Группа изобретений относится к области определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта с использованием результатов измерений компонент индукции магнитного поля объекта в условиях отсутствия экранирования геомагнитного поля.
Известен способ определения магнитного момента объекта [п. РФ №2375721 МПК G01R 33/12, опубликован 31.03.2008 г.], заключающийся в измерении каждой компоненты магнитного момента объекта, соответственно, тремя парами предварительно эталонированных по магнитному моменту измерителей магнитного поля. Измерители каждой пары устанавливаются на соответствующем размеру объекта известном расстоянии вдоль направления соответствующей исследуемой компоненты и на противоположных сторонах от объекта. По результатам одновременно проведенных измерений магнитного поля объекта расчетным методом находятся компоненты магнитного момента объекта и местоположение источника магнитного момента.
Однако при определении дипольного магнитного момента слабо намагниченного объекта, в состав которого входят устройства с ферромагнитными элементами, в условиях неэкранированного геомагнитного поля проявляются:
- ограниченность данного метода, определяющего положение единичного источника магнитного момента, находящегося в пределах объема объекта;
- низкая чувствительность метода, определяемая регистрацией величины дипольного момента со значением от единиц до сотен Ам2;
- отсутствие учета текущего значения и изменения геомагнитного поля удаленным магнитометром, расположенным на расстоянии от объекта, при котором отсутствует влияние на его магнитного поля исследуемого объекта.
Известен способ измерения магнитного момента крупногабаритного тела удлиненной формы [п. РФ №2303792 МПК G01R 33/16, опубликован 27.07.2007 г.], заключающийся в том, что тело делят на продольные участки с неизвестными магнитными моментами. Измеряют параметры индукции магнитного поля вне тела в точках с заданными координатами. По результатам измерений составляют и решают линейную систему уравнений относительно магнитных моментов участков, при решении которой используют метод наименьших квадратов. Суммируя магнитные моменты участков, получают магнитный момент тела.
Однако данный способ, разработанный в интересах определения магнитных характеристик кораблей, имеет низкую чувствительность, определяемую величиной дипольного момента крупногабаритных тел со значением от единиц до сотен Ам2.
Известен способ, описанный в изобретении под названием «Определение и локализация дипольного момента» [п. США №5731996, МПК G01C 21/00, G01B 7/00, опубликован 24.03.1998 г.], заключающийся в том, что по периметру (части периметра) области измерений, в которой находится объект, устанавливают магнитометры, результаты измерений дипольного магнитного момента объекта которыми используются для предварительного определения локализации магнитного диполя. Проводятся расчеты магнитного поля, которое может быть сформировано магнитным диполем в месте предполагаемой локализации. Результаты расчета магнитного поля диполя в месте предполагаемой локализации сравниваются с результатами реальных измерений магнитного поля диполя и уточняется положение траектории объекта. Указанные операции повторяются до достаточно близкого совпадения фактических измерений магнитного момента с результатами расчетов локализации магнитного диполя (объекта).
Применяемый метод расчета состоит в том, что в области задается набор точек, которыми могут быть узлы квадратной сетки. Взяв произвольную точку и поместив в нее диполь, находят его дипольный магнитный момент, доставляющий минимум функционала (используется метод наименьших квадратов). Перебрав все точки, находят точку, в которой реализуется абсолютный минимум, который соответствует месту нахождения объекта.
Недостатком данного метода при определении дипольного магнитного момента слабо намагниченного объекта является его низкая чувствительность, т.к. он предназначен для определения магнитного момента и локализации достаточно крупных движущихся объектов, таких как автомобили, танки и пр., т.е. обладающих значительными магнитными моментами, фиксируемыми на достаточных удалениях.
Известен способ определения магнитного момента [В.Ю. Розов, А.В. Гетьман, СВ. Петров, А.В. Ерисов, «Магнетизм космических аппаратов», 2010 г., стр. 144-147], заключающийся в том, что, разместив объект на стенде в центре сферической измерительной системы, измеряют распределение индукции магнитного поля космического аппарата в 6 точках измерения, размещенных на сферической поверхности на осях, являющихся ортогональными осями объекта. По полученным данным расчетным методом находят компоненты дипольного магнитного момента остаточной намагниченности.
