(54) КВАНТОВЫЙ КОМПОНЕНТНЫЙ МАГНИТОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| КВАНТОВЫЙ КОМПОНЕНТНЫЙ МАГНИТОЛ\ЕТР | 1973 |
|
SU382989A1 |
| Компонентный магнитометр | 1984 |
|
SU1226386A2 |
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| Устройство для аэрогеофизическойРАзВЕдКи | 1979 |
|
SU805232A1 |
| Квантовая магнитометрическая система | 1977 |
|
SU739453A1 |
| Компонентный магнитометр | 1979 |
|
SU890283A1 |
| СПОСОБ СЪЕМКИ ГЕОМАГНИТНОГО ПОЛЯ НА АКВАТОРИИ БУКСИРУЕМЫМ МАГНИТОМЕТРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2587111C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ МАГНИТОМЕТРА | 2008 |
|
RU2386141C1 |
| СПОСОБ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2008 |
|
RU2390803C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ГОРИЗОНТАЛЬНО^Й СОСТАВЛЯЮЩЕЙ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 1970 |
|
SU278140A1 |
Изобретение относится к области геофизики, а именно к классу приборо используемых для измерения составляю щих вектора напряженности магнитного поля Земли в движении. Известно устройство содержащее гировертикаль и квантовый магиитометр, жестко закрепленный в буксируе мой гондоле и установленный в центре системы из жестко закрепленных на объекте трех взаимно перпендикулярных пар колец Гельмгольца, систему автокомпенсации, датчики которой уст новлены на гировертикали и связаны с колечными системами fl. Определение компонент производится счетно-решающим устрюйством, в которое вводятся значения измеренйых компонент магнитного поля и поправки на углы наклона, постоянно измер емы датчиками системы автокомпенсации, установленными в гондоле. Недостатком такой схема построения являетря необходимость размещени дополнительной аппаратуры в буксируемой гондоле,что ведет к увеличению сигнсшьных жил кабель-буксира и снижению точности измерений магнитного поля за счет собственной переменной намагниченности элементов гироприборов, использования сложного в эксплуатации счетно-решающего устройства. Известен также квантовый компонентный магнитометр, содержащий квантовый магниточувствительный датчик с блоком формирования сигнала, колечнук систему токовой компенсации с целью питания, систему автоматической компенсации вертикальной составляющей вектора магнитного поля Земли, систему компенсации колебаний колечнрй системы, измерительное устройство и регистратор. Колечная система токовой компенсации выполнена в виде полой маятниковой усеченной сферы с проточками для колец, стабилизированной в двойном карданном подвесе. В центре коленчатой системы установлен магниточувствительный датчик, ориентация которого устанавливается с помощью система ориентации датчика 2. Недостатком такого компонентного магнитометра является то, что его характеристики по точности измерения компонент магнитного поля Земпи, а также его эксплуатационные качества, определяются степенью стабилизации токовых колец колечной сястеглл относительно истинной вертикали, то есть конструктивной схемой стабилиэированной платформы.. Так как прибор находится на движущейся платфо ше в буксируемой гондоле, :то вследствие влияния переменных ускорений на точку подвеса., маятниковая колечная система имеет колебания относительно точки подвеса. ААШЛитуда этих колебаний зависит от параметров буксировки(скорости хода судна, длина кабельбуксира, величины и направления волнения, величины заглубления гондолы и ее стабилизации) и имеет переменный характер. Необходимая точность в измерении кокшонента в этом случае достигается за счет автоматического осреднения результатов измерения за время, значительно превышающее собственный период колебаний, колечной систекал, что приводит к уменьшению частоты измерений.
Целью изобретения является повышение точности измерения за счет исключения влияния условий буксировки на результаты .измерения.
Поставленная цель достигается тем что в квантовый компонентный магнитометр, содержащий квантовый магниточувствительный датчик с блоком формирования сигнала, колечную систему токовой компенсации с цепью питания систему автоматической компенсации вертикальной составляющей вектора магнитного поля Земли, систему компенсации колебаний колечной систекы, измерительное устройство и регистратор, дополнительно введена система компенсации колебаний колечной системы относительно вертикали с элементом регулировки тока, а цепь питания колечной cHCTeNBsi выполнена по мостовой схеме, в одно из плеч которой последовательно с колечной системой включен элемент регулировки тока системы компенсаций колебаний колечной системы относительно верт|1кали, причем вход этой системы компенсации подключен к выходу форШ1 рователя сигнала и входу из июрительного устройства, а выход - к входу системы автокомпенсации вертикальной составляющей вектора магнитного поля Эемйи, элемент регулировки тока которой включен в другое плечо моста.
