соответствующими управляющими входами первого управляющего преобразова- теля частоты, отличающий- с я тем, что, с целью повышения надежности и улучшения энергетических показателей, в него введены управляемый коммутационный элемент с двумя переключаемыми входами, логические элементы И и И-НЕ, два пороговых элемента с настраиваемым порогом срабатывания, входы которых связаны с информационным и задающим входами третьего элемента сравнения, а -выходы - с входами логического элемента И-НЕ, выход которого соединен с
5
одним входом логического элемента И, другой вход которого подключен к второму выходу информационного блока, а выход - к управляющему входу управляемого коммутационного элемента, переключаемые входы которого подключены соответственно к прямому и инверсному выходам третьего пропорционально- интегрального регулятора, а выход управляемого коммутационного элемента связан с вторым входом блока суммирования частот и входом делимого блока деления, второй вход блока регулиро- вания подачи соединен с первым выходом блока контроля фазы.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
| Устройство для управления двигателем переменного тока | 1985 |
|
SU1272461A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
Электропривод содержит главный асинхронный двигатель, первый управляемый преобразователь частоты и подающий асинхронный двигатель, второй управляемый преобразователь частоты, информационный блок, вход которого связан с каналом информации о параметрах режима работы главного двигателя, включающим в себя датчики частоты вращения и фазных токов статора, блок координатных преобразователей с двумя опорными входами, блок контроля фазы, три пропорционально-интегральных регулятора, блок суммирования частот, блок деления, задатчик интенсивности и блок преобразования двухфазных сигналов в многофазные. С целью повышения надежности и улучшения энергетических показателей, в него введены управляемый коммутационный элемент с двумя переключаемыми входами, логические элементы И и И - НЕ, два пороговых элемента с настраиваемым порогом срабатывания.
Изобретение относится к электро- технике и может быть применено для электропривода механизмов и машин, имеющих режущую и подающую части, приводимые от автономных электродвигателей, системы управления которыми взаимосвязаны, например буровых установок, угледобывающих и других машин Известен двухдвигательный взаимосвязанный электропривод с контурами регулирования скоростей резания и подачи,, функциональным преобразователем, датчиками мгновенной и средней скорости подачи, нагрузки на валу привода резания и пути, датчик сопротивляемости резанию, при этом функциональный преобразователь соединен с выходами датчиков средней скорости подачи и пути, сопротивляемости резанию, к входу которого подключены выходы датчиков нагрузки на валу привода резания и скорости подачи С.1}- Наиболее близким к предлагаемому по технической сущности и достигаемому результату является двухдвигательный электропривод, содержащий главный асинхронный двигатель, подключенный к выходу первого управляемого преобразователя частоты, и подающий асинхронный двигатель, подключенный к выходу второго управляемого преобразователя частоты, управляющий вход которого подключен к выходу блока регулирования подачи с двумя входами, первый из которых соединен с одним из двух выходов информационного блока, вход которого связан с каналом информации о параметрах режима работы главного двигателя, включающим т себя датчики частоты вращения и
5
0
5
0
S
O
5
фазных токов статора, выходы последнего из которых подключены к соответствующим входам блока преобразования .многофазных сигналов в двухфазные, блок координатных преобразований с двумя опорными входами, первой и второй парами функциональных входов, парой выходов, первым, вторым и третьим выходами, соединенными соответственно с входами блока контроля фазы, имеющего два выхода, три пропорционально-интегральных регулятора с прямыми и инверсными выходами и т элементами сравнения на входах, снабженными информационными и задающими входами, блок суммирования частот, блок деления, задатчик интенсивности и блок преобразования двухфазных-сигналов в многофазные, задающие входы первого, второго и третьего элементов г сравнения связаны соответственно с выходами блока деления, задатчиков тока намагничивания и интенсивности, информационные входы первого, второго и третьего элементов сравнения подключены соответственно к первому и второму выходам блока координатных преобразований и выходу датчика частоты вращения, к которому также подключен первый вход блока суммирования частот, первый и второй опорные входы блока координатных преобразований соединены соответственно с выходом блока суммирования частот и первым выходом блока контроля фазы, второй выход которого подсоединен к входу делителя блока деления, первая пара функциональных входов блока координатных преобразований сое-; динена соответственно с парой выхо5
дон блока преобразования многоЛаз- ньгх сигналов в двухфазные, выходы первого и второго пропорционально- интегральных результатов соединены соответственно с второй парой функциональных входов блока координатных преобразований, указанная пара выходов которого через блок преобразования двухфазных сигналов в много- фазные связана с соответствующими управляющими входами первого управляемого преобразователя частоты C2.J.
