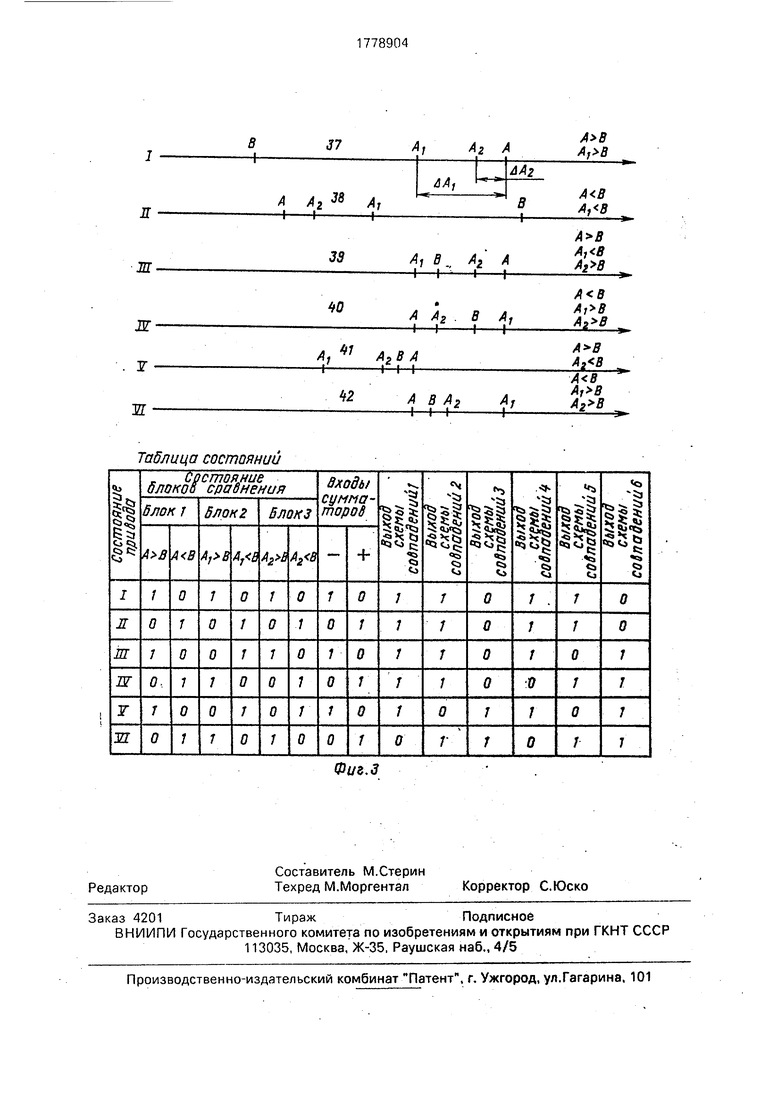
на фиг, 3 изображены диаграммы взаимных положений задатчкка положений и датчика положений для различных состояний, а также приведена таблица состояний логических элементов схемы.
Позиционный электропривод содержит датчик 1 положения на п разрядов десятичного кода, преобразователь кода 2, первый блок сравнения 3, интерферометрический датчик положения 4, реверсивный счетчик 5, регистр б, первое постоянное запоминающее устройство (ПЗУ1) 7, второе постоянное запоминающее устройство 8 (ПЗУ2), первый сумматор 9, второй сумматор 10, третий блок сравнения 11, второй блок срав- нения 12, шесть схем совпадений 13, 14,15, 16. 17, 18, контур регулирования скорости электродвигателя 19, который представлен на фиг. 2 и включает в себя двухтактный широтно-импульсный преобразователь 20, мостовой реверсивный регулятор 21, электродвигатель постоянного тока 22, тахогене- ратор 23, вычитающее устройство 24, инвертор 25, седьмую 26 и восьмую 27 схемы совпадения, источники разнополярного напряжения - положитепьного 28, отрицательного 29, первый ключ 30, делитель напряжения, состоящий из резисторов 31, 32, 33, 34, второй ключ 35, третий ключ 36.