Определение магнитного момента проводится в определенных условиях, а именно:
- расстояние R от точки размещения чувствительной системы магнитометров на сферической поверхности до центра объекта должно быть больше трех максимальных линейных размеров L космического аппарата, то есть R≥3L;
- стенд для измерений находится в центре обособленного от промышленных предприятий участка площадью более 5 га;
- трехмерная компенсация геомагнитного поля и создание равномерного поля заданной величины и направления в рабочем объеме 9 м3 обеспечиваются системой катушек Гельмгольца габаритами 10×15×30 м.
Недостатки данного способа при определении магнитного момента слабо намагниченного объекта в условиях наличия неэкранированного геомагнитного поля и относительной близости металлических конструкций производственного помещения заключаются в необходимости выполнения условий: R≥3L, обеспечения однородности поля в объеме размещения объекта катушками Гельмгольца значительных габаритов, наличия обособленной обширной территории. Слабая намагниченность объекта требует приближения средств измерения к нему на расстояние R<31, что нарушает требование способа определения магнитного момента по прототипу, предполагающего монодипольную модель объекта как источника магнитного поля, реализуемую при удалении средства измерения на расстояние R≥3L.
Данное техническое решение принимается за прототип, как наиболее близкое к заявляемому способу.
Известен стенд для измерения электромагнитного поля вокруг объекта [п. РФ №2014624, МПК(1990.01) G01R 29/10, опубликован 15.06.1994 г.], содержащий основание (азимутальную направляющую), на котором установлена платформа с фиксирующимся объектом, располагающаяся в центре измерительной системы (угломестной направляющей), образовывающей сферический объем радиуса R, в измерительные точки которого устанавливаются датчики. Основание выполнено в форме кольца, а измерительная система - в форме полукольца и установлена с возможностью вращения по азимуту. Два зонда установлены с возможностью перемещения на измерительной системе. В плоскости основания установлены секции прямоугольной направляющей, на которой установлен с возможностью перемещения зонд. Прямолинейная направляющая может быть выполнена в виде телескопической штанги, а зонд установлен на ней неподвижно.
Достоинством данного стенда является возможность определения электромагнитных характеристик крупногабаритных объектов. Однако методика измерений снижает точность определения электромагнитных характеристик, за счет того, что измерение характеристик в верхнем полупространстве объекта проводится с использованием сферической методики сканирования, а в нижнем полупространстве объекта с использованием методики сканирования по плоской поверхности. Также дополнительная погрешность определения характеристик возникает при переустановке объекта для измерения электромагнитных характеристик при различных его ориентациях в пространстве.
Известен стенд, описанный в статье «Улучшение однородности магнитного поля в рабочей области магнитоизмерительного стенда» [B.C. Лупиков, Н.В. Крюкова, А.Е. Машнев, С.В. Петров, Д.Е. Пелевин, В.Е. Шубцов, «Электротехника и Электромеханика», 2005 г., №4, стр. 51-53], содержащий основание, на котором установлена платформа с фиксирующимся объектом, располагающаяся в центре измерительной системы, образовывающей сферический объем радиуса R (рабочую область). Стенд оснащен системой колец (обмоток) Гельмгольца. Обмотки колец расположены в трех ортогональных плоскостях. Платформа для установки объекта подвижна и выполнена из немагнитного материала.
К достоинствам указанного стенда можно отнести возможность определения магнитных характеристик крупногабаритных объектов и простоту конструкции. Но при этом для определения магнитных характеристик в большом количестве точек вокруг объекта конструкция существенно усложняется, за счет необходимости применения для каждой точки вокруг объекта отдельных вертикальных штанг и горизонтальных балок, что приводит к снижению точности измерения, за счет погрешности изготовления каждой штанги и балки в отдельности и их установки, а также за счет погрешности при переустановке объекта для измерения магнитных характеристик при различных ориентациях объекта в пространстве.
Известен стенд, описанный в изобретении под названием «Устройство для определения, по меньшей мере, одной величины, связанной с электромагнитным излучением тестируемого объекта» [п. РФ №2510512, МПК(2006.01) G01R 29/08, опубликовано 27.03.2014 г.], содержащий основание, на котором установлена платформа (держатель) с фиксирующимся объектом, располагающаяся в центре измерительной системы (сети измерительных антенн), образовывающей сферический объем радиуса R, в измерительные точки которого устанавливаются датчики (измерительные антенны). Платформа выполнена в виде стойки. Объект расположен на платформе с определением его азимутального положения и помещен в область центра сферического объема измерительной системы.