Общим недостатком известных технических решений является недостаточная надежность и повышенное энергопотребление особенно в режимах работы на упор и с ударно-стопорным характером нагрузки.
Целью изобретения является повышение надежности и улучшение энергетических показателей.
Поставленная цель достигается тем, что в двухдвигательный электропривод, содержащий главный асинхронный двигатель, подключенный к выходу первого управляемого преобразователя частоты, и подающий асинхронный двигатель, подключенный к выходу второго управляемого преобразователя частоты, управляющий вход которого подключен к выходу блока регулирования подачи с двумя входами, первый из которых соединен с одним из-двух выходов информационного блока, вход которого связан с каналом информации о параметрах режима работы главного двигателя, включающим в себя датчики частоты вращения и фазных токов статора, выходы последнего из которых подключены к соответствующим входам блока преобразования многойазных сигналов в двухфазные, блок координатных преобразований с двумя опорными входами, первый и второй парами функциональных входов, парой выходов первым, вторым и третьим выходами, соединенными соответственно с входами блока контроля фазы, имеющего два выхода, три пропорционально-интегральных регулятора с прямыми и инверсными выходами и элементами сравнения на входах, снабженными информационными и задающими входами, блок суммирования частот, блок деления, задатчик интенсивности и блок преобразования двухфазных сигналов в многофазные, задающие входы первого, второго и третьего элементов сравнения связа15
770586
ны соответственно с выходами блока деления, задатчиков тока намагничивания и интенсивности, информационные входы первого, второго и третьего элементов сравнения подключены соответственно к первому и второму выходам блока координатных преобразований и выходу датчика частоты вращеJQ ния, к которому также подключен первый вход блока суммирования частот, первый и второй опорные входы блока координатных преобразований соединены соответственно с выходом блока суммирования частот и первым выходом блока контроля фазы, второй выход которого подсоединен к входу делителя блока деления., первая пара функциональных входов блока коорди20 натных преобразований соединена соот- ветствено с парой выходов блока преобразования многофазных сигналов в двухфазные, выходы первого и второго пропорционально-интегральных регуля25 торов соединены соответственно с второй парой Функциональных входов блока координатных преобразований, указанная пара выходов которого через блок преобразования двухфазных сигна3Q лов в многофазные связана с соответствующими управляющими входами первого управляемого преобразователя частоты, введены управляемый коммутационный элемент с двумя переключаемыми входами, логические элементы
И и И-НЕ, два пороговых элемента с настраиваемым порогом срабатывания, входы которых связаны с информационным и задающим входами третьего элемента сравнения, а выходы - с входами логического элемента И-НЕ, выход которого соединен с одним входом логического элемента И, другой вход которого подключен к второму выходу информационного блока, а выход - к управляющему входу управляемого коммутационного элемента, переключаемые входы которого подключены соответственно к прямому и инверсному выходам
