«
Изобретение относится к автс «атике и вычислительной технике и предназначено для использования в системах числового програ «лного управления фрезериымк стаикамв.
По основному авт.св. в 538345 известно устройство для адаптиввогю} программного управления станксмм, Ь6держащее йуль-оргаа, датчик вибрации, датчик силы резания и эадатчшс силы резания, соединенный с блокст сравнения, подключенным через последовательно соединеннью блок регулирования подачи, блок задания скорости .и блок задания программы к приводу подачи, преобразователь частоты в Напряжение, вход и выход которого подключены соответственно к выходу блока задания скорости я входу блока регулирования подачи, а датчики вибрсщии и силы резания через нуль-орган соединены со входами задатчйка силы резания и блока регулирования подачи 1 .
Однако это устройство не обладает повышенной точностью работы в установившихся режимах и в дингинике из-за большого времени переходного процесса и колебаний при скачкообразном изменении силы резания.
Целью изобретения является повышение точности устройства.
Поставленная цель достигается тем, что устройство содержит измеритель частоты вращения шпинделя и блок коррекции, причем, выход блока сравнения подключен ко входу блока регулирования подачи через блок коррекции, управляющий вход которого соединен с выходом измерителя частоты вращения шпинделя.
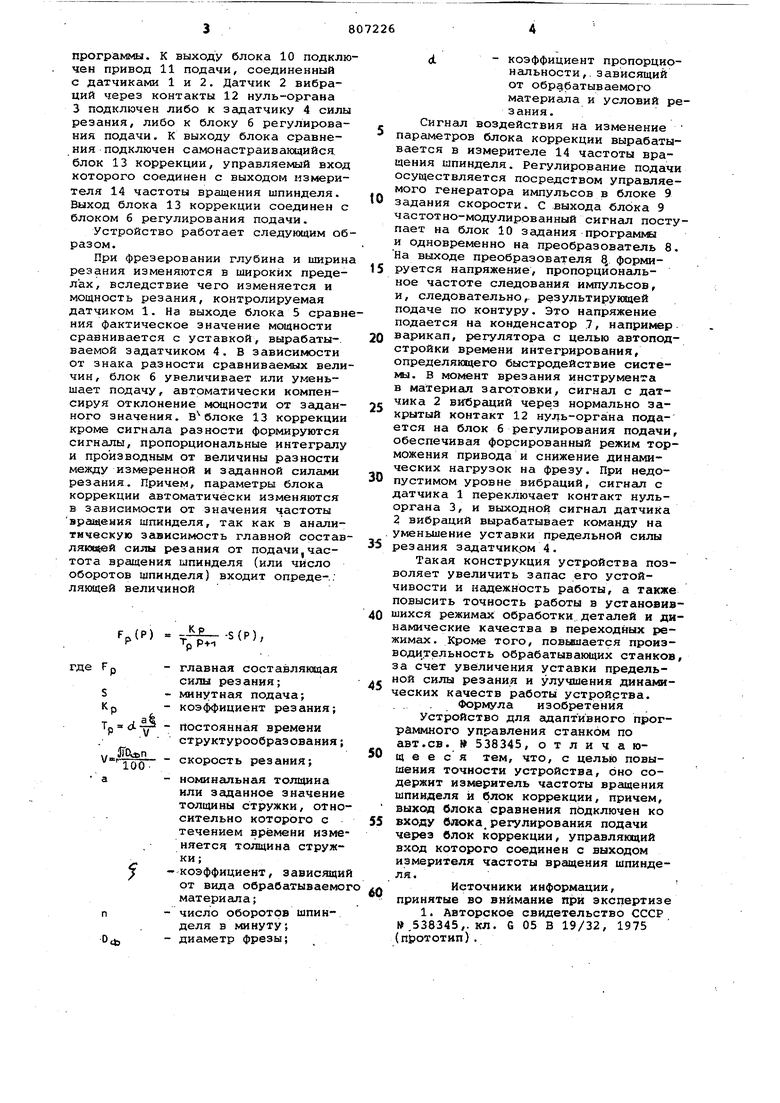
На чертеже показана функциональная схема устройства.
