1
Изобретение относится к области автоматического управления приводами подачи и резания горных машин.
Известны системы автоматического управления приводами горной маплипы, содержаи1.ие приводы и контуры регулирования скоростей подачи и резания, функциональный преобразователь, датчики мгновенной и средней скорости подачи, нагрузки привода резания и пути, измеритель частоты скорости подачи и определитель сопротивляемости угля резанию.
Описываемая система отличается от известных тем, что функциональный преобразователь соединен с выходами датчиков средней скорости нодачи и пути, измерителя частоты скорости подачн и определителя сопротивляемости резанию, ко входу последнего подключены датчики нагрузки привода резания и скорости подачи. Это позволяет снизить динамические нагрузки на приводы машины.
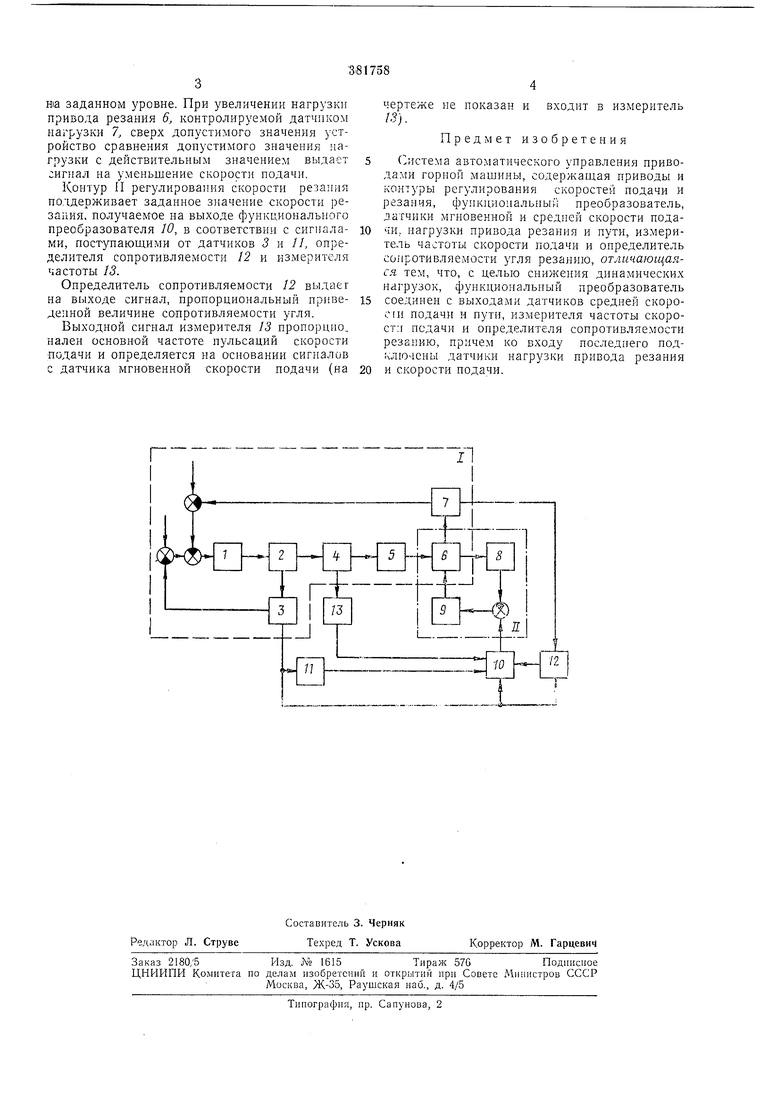
На чертеже приведена структурная схема системы.
В известиом контуре I регулирования скорости подачи горной машины регулятор скорости нодачи / соединен с сервоприводом подачи 2, выход которого связан с датчико.м средией скорости иодачи 3 и приводом подачи 4 исполнительного органа 5 с приводом резания 6. В цепь привода резания 6 включен
датчик нагрузки 7, выход которого связан со входом регулятора подачи /.
В известном контуре II регулирования скорости резаиия привод резания 6 кинематнческн соединен с датчиком скорости резания S, выход которого через элемент сравнения подключен к регулятору скорости резания 9, а упомянутый элемент сравнения соединен также с функциоиальным преобразователем 0.
Датчик средней скорости подачи 3 соединен как с датчнком пути //, определителем сопротивляемости угля резанию 13, так и с функциональным преобразователем 10. Датчик нагрузки 7 соединен также с определителем сопротивляемости 12. Привод подачи 4 связан с измерителем частоты скорости подачи. 13. При этом выходы датчиков 3 и //, олределите:15 сопротивляемости 12 и измерителя часто гы 13 подключены на входы функциональноге преобразователя 0.
Работа системы автоматического управления основана на том, чго для уменьшения динамических нагрузок на приводы скорость резания иоддерживается пропорциональной
Чпстоте пульсаций скорости подачн и сопротизляемости угля резанию.
При этом контур I регулирования скорости подачи ноддерживает скорость подачи машиНь1, а следовательно, и ее производительность
Hia заданном уровне. При увеличении нагрузки привода резания 6, контролируемой датчиком нагрузки 7, сверх допустимого значения устройство сравнения допустимого значения нагрузки с действительным значением выдает сигнал на уменьшение скорости нодачи.
Контур П регулирования скорости резания поддерживает заданное значение скорости резания, получаемое на выходе функционального преобразователя 10, в соответствии с сигналами, поступающими от датчиков 3 и //, определителя сопротивляемости 12 и измерителя частоты 13.
Определитель сопротивляемости 12 выдает на выходе сигнал, пропорциональный призеденной величине сопротивляемости угля.
Выходной сигнал измерителя 13 пропорцио, нален основной частоте пульсаций скорости подачи и определяется на основании сигналов с датчика мгновенной скорости подачи (на
чертеже не показан и входит в измеритель 13.
Предмет изобретения
(истема автоматического управления приводами горной манлины, содержащая приводы и контуры регулирования скоростей подачи и резания, функциональный преобразователь, датчики мгновенной и средней скорости подачи, нагрузки привода резания и пути, измеритель частоты скорости подачи и определитель сопротивляемости угля резанию, отличающаяся тем, что, с целью снижения динамических нагрузок, функциональный преобразователь соединен с выходами датчиков средней скороо и подачи и пути, измерителя частоты скоростл подачи и определителя сопротивляемости резанию, причем ко входу послед1гего подкл101ены датчики нагрузки привода резания и скорости подачи.
Г
Т1