На фиг. 3 обозначены следующие вза- имные состояния задатчика положения 1 (А) и датчика положения 4 (В) с учетом вводимых поправок от ПЗУ1 (ДА1) и ПЗУ2 (АА2).
I Состояние обозначено цифрой 37, II состояние - 38, III состояние - 39, IV состо- яние - 40, V состояние - 41, VI состояние - 42.
Работа электропривода состоит в следующем: если величина заданного перемещения с задатчика 1 больше, чем измеренное датчиком 4 положение привода, то при сравнении кодов с преобразователя кода 2 (число А) и регистра 6 (число В), который отражает состояние реверсивного счетчика 5, подключенного к выходу датчика 4, на выходе А В первого блока сравнения 3 имеется сигнал с уровнем логической 1, а на выходе А В сигнал равен логическому 0. Это состояние соответствует диаграмме 37, На вход реверса контура управления скоро- стью электропривода 19 подается сигнал с уровнем 1, при этом ключ 30 переключает вход делителя напряжения на резисторах R1, R2. R3, R4, (31, 32, 33, 34) к выходу источника отрицательной полярности 29. С выхо- да делителя (резисторы 32, 33, 34) входной сигнал поступает на один из входов вычитающего устройства 24, где сравнивается с сигналом обратной связи, поступающем с тахогенератора 23.
Разностный сигнал поступает на вход двухтактного широтно-импульсного преобразователя 20. В зависимости от знака вход- ного напряжения выходные импульсы появляются лишь на одном из выходов преобразователя, причем длительность их (коэффициент заполнения) пропорциональна величине входного сигнала. С выхода блока 20 импульсный сигнал через схемы 26 и 27 поступает на вход мостового реверсивного регулятора 21, к выходу которого подключен электродвигатель постоянного тока 23. В зависимости от величины и знака входного напряжения двигатель вращается с заданной скоростью в заданном направлении.
В данном случае электродвигатель перемещает исполнительный механизм в направлении уменьшения разницы между числами А и В. При этом перемещение осуществляется с максимальной выбранной для привода скоростью.
С выходов первого блока сравнения на вычитающие входы сумматоров 9 и 10 подается логический уровень 1, а на суммирующие - уровень 0. При этом сумматоры 9 и 10 осуществляют вычитание из числа А чисел ДА1 и ДА2. На выходах сумматоров 9 и 10 будут соответственно числа А1 А - ДА1 и А2 А-АА2.
Число А1 определяет начало предвари-, тельного (грубого) торможения электропривода. Когда электропривод переместит исполнительный механизм в положение, при котором А1 В (диаграмма 39), на выходах второго блока сравнения 12 будут следующие состояния:
выход А1 В - значение О
выход А1 В - значение 1
на входах схемы совпадения 16 будут при этом числа 0 и 0, на выходе 1, на входах схемы совпадения 17 будут числа 1 и 1, на выходе 0, таким образом на выходе схемы совпадения 18 появится уровень 1.
До перехода схемы в состояние III (ди- .аграмма 39), т.е. в предыдущем состоянии, отображенном на диаграмме 37 состояние выхода схемы 18 определялось уровнем О, что видно из таблицы состояний на фиг, 3 для состояния привода 1.
При подаче на второй вход масштабирования блока 19 уровня 1 происходит включение второго ключа 35, который шунтирует резистор 32 (R2), уменьшая тем самым коэффициент передачи делителя R1...R4 таким образом, чтобы выходной сигнал с делителя уменьшить примерно в 10 раз. При этом в 10 раз уменьшается скорость электродвигателя 22, который продолжает перемещать исполнительный механизм в направлении значения А.
Когда привод переместится в положение, при котором В А2 (диаграмма 41) т.е. привод входит в зону точного торможения изменится состояние третьего блока сравнения 11 таким образом, что его выходы б у дут характеризоваться следующими состояниями:
выход А2 В имеет уровень О
выход А2 В имеет уровень 1.
На выходах схемы совпадений 13 имеет числа 0 и 0, на выходе 1.
На входах схемы совпадения 14 имеем числа 1 и 1, а выходе 0.
