Изобретение относится к области магнитных измерений и предназначено для геомагнитных поисков и разведки полезных ископаемых и объектов техногенного происхождения.
Цель изобретения - повышение точности.
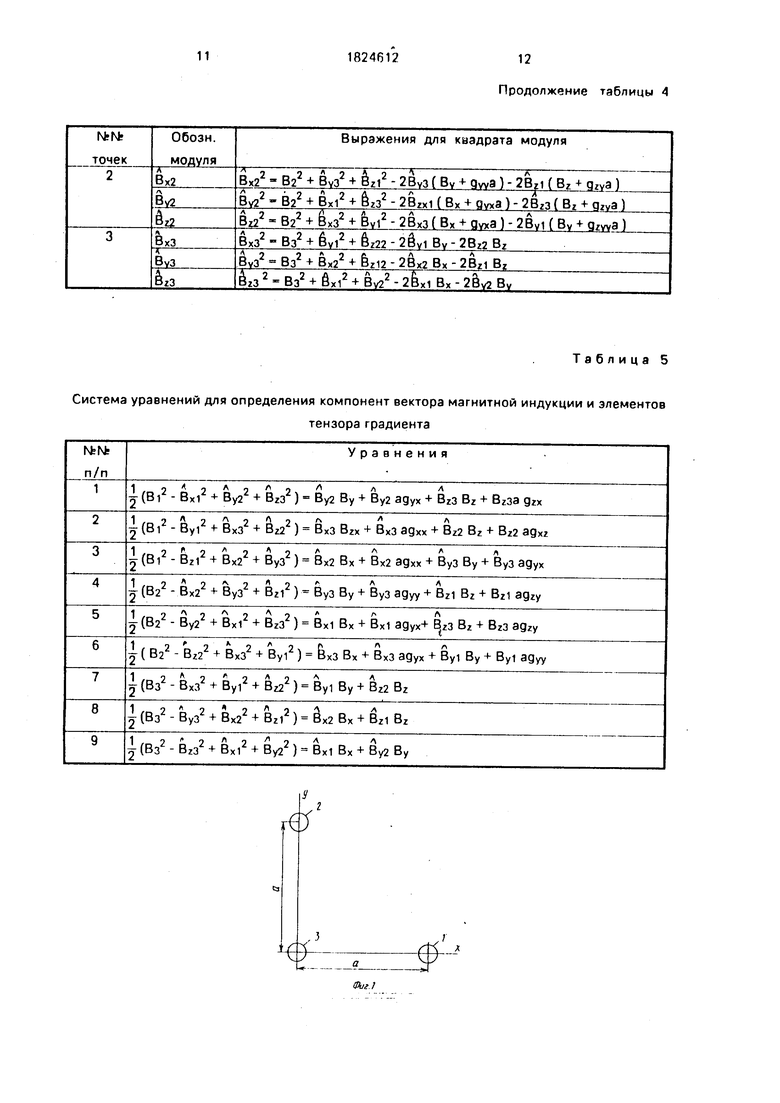
На чертежах приведены: фиг.1 - система координат и схема расположения ММ, фиг.2 - функциональная схема одного из возможных вариантов устройства для осуществления способа.
На фиг.1 изображена прямоугольная правая система координат OXVZ, ось OZ,
которой ориентирована по гравитационной вертикали.
Три ММ 1, 3 расположены в точках с координатами Si (а, о, о), S2 (О, а, о) и 5з (о, о, о), т.е. в вершинах равнобедренного пря- моугольного треугольника с катетами а Устройство содержит также три колечные системы 4, 5 и 6, каждая из которых содержит по три компенсационных кольца, блок коммутации 7, преобразователи кодов в силу тока 8, 9 и 10, блок синхронизации 11 и ЭВМ 12. ММ 1, 2 и 3 расположены внутри колечных систем 4, 5 и 6. Причем оси компенсационных колец взаимно ортогональны и ориентированы параллельно осям систе00
ю
4 О
ю
мы координат OXVZ. Входы блок коммутации 7 подключены через преобразователи кодов в силу тока 8. 9 и 10 к выходам ММ 1. 2 и 3 соответственно. Управляющий вход блока 7 соединен с выходом блока синхро- ниэации 11, а выходы соединены с компенсационными кольцами колечных систем 4,5 и 6. Входы ЭВМ 12 соединены t выходами ММ 1. 2 и 3, управляющий вход соединен с выходом блока синхронизации 11. а выход ЭВМ служит выходом всего устройства.
Операции способа характеризуются следующими математическими зависимостями и расчетными соотношениями.