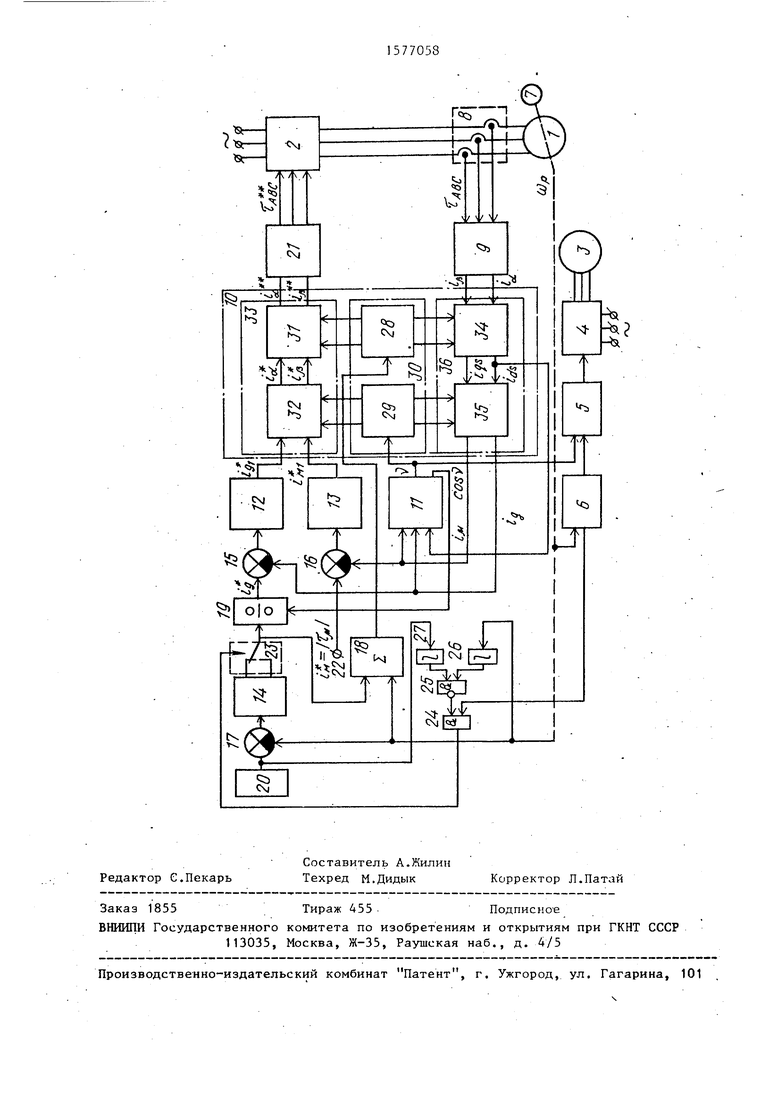
г« третьего пропорционально-интегрального регулятора, а выхол управляемого коммутационного элемента связан с вторым входом блока суммирования частот и входом делимого блока деления. На чертеже приведена функциональная схема двухдвигателыюго электро привода.
Двухдвигательный электропривод содержит главный асинхронный двигатель
40
45
5
10
15
20
25
7 1577058
1, подключенный к выходу первого yn-i авляемого преобразователя 2 частоты подающий асинхронный двигатель 3, одключенный к выходу второго управяемого преобразователя 4 частоты, правляющий вход которого подключен выходу блока 5 регулирования подачи двумя входами, первый из которых оединен с одним из двух выходов инормационного блока 6, вход которого вязан с каналом информации о параетрах режима работы главного двигаеля 1, включающим в себя датчик 7 астоты вращения и датчик 8 фазных оков статора, выходы последнего из оторых подключены к соответствующим ходам блока 9 преобразования многоазных сигналов в двухфазные, блок 10 координатных преобразований с-двуя опорными входами, первой и второй арами функциональных входов парой ыходов, первым, вторым и третьим ыходами, соединенными соответственно с входами блока 11 контроля фазы, меющего два выхода, три блока 12-14 регуляторов пропорционально-интегрального типа с прямыми и инверсными выходами и элементами 15-17 сравнения на входах, снабженными информационны- JQ ми и задающими входами, блок 18 суммирования частот, блок 19 деления, задатчик 20 интенсивности, блок 21 преобразования двухфазных сигналов в многофазные, задающие входы первого 15, второго 16 и третьего 17 элементов сравнения связаны соответственно с выходами блока 19 деления, задатчика 22 тока намагничивания и задатчика 20 интенсивности, информационные входы первого, второго и третьего элементов сравнения подключены соответственно к первому и второму выходам блока 10 координатных преобразований и выходу датчика 7 частоты вращения главного асинхронного двигателя 1, к которому также . подключен первый вход блока 18 суммирования частот, первый и второй опорные входы блока 10 координатных преобразований соединены соответственно с выходом блока 18 суммирования частот и первым выходом блока 11 контроля фазы, второй выход которого подсоединен к входу делителя блока 19 деления, первая пара функциональных входов блока 10 координатных преобразований соединена соответственно с парой выходов блока 9 преобразова35
40
Л5
50
55
ни н п т р к у бл си о п 2 ны ми и ро ем ко за тр ал га вы со ме не ме кл но эл ще но ды но тр го го за ва ка р вы
н о в р в д ф и
0
5
0
5
7058
Q 5
0
5
0
5
8
ния многофазных сигналов в двухфазные, выходы первого 12 и второго 13 пропорционально -интегральных регуляторов соединены соответственно с второй парой функциональных входов блока 10 координатных преобразований, указанная пара выходов которого через блок 21 преобразования двухфазных сигналов в многофазные связана с соответствующими управляющими входами первого управляемого преобразователя 2 частоты, управляемый коммутационный элемент 23 с двумя переключаемыми входами, логические элементы 24 и 25 соответственно И и И-НЕ, два пороговых элемента 26 и 27 с настраиваемым порогом срабатывания, входы которых связаны с информационным и задающим входами соответственно третьего элемента 17 сравнения