Устройство содержит датчик 1 силы резания и датчик 2 вибраций, выходы KOToi dx соединены с нуль-органом 3. К выходу нуль-органа подключены задатчик 4 силы резания и блок 5 сравнениями блок 6 регулирования подачи с интегрирукяаим конденсатором 7. Выход задатчика 4 силы резания соединен также с одним из входов блока 5 сравнения.К конденсатору блока 6 регулирования подачи подключен выход преобразователя 8 частоты в напряжение. Выход блока 6 соединен со входом блока 9 задания скорости. Вход преобразователя 8 соединен с выходом блока 9 задания скорости и входом блока 10 задания программы, к выходу блока 10 подклю чен привод 11 подачи, соединенный с датчиками 1 и 2. Датчик 2 вибраций через контакты 12 нуль-органа 3 подключен либо к задатчику 4 силы резания, либо к блоку б регулирования подачи, К выходу блока сравнения подключен самонастраивакадийся. блок 13 коррекции, управляемый вход которого соединен с выходом измерителя 14 частоты вращения шпинделя. Выход блока 13 коррекции соединен с блоком б регулирования подачи. Устройство работает следующим об разом. При фрезеровании глубина и ширин резания изменяются в широких пределах, вследствие чего изменяется и мощность резания, контролируемая датчиком 1. На выходе блока 5 сравн ния фактическое значение мощности сравнивается с уставкой, вырабаты-. ваемой задатчиком 4. В зависимости от знака разности сравниваемых вели чин, блок 6 увеличивает или уменьшает подачу, автоматически компенсируя отклонение мсмцности от заданного значения, в блоке 13 коррекции кроме сигнала разности формируются сигналы, пропорциональные интегралу и производным от величины разности между измеренной и заданной силами резания. Причем, параметры блока коррекции автоматически изменяются в зависимости от значения частоты враадения шпинделя, так как в аналитическую зависимость главной соста силы р1езания от подачи,частота вращения шпинделя (или число оборотов шпинделя) входит опреде-. ляющей величиной где FI главная составляквдая силы резания; минутная подача; коэффициент резания; постоянная времени структурообразования -скорость резания; -номинсшьная тол11|ина или заданное значени толщины стружки, отн сительно которого с течением времени изм няется толщина струж ки; -коэффициент, 3 ависящ от вида обрабатываем материала; -число оборотов шпинделя в минуту; -диаметр фрезы; oL - коэффициент пропорциональности,, зависящий от обрабатываемого материала и условий резания. Сигнал воздействия на изменение параметров блока коррекции вырабатывается в измерителе 14 частоты вращения шпинделя. Регулирование подачи осуществляется посредством управляемого генератора импульсов в блоке 9 задания скорости. С выхода блока 9 частотно-модулированный сигнал поступает на блок 10 задания программы и одновременно на преобразователь 8. На выходе преобразователя формируется напряжение, пропорциональное частоте следования импульсов, и, следовательно, результируквдей подаче по контуру. Это напряжение подается на конденсатор 7, например. варикап, регулятора с целью автоподстройки времени интегрирования, определяющего быстродействие системл. В момент врезания инструмента в материал заготовки, сигнал с датчика 2 вибраций через нормально закрытый контакт 12 нуль-орга:на подается на блок 6 регулирования подачи, обеспечивая форсированный режим торможения привода и снижение динамических нагрузок на фрезу. При недопустимом уровне вибраций, сигнал с датчика 1 переключает контакт нульоргана 3, и выходной сигнал датчика 2 вибраций вырабатывает команду на уменьшение уставки предельной силы резания задатчикрм 4. Такая конструкция устройства позволяет увеличить запас его устойчивости и надежность работы, а также повысить точность работы в установившихся режимах обработки деталей и динамические качества в переходных режимах. Кроме того, повьшается производительность обрабатывающих станков, за счет увеличения уставки предельной силы резания и улучшения динамических качеств работы устройства. Формула изобретения Устройство для адаптивного программного управления станком по авт.св. 538345, отличающееся тем, что, с цельк) повышения точности устройства, оно содержит измеритель частоты вращения шпинделя и блок коррекции, причем, выход блока сравнения подключен ко входу , регулирования подачи через блок коррекции, управляющий вход которого соединен с выходом измерителя частоты вращения шпинделя. Источники информсщии, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №,538345,. КЛ. G 05 В 19/32, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Устройство для управления станком с выдвижным шпинделем | 1982 |
|
SU1108393A1 |
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Устройство для адаптивного программного управления станком | 1975 |
|
SU538345A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для адаптивного программного управления станком | 1977 |
|
SU622056A2 |