Достоинством указанного стенда является возможность проведение измерений электромагнитных параметров объекта измерений в неограниченном количестве точек измерения для объектов больших размеров при их различном пространственном положении. Недостатком указанного стенда является сложность установки крупногабаритного и/или тяжелого объекта измерения на средство относительного позиционирования и ограничение угла поворота объекта измерений за счет конструкции средства относительного позиционирования, точность совпадения центра объекта измерений с центром сферы, описываемой сетью электромагнитных датчиков, за счет взаимосвязи только в одной нижней точке стенда средства относительного перемещения и сети электромагнитных датчиков.
Описанный стенд принимается за прототип, как наиболее близкий к заявляемому стенду.
Задачей, решаемой группой изобретений, является повышение точности и достоверности измерений дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта при расширении функциональных возможностей.
Технический результат, на достижение которого направлена предлагаемая группа изобретений, заключается в определении компонент дипольного магнитного момента остаточной намагниченности слабо намагниченного объекта и тензора магнитной поляризуемости в условиях отсутствия экранирования внешнего магнитного поля, при всех точно заданных пространственных положениях объекта и радиусе сферической поверхности, на которой позиционируются точки измерения компонент магнитного поля объекта, находящимся в определенном соотношении с максимальным линейным размером объекта.
Указанный технический результат при осуществлении группы изобретений по объекту - способ определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта достигается тем, что способ заключается в том, что объект фиксируют на стенде в центре сферической измерительной системы, магнитометром измерительной системы измеряют значения трех компонент вектора магнитной индукции в измерительных точках, расположенных на поверхности сферической измерительной системы, затем по полученным данным расчетным методом находят дипольный магнитный момент остаточной намагниченности объекта, согласно изобретению магнитометром измеряют три раза значения трех компонент вектора магнитной индукции в специально выбранных измерительных точках для каждого для четырех положений объекта в стенде, а также по одному разу до установки объекта в стенд и после его снятия со стенда, при этом удаленным магнитометром измеряют компоненты вектора магнитной индукции геомагнитного поля синхронно с измерениями на стенде, причем компоненты дипольного магнитного момента объекта определяют с использованием результатов измерений радиальных компонент магнитной индукции в измерительных точках при нахождении объекта в стенде, при этом учитываются измерения удаленного магнитометра и измерения радиальных компонент магнитной индукции при отсутствии объекта в стенде, а расчетный метод заключается в том, что для нахождения трех компонент дипольного магнитного момента объекта, применяют интегрирование по поверхности сферы произведения радиальной компоненты индукции магнитного поля и трех сферических гармоник первого порядка, причем, используя кубатурную формулу для сферы, интегрирование по поверхности сферы заменяют суммированием с весами значений интегрируемой функции в специальных измерительных точках, при этом для четырех положений объекта в стенде используют систему координат объекта, в которой представляют вектор дипольного магнитного момента объекта для каждого его положения в стенде в виде суммы вектора дипольного магнитного момента остаточной намагниченности объекта и свертки тензора магнитной поляризуемости объекта с вектором магнитной индукции внешнего магнитного поля, решение полученной системы уравнений определяет компоненты вектора дипольного магнитного момента остаточной намагниченности и компоненты тензора магнитной поляризуемости.
Указанный технический результат при осуществлении группы изобретений по объекту - стенд для реализации способа достигается тем, что стенд содержит основание, на котором установлена платформа с закрепленным на ней объектом, при этом геометрический центр объекта совпадает с центром сферического объема радиусом R, в измерительных точках поверхности которого устанавливается магнитометр, при этом согласно изобретению основание выполнено в виде каркаса, на котором платформа установлена с помощью осей, на которых также установлены рамы для размещения магнитометров, причем центр измерительной системы датчика при установке на раме совпадает с заданной на сферической поверхности соответствующей измерительной точкой.
Заявляемые способ и устройство для его реализации взаимосвязаны настолько, что образуют единый изобретательский замысел. При создании способа определения дипольного магнитного момента остаточной и индуцированной намагниченности объекта было создано новое устройство -стенд для реализации способа - специально для осуществления указанного способа. Использование стенда позволяет получить требуемый технический результат - повышение точности и достоверности измерений дипольных магнитных моментов остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта при расширении функциональных возможностей.
Следовательно, заявляемые изобретения удовлетворяют требованию «единства».