реальной частоты вращения главного двигателя 1 и ее заданного значения, выходы пороговых элементов 26 и 27 соединены с входами логического элемента И-НЕ 25, выход которого соединен с одним входом логического элемента И 24, другой вход которого подключен к второму выходу информационного блока 6, а выход логического элемента И 24 подсоединен к управляющему входу управляемого коммутационного элемента 23, переключаемые входы которого подключены соответственно к прямому и инверсному выходам третьего пропорционально-интегрального регулятора 14, а выход управляемого коммутационного элемента 23 связан с вторым входом блока 18 суммирования частот и с входом делимого блока 19 деления, второй вход блока 5 регулирования подачи соединен с первым выходом блока 11 контроля фазы.
Блок 10 координатных преобразова-. ний содержит два генератора 28 и 29 опорных синусоидальных колебаний, входы которых образуют первый и второй опорные входы блока 10 соответственно, генераторы 28 и 29 имеют по две пары выходов и образуют блок 30 формирования опорных синусоидальных колебаний, первый и второй блоки 31 и 32 прямого преобразования коорди- н-ат образуют блок 33 координатных преобразований управляющих сигналов, блоки 34 и 35 обратного преобразования координат образуют блок 36 координатных преобразований информацией-1
91
ньтх сигналов. Два входа блока 34 образуют первую пару входов блока 10, вторая пара входов которого образована двумя входами блока 32, с двумя выходами которого соединены соответственно два входа блока 31, два выхода которого образуют пару выходов блока 10, первый и второй выходы которого образованы выходами блока 35 соответственно по активной и реактивной составляющим, входы которого соединены с двумя выходами блока 34, выход которого по активной составляющей образует третий выход блока 10. Опорные входы блоков 32 и 35 соединены с соответствующими парами выходов генератора 29, а опорные входы блоков 31 и 34 соединены с соответствующими парами выходов генератора 28 опорных синусоидальных колебаний. Силовые входы управляемых преобразователей частоты снабжены выводами для подключения к источнику электроэнергии, например к сети промыт- ленной частоты.
Двухдвигательный электропривод функционирует следующим образом.
Регулируют скорость вращения и момент главного электродвигателя 1 в соответствии с требованием технологического процесса, например очистных работ в лаве угольной шахты. При этом измеряют датчиком 8 его фаз, л ,
ные токи 1/,, ai., a ic, преобразуют их в систему эквивалентных двухфазных сигналов i, ji п блоке 9. Чре- |образуют полученные сигналы из неподвижной во вращающуюся ортогональную систему координат путем воздействия на них опорными синусоидальными колебаниями с выходов генератора 28 в блоке 34 обратного преобразования координат, а затем в блоке 35 опорными синусоидальными колебаниями с выходов генератора 29, что в результате эквивалентно воздействию суммарного опорного сигнала
i cos( } + ); j sin( ))dt).
Аргумент J wdt вычисляется (формируется) по возмущению скорости при изменении нагрузки на валу главного двигателя.
Аргумент вычисляется в блоке 11 по возмущению составляющих тока статора при изменении нагрузки на в.а лу, величина его пропорциональна фа58
10
0
5
0
5
о
зовому сдвигу вектора тока статора по отношению к вектору его задания.