Таким образом, выход схемы совпаде- ния 15 меняет свое состояние с 0 на 1, в результате, чего на первом входе масштабирования появляется уровень 1. Как видно из таблицы состояний в двух предыдущих ситуациях (диаграммы 39 и 37) на выходе схе- мы совпадения 3 (15) был уровень 0.
При подаче на первый вход масштабирования контура регулирования 19 уровня 1 происходит включение третьего ключа 36, который шунтирует резистор R3 (33), при эгом происходит дополнительное уменьшение коэффициента передачи делителя R1.. R4. Резисторы R1, R2, R3, R4 подобраны таким образом, что при шунтировании резисторов R2 и R3 коэффициент передачи уменьшается примерно в 100 раз по сравнению с первоначальным, то есть скорость двигателя уменьшается также примерно в 100 раз.
При этом электродвигатель с очень ма- ленькой скоростью приближает исполнительный механизм к точке останова. При равенстве чисел А и В на выходе А В первого блока сравнения 3 появится сигнал с уровнем 1. На вход останова контура уп- равлепия 19 подается логическая 1,которая поступает через инвертор 25 на входы схем совпадения 26 и 27. Поскольку на эти входы при А В поступает уровень 0 (за счет инвертирования схемой 25), то схемы 26 и 27 не пропускают сигнал на вход блока 21. т.е. на входах блока 21 будут уровни 0, что приводит к остановке электропривода и его фиксации в этом состоянии независимо от дрейфа усилительных элементов в тракте электропривода. Мостовой реверсивный регулятор 21 выполнен таким образом, что при подаче на его входы сигналов уровнем О осуществляется динамическое торможение элем родвигателя 22 за счет шунтирова- ния его открытыми переходами двух транзисторов мостового реверсивного регулятора 21. Этим самым снижается выбег электродвигателя, что позволяет обеспечить заданную точность отработки програм- мы.
При состояниях привода II, IV, VI (диаграммы 38, 40, 42), когда первоначально В А работа привода аналогична вышеописанному. Отличия состоят в том, что на суммирующем входе сумматоров 9 и 10 будет сигнал с уровнем 1, а на вычитающих входах сигнал будет равен 0, при этом сумматоры будут осуществлять сложение числа А с поправками А А1 и АА2, снимаемых с выходов ПЗУ1 и ПЗУ2. На вход реверса контура 19 подается сигнал, равный 0, ключ 30 возвращается в исходное состояние и вход делителя R1...R4 подключается к выходу источника положительного напряжения 28. Электродвигатель 22 меняет направление вращения.
Состояние элементов схемы в этих режимах последовательно определяются таблицей состояний для положений II, IV, VI.
Позиционным электропривод содержит интегрирующий электропривод с широтно- импульсной модуляцией с исполнительным электродвигателем типа ДПР-52 и тахогене- ратором ТГП-3, обеспечивающим регулирование скорости в диапазоне до 1000. Задатчик положения с преобразователем кода состоит из шести галетных переключателей на 10 положений; что обеспечивает набор чисел от 0 до 600 мм с дискретностью 0,001 мм. В качестве датчика положения используется линейный интерференционный датчик на 600 мм типа ПИЛП; блоки сравнения состоят из шести последовательно соединенных по выходам , А компараторов чисел типа 533СП1, ПЗУ реализовано на микросхемах 133РУ1, а сумматор - на микросхеме 133ИМЗ. Управление электроприводом можно также осуществлять от ЭВМ путем подачи на вход первого блока сравнения профаммируемых значений положений привода. При максимальной скорости установки 10 мм/сек скорость в режиме торможения составляют 1 мм/секи 0,1 мм/сек; при этом выигрыш по времени установки по сравнению с прототипом составляет в среднем 25%.