При проведении анализа уровня техники, включающего поиск по патентным и научно-техническим источникам информации, выявления источников, содержащих сведения об аналогах заявленной группы изобретений, не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам заявленной группы изобретений.
Следовательно, каждый из объектов группы изобретений соответствует условию «новизна».
Новые признаки, содержащиеся в отличительной части формулы изобретения, не выявлены в технических решениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами:
на фиг. 1 представлена аксонометрическая проекция стенда для определения дипольного магнитного момента объекта;
на фиг. 2 - вид А фиг. 1, крепление магнитометра;
на фиг. 3 - угловые положения рамы верхней и нижней;
на фиг. 4 - угловые положения корпусов на раме верхней и нижней;
на фиг. 5 - сечение Б-Б фиг. 4, поперечное сечение поворотного кольца.
Способ реализуется следующим образом.
Исследуемый объект фиксируют на стенде в центре сферической измерительной системы радиуса R, центр которой совпадает с геометрическим центром объекта.
Соотношение R≥0.75L радиуса сферической поверхности R, и максимального линейного размера L объекта, а также количество измерительных точек на сферической поверхности, равное 62, определяются погрешностью определения магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта, заданной для данного метода расчета параметров магнитного момента с учетом показаний удаленного магнитометра. Оси декартовой системы координат удаленного магнитометра и стенда колинеарны друг другу.
При измерениях на стенде без объекта магнитное поле в рабочем объеме стенда, состоящее из геомагнитного поля и магнитного поля металлических элементов конструкции здания, должно удовлетворять условию - разность между максимальными и минимальными значениями компонент вектора индукции магнитного поля, измеренная в 62 измерительных точках, в системе координат стенда, не должна превышать 3000 нТ.
Во время проведения измерений на стенде с объектом и без объекта геомагнитное поле должно контролироваться удаленным магнитометром, при этом разность между максимальными и минимальными значениями компонент вектора индукции геомагнитного поля, измеряемыми синхронно с измерениями на стенде, не должна превышать 10 нТ.
Программа измерений состоит из 5 циклов измерений компонент вектора индукции магнитного поля для каждого из 4-х положений объекта в стенде:
цикл i=1 - при отсутствии объекта в стенде;
циклы i=2, 3, 4 - при нахождении объекта в стенде в одном из 4-х специально заданных положениях;
цикл i=5 - после снятия объекта со стенда.
Объект имеет свою декартовую систему координат, при этом направление оси ОХ совпадает с направлением максимального линейного размера объекта. При измерениях в циклах i=2, 3, 4 последовательно устанавливается в следующие положения:
Положение 1 - ось ОХ направлена на геомагнитный полюс и образует угол а с горизонтальной плоскостью, который дополняет до 90° угол магнитного наклонения, соответствующий широте и долготе места проведения измерений. При этом ось OY направлена на восток, а направление оси OZ совпадает с направлением вектора геомагнитного поля.
Положение 2 - ось ОХ объекта совпадает с направлением вектора геомагнитного поля, ось OY направлена на запад.
Положение 3 - ось ОХ направлена на геомагнитный полюс, при этом направление оси OY объекта совпадает с направлением вектора геомагнитного поля;
Положение 4 - ось ОХ направлена согласно ее направлению в положении объекта n=1, при этом направление оси OZ противоположно направлению вектора геомагнитного поля.
Измерения компонент индукции магнитного поля в специально выбранных измерительных точках сферической поверхности, обеспечивает стенд (фиг. 1), при этом не показан удаленный магнитометр, измеряющий компоненты индукции геомагнитного поля на расстоянии R=10L от геометрического центра объекта.
Для фиксированного положения объекта на стенде, по результатам 5-ти этапов измерений компонент вектора магнитной индукции, с учетом показаний удаленного магнитометра, измерения которого проводятся синхронно с измерениями в каждой k-той точке, заданной на сфере, находится в системе координат стенда магнитное поле, созданное объектом:

а также находится внешнее среднее магнитное поле, действующее на объект:
где  - индукция магнитного поля объекта в k-той измерительной точке для i-го цикла;
- индукция магнитного поля объекта в k-той измерительной точке для i-го цикла;
 - индукция геомагнитного поля, измеренная удаленным магнитометром в i-том цикле в момент измерения на стенде в k-той измерительной точке.
- индукция геомагнитного поля, измеренная удаленным магнитометром в i-том цикле в момент измерения на стенде в k-той измерительной точке.