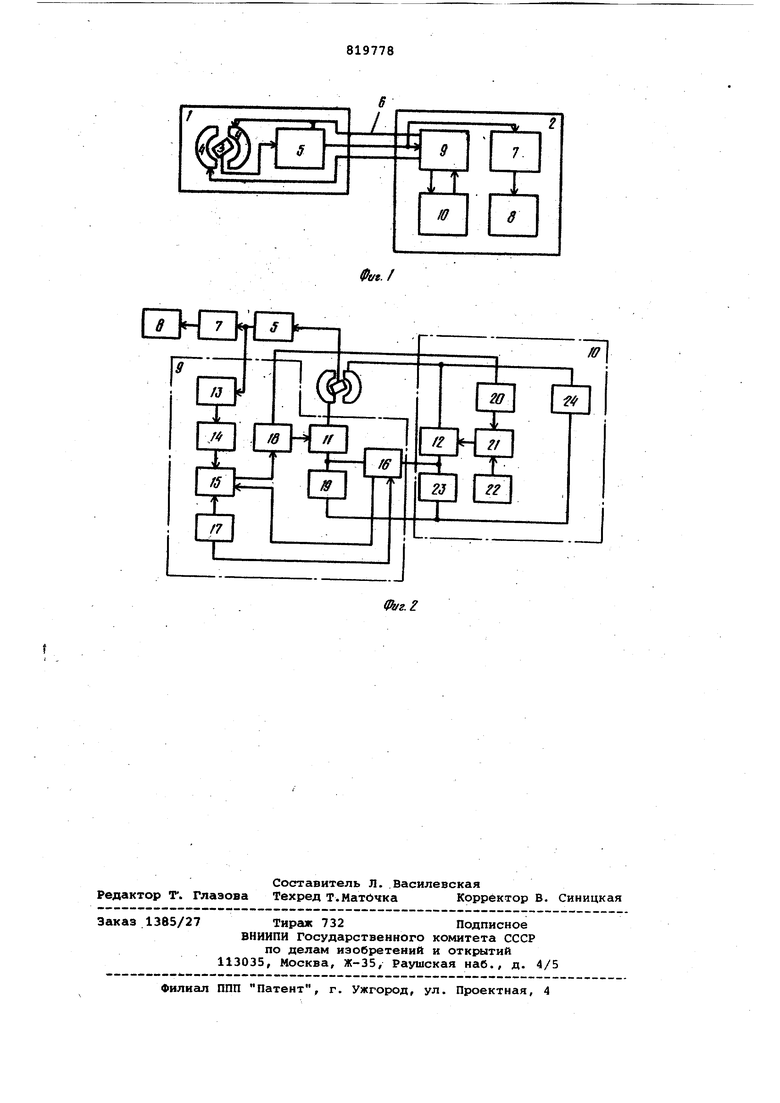
На фиг. 1 изобрс1жена блок-схенца квантового компонента магнитометра, на фиг. 2 представлена ckeMa построения квантового компонентного магнитометра.
В немагнитной гондоле 1 (фиг. 1) буксируемой за кораблем 2, расположе квантовый магниточув9Т8ительный датчик 3 с колечной системой токовой компенсации 4. В носовой части гондолы 1 расположен блок формирования сигнала 5. Буксируемая гондола 1 соединена с аппаратурой, расположенной на борту судна-буксировщика 2/ при помощи немагнитного кабеля-буксира 6. Бортовгш аппаратура включает в
себя измерительное устройство 7, регистратор 8, систему компенсации колебаний колечной системы-токовой компенсации относительно вертикали 9 и систему авто компенсации вертикальной составляющей вектора магнитного поля Земли 10.
Развернутая функциональная схема квантового компонентного магнитометра (фиг. 2), основой которого является мост постоянного тока, в одно из плеч которого последовательно с колечной системой токовой компенсации 4 включен регулирукяций элемент, 11 системы компенсации колебаний колечной системы .токовой компенсации оносительно вертикали 9, .а. в другое плечо - регулирующий элемент 12 системы автокомпенсации вертикальной составляющей магнитного поля Земли 10.
Система компенсации колебаний колечной системы токовой компенсации относительно вертикали 9 (фиг. 2) включает в себя частотный детектор
13,вход которого соединен с выходом формирователя сигнала 5 и входом измерительного устройства 7, а выход - с входом фильтра низкой частоты 14, синхронный детектор 15, соединенный по входам с фильтром низкой частоты
14,модулятором 16 и генератором импульсов 17, а. выход которого соединен со входом усилителя постоянного тока 18, к .одному выходу которого подключен регулирующий элемент 11, входящий в плечо моста последдвательно с колечной системой то.ковой компенсации 4 и эталонным сопротивлением 19, в другой выход этого усилителЯ соединен со входом порогового устройства 20, входящего в состав систекш автокомпенсадии вертикальной составляющей магнитного поля Земли 1 включакнций в себя реверсивный счетчик 21, один вход которого подключен к выходу порогового устройства 20, а другой вход соединен с блоком ручной начальной.установки тока компенсации 22, а выход подключен ко входу преобразователя код-ток 12, входящего в качестве регулирующего элемента вместе с эталонным сопротивлением 23 в другое плечо моста, питание которюго осуществляется от высокостабильного источника питания 24, при этом в диагональ моста включен модулятор 16, соединенный по входу со вторым выходом генератора импуль.сов 17.