Таким образом, суммарный аргумент несет в себе информацию об электромагнитной и механической реакциях электродвигателя 1 при изменении нагрузки на палу, в результате чего осуществляется целенаправленное воздействие на фазу тока статора, формирующее его формирование по наперед заданному закону. В блоках 12 и 13 формируют задающие сигналы активной и реактивной составляющих тока статора по отклонениям на выходе элементов 15 и 16 сравнения. Сигналы с выходов пропорционально-интегральных регуляторов 12 и 13 подвергают двойному координатному преобразованию суммарным аргументом ( +Jwdt) в блоке 33, в результате чего получают ji , которые затем в блоке 21 преобразуют п трехфазное управляющее воздействие , подаваемое на соответствующие управляющие входы первого управляемого преобразователя 2 частоты питания главного двигателя.i
Аргумент ) вычисляют, например, из уравнения
v arcsin (i cos V
о
0
5
0
5
где -J - искомый угол поворотасистемы координат (сигнал на выходеблока 1 1 );
1Л, i - проекции вектора токастаQ М
торт соответственно на действительную и мнимую оси ориентированной системы координат (сигналы на выходах Ьлока 35);
ijs - проекция вектора тока статора на действительную ось неориентированной системы координат (сигнал на первом выходе блока 34).
Сигнал -0 подают на вход генератора 29 и на управляющий вход блока 5, в котором формируют управляющие воздействия, подаваемые на тиристор- ный преобразователь 4 частоты электродвигателя 3 подачи. .При этом используется необходимая информация о переменных режима из блока 6.
Скорость полачи регулируют в функции нагрузки главного лектродвига- теля, информационным сигналом о величине которой является -J , так как на холостом ходу ) 0, ас ростом нагрузки на напу он соответственно увеличивается и запоминается
на первом выходе блока 11. Обратное преобразование координат в блоках 34 и 35 производится в соответствии с выражениями
з
ots
Цй i cosCjwdt)
+ iftsin(J Wdt) J + j -igj sin(Jtodt) +
i
ft cos + Ji
(Jwdt), (i + i
j(
-i eintH- iqs
45
cos V ) ,
sin 1 ) +
а прямое преобразование координат в блоках 31 и 32 производится в соответствии с выражениями
. .«-« J
|
(i cos -g
iЈ sin V) +
+ j (i sin V + ilces J),
i +
jiЈ i cos( Wdt) - i
M1
sin( JcOdt)j+ j ) +
(Jwdt),
i
Mi
i
cos
г
де ,
i
1o(
If
}1 ХМ1
ортогональные составляющие тока статора и его задания в системе координат, вращающейся с частотой, определяемой угловым агру- ментом
ортогональные составляющие тока статора и его задания в системе координат, вращающейся с частотой, определяемой суммарным угловым аргументом (Jtodt + V).
0
5
0
5
0
5
Для обеспечения работы электропривода при возникновении стопорных возмущений на валу, вплоть до полного заклинивания рабочего органа, главным образом для защиты трансмиссии, двигатель резания при наличии подаю- щего воздействия переводится скачком в генераторный режим путем изменения знака сигналов задания активной сос тавляющей тока статора и абсолютного скольжения. Степень стопорения определяется по сигнапу с датчика скоцос- ти ротора соответствующей настройкой порогового элемента 26 по сравнению с настройкой порогового элемента 27 на изменение задания скорости ротора с выхода блока 20. При просадке на входе блока 26 сигнала на величину, определяемую указанной настройкой , исчезает сигнал на его выходе, что приводит к перебросу элемента 23 в состояние наличия выходного сигнала, подаваемого на один из входов элемента И 24, на другой его вход поступает сигнал наличия подающего воздействия на рабочий орган, что приводит к появлению сигнала на выходе элемента 24, а значит, и на управляющем входе коммутационного элемента 23, который перебрасывается в положение, соответствующее изменению знака на выходе блока 23 и задающем входе элемента 15. Это означает, что двигатель переведен в генераторный режим.
Таким образом, применение данного изобретения позволяет повысить надежность двухдвигательного электропривода благодаря упрощению его информационной части, а также введению элементов, обеспечивающих перевод главного двигателя в генераторный рекуперативный режим при возникнов е- нии стопорения его вала, что позволяет попутно улучшить энергетические показатели за счет утилизации энергии, - стопорепия.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДАМИ | 0 |
|
SU381758A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3473376/24-07, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
