Изобретение относится к геофизическому приборостроению, в частности к приборам, исиользуемым для измерения магнитного поля Земли Б движении.
Известны подобпые устройства, в которых использован датчик протонного магнитометра с системой токовых колец, л естко связанных с системой координат носителя. Онределение компонент производится счетно-решающим устройством, в которое вводятся зпачеппя компонент магннтпого поля и поправки на углы наклона, постояиио измеряемые гиросистемами носителя.
Медостатком такой с.хемы построения прибора, особеппо в условиях букспруе.мой гондолы, является необходимость дополнительного размещения приборов, измеряющих параметры движеппя гопдолы, а следовательно, увеличения сигнальных жил кабель-буксира и снижения точности измерений магнитного поля за счет собственной неременной на.магпиченности элементов гироприборов.
Цель изобретения - измерение абсолютных значеннй компонент геомагнитного поля кваптовыми датчиками полного вектора магнитного поля, увеличение точности измереннй и упрощепие конст1рукции.
Это достигается тем, что стабнлизируется колечная система, выполненная в виде маятпиковой усечеппой сферы с проточками для
токовых колеи п двумя успокоителями в впде V-образпых трубок с жидкостью но краям сферы, а датчик с системой ориентации устанавливается в нанравлеиП агнитиого лгеридиана.
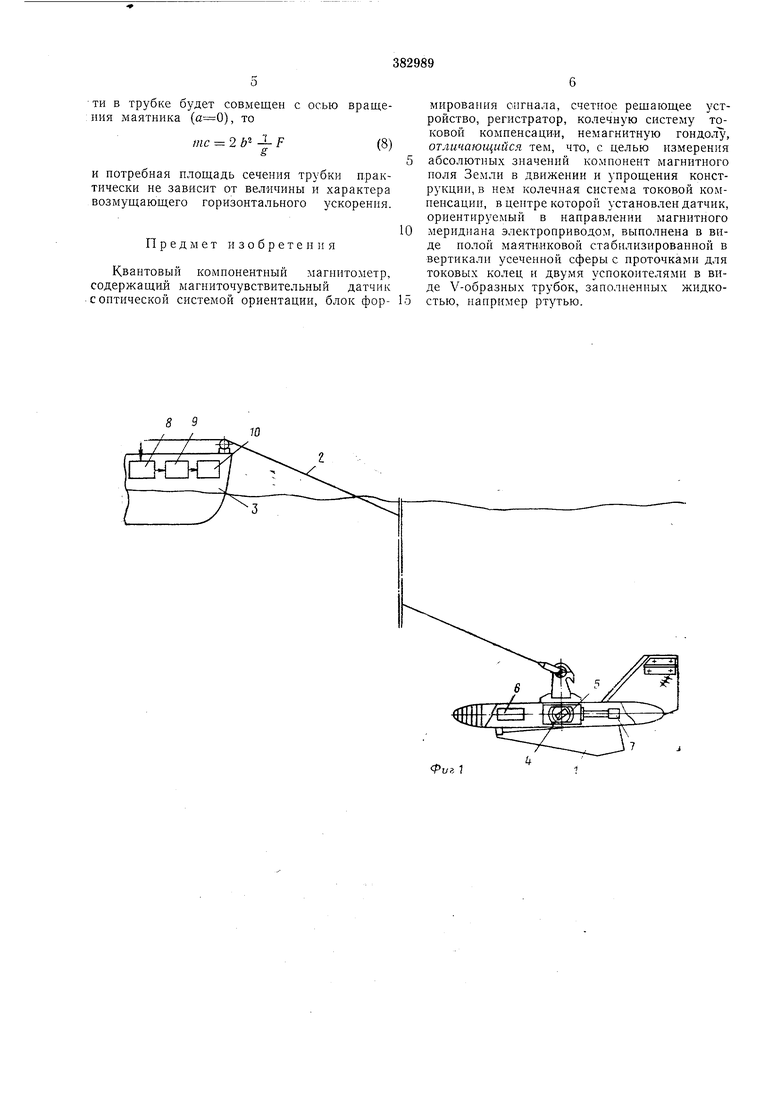
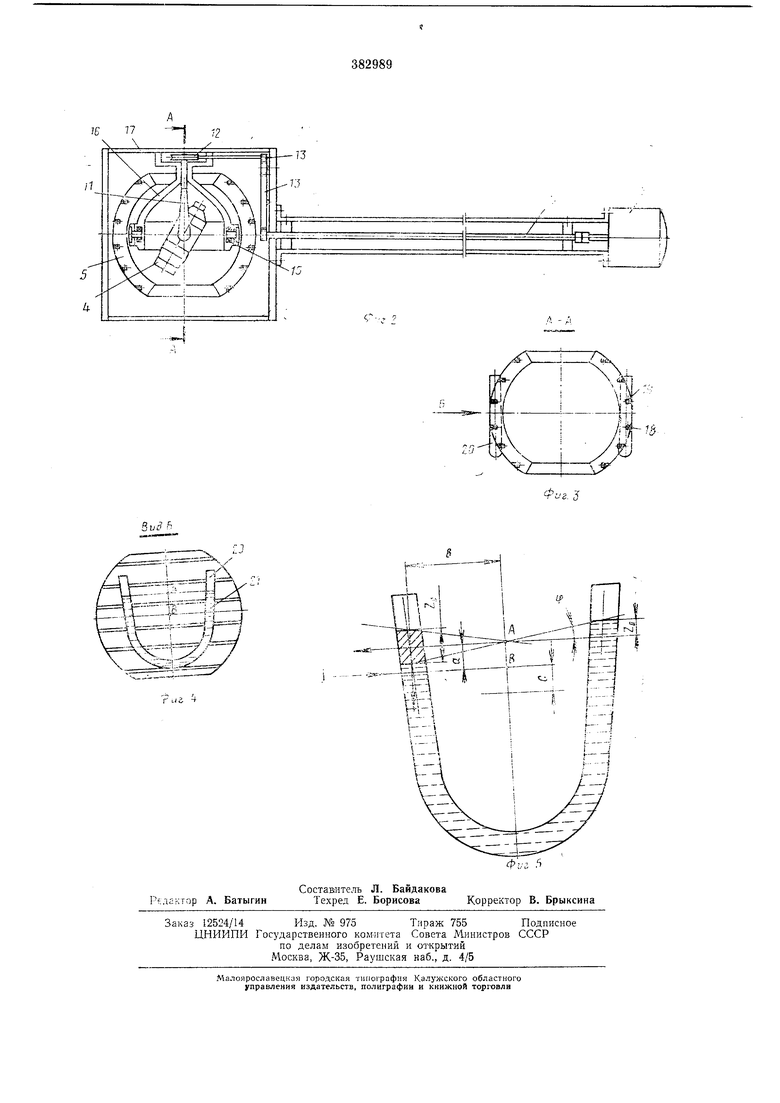
На фнг. 1 представлена блок-схема предлагаемого квантового компонентного магнитометра; )ia фиг. 2 - вертикальный разрез вдоль цродольной оси гондолы; па фиг. 3 - разрез колечной снстемы по .4-А на фиг. 2; на фнг. 4 показано .место устаиовкн ртутных успокоителей; па фиг. 5 - схема работы ртутных успокоителей.