Формула изобретения
1. Позиционный электропривод, содержащий электродвигатель, подключенные к входам первого блока сравнения задатчик положения на п десятичных разрядов с преобразователем кода и датчик положения интерференционного типа с реверсивным счетчиком и выходным регистром, а также контур регулирования скорости, выход которого предназначен для подключения к электродвигателю, отличающийся тем, что, с целью повышения быстродействия при сохранении заданной точности отработки перемещения, в него дополнительно введены первое и второе постоянные запоминаю- щие устройства, первый и второй сумматор,
второй и третий блоки сравнения, шесть схем совпадения, при этом контур регулирования скорости электродвигателя выполнен с двумя входами масштабирования, входом реверса и входом останова, блоки сравнения выполнены из п последовательно соединенных компараторов чисел и имеют выходы А В, А В, А В, где А и В - сравниваемые коды задатчика и датчика положения, причем выход А В первого блока сравнения соединен с входом реверса контура регулирования скорости электродвигателя, вычитающими входами первого и второго сумматоров, вторыми входами второй и пятой схем совпадения, выход А В соединен с суммирующими входами первого и второго сумматоров, а также с первыми входами первой и четвертой схем совпадения, а выход А В соединен с входом останова контура регулирования скорости электродвигателя, информационные входы первого и второго сумматоров соединены с выходом преобразователя кода и выходами первого и второго постоянных запоминающих устройств соответственно, а выходы сумматоров - с первыми входами второго и третьего блоков сравнения, вторые входы которых подключены к выходу регистра, выходы Ач В и А2 В второго и третьего блоков сравнения соответственно соединены с вторыми входами первой и четвертой схем совпадения, а выходы АЧ В и Аа В соединены с вторыми входами второй и пятой схем совпадения, выходы первой и второй схем совпадения через третью схему совпадения соединены с первым входом машстабирования контура регулирования скорости, а выходы четвертой и пятой схем совпадения аналогично соединены через шестую схему совпадения с вторым входом масштабирования.
2. Позиционный электропривод по п.1, отличающийся тем, что контур регулирования скорости содержит двухтактный широтно-импульсный преобразователь, мостовой реверсивный регулятор, тахогенератор постоянного тока, кинематически связанный с электродвигателем, вычитающее устройство, два источника разнополярного напряжения, три ключа,
седьмую и восьмую схемы совпадения, инвертор, делитель напряжения, включающий четыре последовательно включенных резистора, первый из которых одним выводом через контакты первого ключа подключен к
выходам источников разнополярного напряжения, а другой вывод указанного резистора образует выход делителя напряжения и подключен к первому входу вычитающего устройства, второй вывод делителя напряжения подключен к общей шине источников разнополярных напряжений, при этом параллельно второму и третьему резисторам делителя напряжения включены замыкающие контакты второго и третьего ключей
соответственно, выход тахогенератора под-, ключей ко второму входу вычитающего устройства, выход которого соединен с входом двухтактного широтно-импульсного преобразователя .оба выхода которого через первые входы седьмой и восьмой схем совпадения и их неинвертируемые выходы соединены с входами мостового реверсивного регулятора, выход которого предназначен для подключения электродвигателя, при
этом вторые входы седьмой и восьмой схем совпадения через инвертор соединены с входом останова, первый и второй входы масштабирования соединены с входами управления второго и третьего ключей соответственно, а вход управления первого ключа соединен с входом реверса.
Macи/таЯи/юбания 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью вращения электродвигателя постоянного тока | 1985 |
|
SU1564590A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Цифровой позиционный электропривод | 1978 |
|
SU752712A1 |
| Электропривод с раздельным управлением | 1989 |
|
SU1817220A1 |
| Цифровой позиционный электропривод | 1984 |
|
SU1239821A1 |
| Цифровой позиционный электропривод | 1985 |
|
SU1379928A2 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
Использование: е устройствах с точной фиксированной установкой механизма в за-. данной точке. Сущность: электропривод обеспечивает включение контуров торможения при любых взаимных положениях задающего устройства и реального положения привода, определяемого датчиком положения. В результате этого образуются две зоны для грубого и точного уменьшения скорости, при этом сохраняется высокая средняя скорость отработки перемешивания особенно при больших его значениях. 3 ил,
/
Фиг. 2
| Устройство для управления позиционным электроприводом | 1985 |
|
SU1270857A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