Работа прибора осуществляется следуклцим образом.
Начальная компенсация вертикальной составляющей магнитного поля Земли по минимуму показаний измерительного устройства 7 осуществляется блоком ручной начальной установки тока компенсаций 22 при помощи реверсивного счетчика 21, выходы которого соединены с преобразователем код-то 12, что обеспечивает протекание через эталонное сопротивление 23 тока от высокостабильного источника пита ния 24 и создание на этом сопротивлинйи падения напряжения, соответствующего скомпенсированному. При наличии разности потенциалов в диагональ моста (на эталонных сопротивлениях 19 и 23) включается цеп обратной связи, состоящая из модулятора 16, синхронного детектора 15 и регулирующего элемента 11, включенного последовательно в цепь питания колечной системы токовой компенсации 4. Импульсы от генератора 17 поступают одновременно на модулятор 16 и синхронный детектор 15, на выходе ко торого появляется напряжение, пропор циональное величине рассогласования в диагонали моста. Это напряжение усиливается усилителем постоянного тока 18 и поступает на регулирующий элемент 11, имеющий квазилинейную характеристику регулирования, который компенсирует величину рассогласо вания, т.е. уменьшает или увеличиваот протекание тока через плечо моста в которое включена колечная система токовой компенсации 4. При наличии разности потенциала в диагонали моста, равной нулю, система будет полностью скомпенсированной. После этого система переводится в режим автокомпенсации, для чего блок ручной начальной установки тока компенсации 22 отключается, а включается цеп обратной связи с усилителем постоянного тока 18 и пороговым устройством 20, обеспечивающая автоматическое переключение реверсивного счетчика 21 при выходе из диапазона регу лирования (при увеличении или уменьшении величины измеряемого поля), формируемого пороговым устройством 20. При буксировке колечная система токовой компенсации 4 испытывает колебание относительно истинной вертикали. Сигнал, зарегистрированный маг ниточувствительным датчиком 3 на выходе формирователя сигнала 5,, будет промодулирован по частоте с периодом равным периоду колебаний колечной системы 4. Для осуществления компенс ции колебаний колечной системы 4 и в деления воздействия на регулирующий. элемент 11, сигнал с выхода формирователя сигнала 5 поступает на вход частотного детектора-13 и- фильтра низкой частоты 14, на выходе которых получается сигнал низкочастотной оги бающей в полосе от 2 до 0,05 Гц. Переменный сигнал регулирующего воздей ствия с выхода фильтра поступает на синхронный детектор 15 и на усилитель постоянного тока 18, который воздействуя на регулирующий элемент 11 компенсирует колебания колечной системы токовой компенсации 4 относительно вертикали путем регулирования тока, протекающего через эту колечную систему, по закону колебания системы при условии поддержания оптимальной компенсации измеряемом диапазоне полей системой автокомпенсации 10. Таким образом осуществляется двойная автокомпенсация тока в колечной системе 4. Лабораторные испытания макета показали полную работоспособность прибора. Система компенсации колебаний колечной системы уверенно компенсирует колебания колечной системы до частот порядка 18-20 Гц. Формула изобретения Квантсэвый компонентный магнитометр, содержащий квантовый магниточувствительный датчик с блоком формирования сигнала, колечную систему токовой компенсации с. цепью питания, систему автоматической компенсации вертикальней составляющей вектора магнитного поля Земли, систему компенсации колебаний колечной системы, измерительное устройство и регистратор, отличающийся тем, что, с. целью повышения точности измерений за счет исключения влияния условий буксировки на результаты измерения, в него дополнительно введена система комг1енсации колебаний колечной системы относительно вертикали с элементом регулировки тока, а цепь питания колечной системы выполнена по мостовой схеме, в одно из плеч которой последовательно с колечной системой включен элемент регулировки тока, системы компенсации колебаний колечной системы относительно вертикали, причем вход этой системы компенсации подключен к выходу формирователя сигнала и входу измерительного устройства, а выход - к входу системы автокомпенсации вертикальной составляющей вектора магнитного поля Земли, элемент регулировки тока которой включен в другое плечо моста. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 278140, кл. G 01 V 3/16, 1968. 2.Авторское свидетельство СССР 382989, кл. G 01 V 3/14, 1971 (прототип)..