В немагнитной 1 (см. фиг. 1), буксируемой на кабель-тросе 2 за корабле: 1 3, расположен квантовьп магпнточувствительный датчик 4 с колечной системой 5 токовой компенсацин. В носовой части гондолы расположен блок 6 формирования снгиала. Датчик 4 устанавливается по направлению магиитпого мерлдиапа электродвпгателем 7 системы полуавтоматической ориептации датчика 8. Электродвигатель 7 расположеи на расстоянии, исключающем влияние собственной намагниченности на показания магпитометра. Счетно-рещающее устройство 9 и регистратор 10 расиоложены иа корабле 3.
Датчик 4 магнитометра (см. фиг. 2), расположенный в цеитре колечной снстемы 5 токовой компенсации, закреплеп на кропштей) о
ие //, 1меющсм вертакалькую ось вращения, связанную посредством червячной передачи 12, зубчатых колес 13 и вала J4 с электродвигателем 7 системы ориептацнн датчика в направлении вектора магиитиого поля. Колечиая система 5 токовой компенсации выиолнена из немагнитного материала в виде иолой усеченной сферы и закреплена с помощью карданового кольиа /5, кроищтейна 16 и немагнитных нодщииников на корпусе 17. На наружной поверхностн сферы имеются выточки 18 (см. фиг. 3), которые заполнены проводамн 19 системы 5 колечной токовой компенсации. Успокоители 20, выполненные в виде V-образных трубок (см. фиг. 3 и 4), закреплены на наружной поверхности сферы в вертикальной плоскости параллельной продольной осп гондолы и занолнены жидкостью 21, например ртутью (см. фиг. 4).