Определение компонент дипольного магнитного момента слабо намагниченного объекта (D=(0.1-1) Ам2) по результатам измерений компонент индукции магнитного поля в 62 измерительных точках на сферической поверхности производится расчетным методом.
Нахождение дипольного магнитного момента по первому способу связан с применением интегрирования по сфере измерений. Данный метод использует измерения только радиальных компонент магнитной индукции. Преимущество представленного метода заключается в том, что он практически не требует затрат времени на вычисления, имеет небольшую погрешность в определении компонент дипольного магнитного момента объекта (не более 5%).
Если диполи расположены внутри сферы, на поверхности которой проводятся измерения, то имеют место следующие равенства (Yi,j,k - сферические гармоники первого порядка)
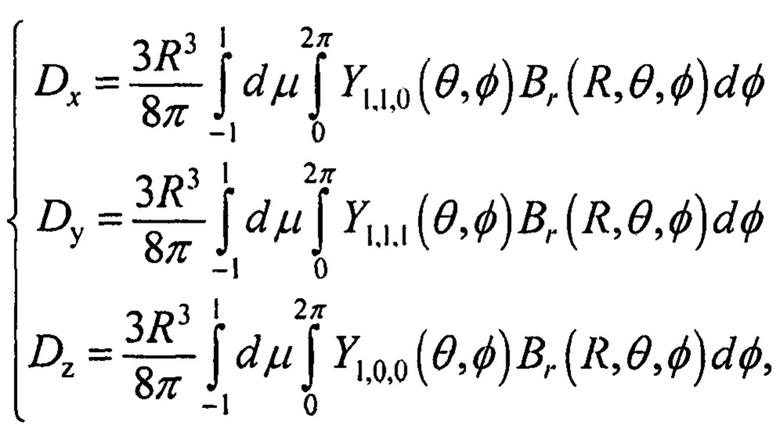
где: Y1,1,0(θ,φ)=cosφsinθ, Y1,1,1(θ,φ)=sinφsinθ, Y1,0,0(θ,φ)=соsθ.
Кубатурная формула на сфере 11-го порядка точности позволяет интегрирование по сфере заменить суммированием с весами значений интегрируемой функции в центрах граней 12-ти пятиугольников, в 20-ти вершинах и в 30 серединах ребер пятиугольников. Как результат - получают компоненты дипольного магнитного момента:
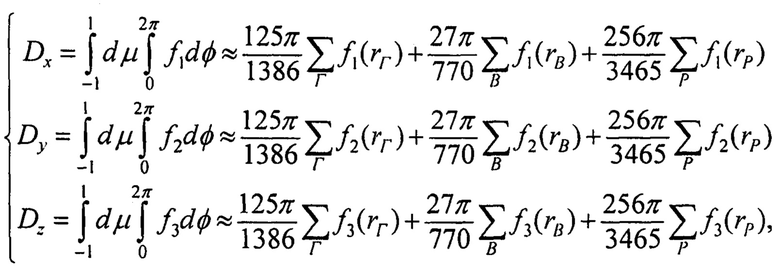
где: 

Применение кубатурных формул для сферы, по сравнению с традиционным интегрированием по поверхности сферы, позволяет при одинаковой погрешности определения дипольного магнитного момента более чем на порядок уменьшить число измерительных точек на сфере, в которых проводится измерение радиальных компонент магнитного поля.
Для определения вектора D0 и тензора магнитной поляризуемости К используются четыре положения объекта на стенде.
В системе координат объекта дипольный магнитный момент для m-го положения объекта на стенде D(m) слагается из дипольного магнитного момента остаточной намагниченности объекта D0 и свертки тензора магнитной поляризуемости объекта К с вектором магнитной индукции внешнего магнитного поля  ,
,
где m=1, 2, 3, 4 положения объекта на стенде; i, j=1, 2, 3;
Kij - компоненты тензора магнитной поляризуемости объекта;
 - компоненты вектора магнитной индукции внешнего магнитного поля.
- компоненты вектора магнитной индукции внешнего магнитного поля.
В результате решения данной системы уравнений определяют три компоненты вектора дипольного магнитного момента остаточной намагниченности D0,i и девять компонент тензора магнитной поляризуемости Kij.
Определение дипольного магнитного момента объекта при количестве измерительных точек N≤62 обеспечивает второй метод расчета, представляющий источник магнитного поля объекта в виде суперпозиции двух диполей. Их компоненты и координаты местоположения определяются путем минимизации отклонения измеренных компонент индукции поля объекта от соответствующего аналитического выражения для поля двух разнесенных магнитных диполей.
В области, покрывающей изучаемый объект, задается набор точек {rj}, например, это могут быть узлы кубической сетки. Выбором произвольной пары точек (ri, rj) и помещением в них диполей находятся дипольные моменты этих диполей (di, dj), доставляющие минимум целевой функции
которая определяет относительную погрешность нахождения дипольного магнитного момента объекта.
Уравнение минимизации записывают в следующем виде:

где:
Искомые дипольные моменты (di,dj) находят решением системы:

Перебором всех возможных пар точек (ri,rj) находят пару, в которой реализуется минимум:

Найденная пара  позволяет определить дипольный магнитный момент:
позволяет определить дипольный магнитный момент:
Координаты найденной пары можно уточнить. Для этого ограничивают малыми окрестностями найденные точки, в которых задают новые наборы точек. Приведенную процедуру повторяют при условии выбора пары точек из разных окрестностей.
Стенд для реализации способа (фиг. 1) содержит основание 1 с двумя симметрично расположенными шарнирными опорами 2, образующими ось поворота 3, в которые цапфами 4 установлено поворотное кольцо 5. В поворотном кольце 5 при помощи крепежных элементов 6 закреплен объект 7, имеющий центральную продольную ось 8. Оси 3 и 8 пересекаются в точке 9, являющейся центром воображаемой сферы, радиус R которой равен расстоянию от точки 9 до центра измерительной системы 10 (фиг. 2) магнитометра 11.
На цапфах 4 шарнирно установлены нижняя 12 и верхняя 13 рамы.
Нижняя рама 12 может поворачиваться вокруг оси 3 и фиксироваться в трех угловых положениях, соответствующих повороту на угол равный 0°, 18° или 342° (фиг. 3). Угловое положение нижней рамы 12 фиксируется при помощи двух симметрично расположенных относительно объекта 7 фиксаторов 14, вставляющихся в отверстия 15 корпусов 16, закрепленных на верхней раме 13, при совмещении соответствующих отверстий 17 в секторах 18 нижней рамы 12 и отверстий 15 корпусов 16. На нижней раме 12 установлено тринадцать корпусов 19 в определенных угловых положениях.
Верхняя рама 13 может поворачиваться вокруг оси 3 и фиксироваться в семнадцати угловых положениях, соответствующих повороту на угол в диапазоне от 36° до 324° с шагом в 18° (фиг. 3). Угловое положение верхней рамы 13 фиксируется при помощи двух симметрично расположенных относительно объекта 7 фиксаторов 20, вставляющихся в отверстия 21 корпусов 22, закрепленных на основании 1, при совмещении соответствующих отверстий 23 в секторах 24 верхней рамы 13 и отверстий 21 корпусов 22. На верхней раме 13 установлено одиннадцать корпусов 19 в определенных угловых положениях.
В корпус 19 установлена обойма 25 в виде полой трубки зафиксированной винтами 26, во внутренней полости которой расположен магнитометр 11, зафиксированный винтом 27 (фиг. 2).
К основанию 1 симметрично относительно объекта 7 прикреплены две плиты 28, в каждой из которых выполнены отверстия 29 для установки фиксатора 30 (фиг. 1).
Снизу поворотного кольца 5 установлен переходник 31 с двумя пазами 32, в которые вставляются фиксаторы 30 при совпадении с отверстиями 29 плит 28. Поворотное кольцо 5 фиксируется в трех положениях, соответствующих углу поворота: 0°, 90°, 270° (фиг. 5). К переходнику 31 симметрично относительно объекта 7 прикреплены две пластины 33 с отверстиями 34, предназначенными для поворота кольца 5 с установленным объектом 7 при помощи грузоподъемного крана (не показано).
На расстоянии, много превышающем радиус R, равный расстоянию от точки 9 до центра измерительной системы 10 магнитометра 11, установлен второй магнитометр (не показано) для измерения компонент индукции геомагнитного поля, результаты измерений которого учитываются при измерениях, проводимых магнитометром 11.
Стенд работает следующим образом.
В исходном состоянии поворотное кольцо 5 и верхняя рама 13 установлены горизонтально и зафиксированы от поворота фиксаторами 30 и 20 соответственно, а нижняя рама 12 установлена вертикально вниз и зафиксирована фиксаторами 14.