При измерений абсолютных значений ко.мпонент геомагнитного ноля используются метод наложения п Л1етод компенсаппи. По первому методу вычисляются компоненты по следующим формулам:
.-V.
У (Гг,--2П
V
где:
j-j суммарное значение напряженности магнитного поля при дополнительном поле колец в направлении вертикальной компоненты; - суммарное значен1ие наиряженности магнитного поля при дополнительном поле колец в направлении, противоположном вертикальной компоненте;Т - значение вектора магннтного ноля
Земли.
По второму методу одна компонента компенсируется магнитным полем, равным по величине и обратным по знаку, а вторая измеряется датчиком.
В датчике магнитометра ири обесточенной колечнойсистеме вырабатывается сигнал, пропорциональный напряженности полного вектора геомагнитного поля. Для определения компонент магннтного ноля Земли колечной снстемой задается реверсивное дополнительное ноле в вертикальном направлении, н датчик вырабатывает снгнал, пропорциональный сумме векторов дополнительного ноля. Для определения компонент магнитного поля Земли колечной системой задается реверсивпое дополнительное поле в вертикальном направлении, и датчик вырабатывает сигнал, нропорциональный сумме векторов дополнительного поля и магнитного поля Землп. Эти сгиналы после соответствующего формирования и усплення по кабель-буксиру передаются в счетно-рещающее
устройство и регнстрирующую систему. Гондола, буксируемая за кораблем, испытывает продольные ускорения, которые воздействуют на маятниковую систему токовой KOVTненсации и тем самым отклоняют ось колечпой систе.мы от истинной вертикали на углы, нропорциопальные величине продольных ускорений. Для уменьшения этих углов отклонения оси колечиой системы от вертикали, а следовательно, для увеличения точностн измерения компонент, разработаны специальные успокоители в внде У-образнь х трубок, заполненных ртутью. Принцип действия успокоителей состоит в следующем. Г1)сть на колечпую систему, представляющую собой маятпик, действует горизонтальное ускорение, величина которого / (см. фиг. 5). Собстве1П1ый нериод этого маятника
/
(1;
с колечной снстемой связаи жидкостный маятннк в виде V-образной трубки, заполненной ртутью (см. фиг. 5). Собственный период жндкостного маятпика
. ;
(2) 2.(точка А-уровень ртутп в трубках; точка В - центр подвески колечиой системы).
Причем
Т . Г .
(3)
Отпосительно осп подвески возникает возмущающий момент, величина которого
.1,. - fnjC .
(4)
Одновременно лнния поверхности ртути в V-образной трубке переходит в положение кажугцегося горизонта, в результате чего возникает компенсирующий момент, величиEia которого
Жко™.-2654- Т-К2а6- Рт.
(5)
Для выполнения условия динамического равновесня необходимо, чтобы
Мком::. ,
Л|
пли
2 6- (7)
F L2a(b
Г.
ъ
Выполнение условия (6) может быть достигиуто подбором сечения трубки F для заданного диапазона ускорений, удовлетворяющего уравнению (7). Если уровень ртути в трубке будет совмещен с осью вращения маятника (), то тс 2Ь F g и потребная площадь сечения трубки практически не зависит от величины и характера возмущающего горизонтального ускорения. Предмет изобретения Квантовый компонентный магнитометр, содержащий магниточувствительный датчик с оптической системой ориентации, блок формирования сигнала, счетное рещающее устройство, регистратор, колечную систему токовой компенсации, немагнитную гондол , отличающийся тем, что, с целью измерения абсолютных значений компонент магнитного поля Земли в движении и упрощения конструкции, в нем колечная система токовой компенсации, в центре которой установлен датчик, ориентируемый в направлении магнитного меридиана электроприводом, выполнена в виде полой маятниковой стабилизированной в вертикали усеченной сферы с проточками для токовых колец и двумя успокоителями в виде V-образных трубок, заполненных жидкостью, например ртутью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Квантовый компонентный магнито-METP | 1979 |
|
SU819778A1 |
| Компонентный магнитометр | 1984 |
|
SU1226386A2 |
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| Ядерно-магнитометрическое устройство | 1977 |
|
SU661475A1 |
| Квантовая магнитометрическая система | 1977 |
|
SU739453A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| АВТОМАТИЧЕСКИЙ КВАРЦЕВЫЙ ВАРИОМЕТР | 1973 |
|
SU409175A1 |
| Способ магнитных измерений и устройство для его осуществления | 1991 |
|
SU1824612A1 |
| Датчик ядерного магнитометра для морских измерений | 1982 |
|
SU1122917A1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
Фиг 1