Объект 7 устанавливается в поворотное кольцо 5 и фиксируется при помощи крепежных элементов 6.
Для изменения углового положения кольца 5 с объектом 7 вынимают фиксаторы 30. Затем за отверстия 34 одной из пластин 33 зацепляют грузозахватное приспособление (не показано) и с помощью крана (не показано) поворачивают кольцо 5 с объектом 7 на требуемый угол до совмещения пазов 32 переходника 31 с отверстиями 29 плит 28 (фиг. 5) для установки фиксаторов 30, фиксирующих необходимое положение кольца 5 с объектом 7.
Для измерения компонент индукции магнитного поля обойму 25 с магнитометром 11 устанавливают в корпус 19 нижней рамы 12 и фиксируют винтами 26. Затем регистрируют показания магнитометра 11, а после обойму 25 с магнитометром 11 вынимают и переставляют в следующий корпус 19, фиксируя винтами 26. Операция повторяется для всех требуемых корпусов 19 при заданном угловом положении нижней рамы 12. По завершению регистрации показаний магнитометра 11 во всех требуемых корпусах 19 нижнюю раму 12 поворачивают, вынув фиксаторы 14, в новое угловое положение, соответствующее углу поворота равному 18°, до совпадения необходимого отверстия 17 сектора 18 с отверстием 15 корпуса 16 для установки фиксаторов 14. После установки нижней рамы 12 в новое угловое положение повторяют операции по регистрации показаний магнитометра 11 в требуемых корпусах 19. По окончанию регистрации показаний магнитометра 11 нижнюю раму 12 аналогично поворачивают в угловое положение соответствующее углу поворота равному 342° и повторяют операции по регистрации показаний магнитометра 11.
По окончанию регистрации нижнюю раму 12 открепляют от верхней рамы 13, вынув фиксаторы 14, и поворачивают верхнюю раму 13, вынув фиксаторы 20, в угловое положение, соответствующее углу поворота равному 36°, до совпадения отверстий 21 корпусов 22 с соответствующими отверстиями 23 секторов 24 для установки фиксаторов 20. Затем аналогично предшествующему этапу измерения компонент индукции магнитного поля обойму 25 с магнитометром 11 устанавливают в корпус 19 верхней рамы 13 и регистрируют показания магнитометра 11 в каждом требуемом корпусе 19. После регистрации всех показаний верхнюю раму 13 аналогично поворачивают в следующее угловое положение, соответствующее углу поворота в диапазоне от 54° до 324°, регистрируя в каждом угловом положении показания магнитометра 11 во всех требуемых корпусах 19 верхней рамы 13.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявленной группы изобретений следующей совокупности условий:
- использование в области определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта результатов измерений компонент индукции магнитного поля объекта в условиях отсутствия экранирования внешнего магнитного поля;
- для заявленного способа и устройства в том виде, как они охарактеризованы в независимых пунктах формулы изобретения, подтверждена возможность их осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов;
- способно обеспечить повышение точности и достоверности измерений дипольных магнитных моментов остаточной и индуцированной намагниченностей при расширении функциональных возможностей.
Следовательно, заявляемая группа изобретений соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПОМЕХИ НА КОСМИЧЕСКОМ АППАРАТЕ В ПОЛЕТЕ | 2009 |
|
RU2408507C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНЫХ МОМЕНТОВ ОБЪЕКТА | 2016 |
|
RU2628448C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ГЕОМАГНИТНОГО ПОЛЯ | 1986 |
|
SU1426256A1 |
| Устройство для определения координат и магнитного момента дипольного источника поля | 1985 |
|
SU1279376A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |

Группа изобретений относится к области определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта. Стенд для реализации способа определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта содержит основание, платформу, измерительную систему и магнитометры, при этом объект зафиксирован на платформе, установленной на основании и расположенной в центре измерительной системы, образующей сферический объем радиуса R, а магнитометры установлены в измерительных точках поверхности сферического объема, при этом стенд для реализации способа содержит по меньшей мере один магнитометр, а основание выполнено в виде каркаса, на котором установлена платформа с помощью осей, на которых также установлена измерительная система, выполненная в виде рамы с расположенными на ней обоймами для крепления магнитометра, причем магнитный центр магнитометра при установке на раму совпадает с соответствующей измерительной точкой на поверхности сферического объема. Технический результат – повышение точности и достоверности измерений дипольных магнитных моментов остаточной намагниченности и тензора магнитной поляризуемости слабо намагниченного объекта при расширении функциональных возможностей. 2 н. и 2 з.п. ф-лы, 5 ил.
1. Способ определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта, заключающийся в том, что объект фиксируют на стенде в центре сферической измерительной системы, магнитометром измерительной системы измеряют значения трех компонент вектора магнитной индукции в измерительных точках, расположенных на поверхности сферической измерительной системы, затем по полученным данным расчетным методом находят дипольный магнитный момент остаточной намагниченности объекта, отличающийся тем, что магнитометром измеряют три раза значения трех компонент вектора магнитной индукции в специально выбранных измерительных точках для каждого из четырех положений объекта в стенде, а также по одному разу до установки объекта в стенд и после его снятия со стенда, при этом удаленным магнитометром измеряют компоненты вектора магнитной индукции геомагнитного поля синхронно с измерениями на стенде, причем компоненты дипольного магнитного момента объекта определяют с использованием результатов измерений радиальных компонент магнитной индукции в измерительных точках при нахождении объекта в стенде, при этом учитываются измерения удаленного магнитометра и измерения радиальных компонент магнитной индукции при отсутствии объекта в стенде, а расчетный метод заключается в том, что для нахождения трех компонент дипольного магнитного момента объекта применяют интегрирование по поверхности сферы произведения радиальной компоненты индукции магнитного поля и трех сферических гармоник первого порядка, причем, используя кубатурную формулу для сферы, интегрирование по поверхности сферы заменяют суммированием с весами значений интегрируемой функции в специальных измерительных точках, при этом для четырех положений объекта в стенде используют систему координат объекта, в которой представляют вектор дипольного магнитного момента объекта для каждого его положения в стенде в виде суммы вектора дипольного магнитного момента остаточной намагниченности объекта и свертки тензора магнитной поляризуемости объекта с вектором магнитной индукции внешнего магнитного поля, решение полученной системы уравнений определяет компоненты вектора дипольного магнитного момента остаточной намагниченности и компоненты тензора магнитной поляризуемости.
2. Способ определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта по п. 1, отличающийся тем, что расчетный метод заключается в том, что в области, покрывающей объект, задается набор точек, являющихся узлами кубической сетки, при этом, выбирая произвольную пару точек и помещая в них диполи, находят дипольные моменты этих диполей, доставляющие минимум целевой функции, являющейся среднеквадратичным отклонением с весами разности расчетных и измеренных компонент индукции магнитного поля, причем весами являются обратные модули экспериментальных значений индукции магнитного поля, при этом перебором всех возможных пар точек находят пару точек, в которой реализуется абсолютный минимум целевой функции, и по найденной паре диполей определяют дипольный магнитный момент объекта, равный их сумме.
3. Способ определения дипольного магнитного момента остаточной намагниченности и тензора магнитной поляризуемости объекта по п. 1, отличающийся тем, что при проведении измерений на стенде без объекта магнитное поле в рабочем объеме стенда должно находиться в соответствующих контрольных пределах, при этом при проведении измерений на стенде с объектом и без объекта геомагнитное поле, контролируемое удаленным магнитометром, должно находиться в соответствующих контрольных пределах.
4. Стенд для реализации способа по п. 1, содержащий основание, платформу, измерительную систему и магнитометры, при этом объект зафиксирован на платформе, установленной на основании и расположенной в центре измерительной системы, образующей сферический объем радиуса R, а магнитометры установлены в измерительных точках поверхности сферического объема, отличающийся тем, что стенд для реализации способа содержит по меньшей мере один магнитометр, а основание выполнено в виде каркаса, на котором установлена платформа с помощью осей, на которых также установлена измерительная система, выполненная в виде рамы с расположенными на ней обоймами для крепления магнитометра, причем магнитный центр магнитометра при установке на раму совпадает с соответствующей измерительной точкой на поверхности сферического объема.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОЙ ВЕЛИЧИНЫ, СВЯЗАННОЙ С ЭЛЕКТРОМАГНИТНЫМ ИЗЛУЧЕНИЕМ ТЕСТИРУЕМОГО ОБЪЕКТА | 2009 |
|
RU2510512C2 |
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| Устройство для измерения дипольного магнитного момента | 1991 |
|
SU1817049A1 |
| WO 2019057961 A1, 28.03.2019. | |||