Измерения выполняют по сигналам каждого из трех ММ одновременно, причем в объеме каждого из ММ компенсируют по две неизмеримые КМИ по сигналами двух других ММ. л
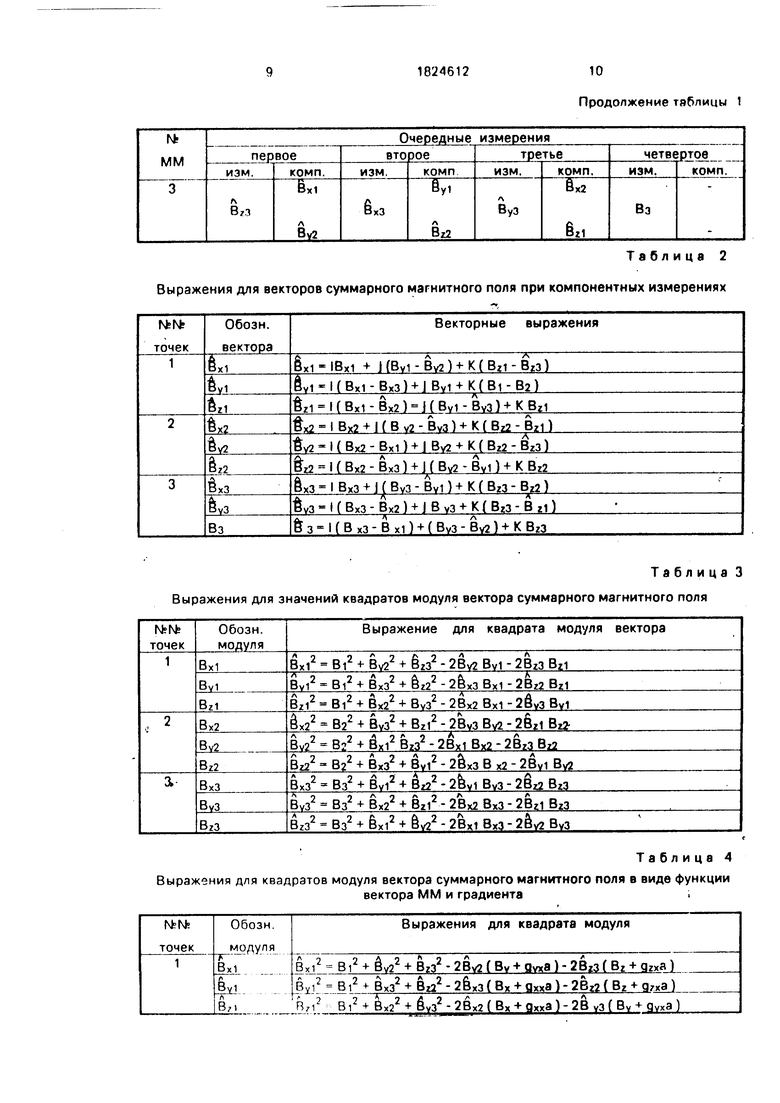
Обозначим Bxi значение модуля ВМИ, измеренное по сигналу ММ 1 при компенсации КМИ By и fit no сигналам ММ 2 и 3 соответственно. Значения скомпенсированных КМИ устанавливают автоматически, равными соответствующим значениям модулей ВМИ Ву2 И В/3Поочередно выполняют три серии измерений, в каждой из которых компенсируют по две КМИ. В четвертой серии измерений компенсацию КМИ не выполняют, а измеряют полные значения модуля ВМИ Bi, Вг и Вз. Обозначения измеряемых величин и компенсируемых КМИ в каждой из четырех серий измерений приведены табл.1.
Ввиду неоднородности магнитной индукции и размещения ММ в различных точках пространства значения КМИ а точках их компенсации отличаются от их значений в точках измерения. Компенсация иемэмеря- емых КМИ оказывается неполной. Выражения для векторов суммарного магнитного поля, соответствующие режимам измерения согласно таблице 1. приведены в табл.2.
В табл.3 приведены соответствующие выражения для квадратов модулей измеряемых величин.
Для полноты информации о магнитном поле измерения КМИ недостаточны. Необходима также информация о неоднородно- сти магнитной индукции, чтобы по результатам измерений можно было рассчитать магнитное поле в любой точке ближней зоны окружающего пространства. Такой обобщенной характеристикой неоднород- ности служит тензор градиента магнитной индукции, представленной матрицей С
9 XX 9 у 9 «
9 у 9 уу 9 yi0)
9 zx 9 гу 9 и
5
0 5
5
0
5
0
5
0
Элементами которой служат пространственные производные КМИ
«I -Л «to
Вследствие потенциального характера магнитостатического поля dlvB- 0 и rot B-0. в связи с чем матрица тензора симметрична и сумма ее диагональных элементов равна нулю. В результате полной характеристикой неоднородности магнитной индукции служат значения пяти независимых элементов матрицы, например. д«. 0ух. д. дуу. д/у.
Матрица G приобретает вид
|9хх дух д ы
GHgyx дуу gzy(3)
I д (- дхх- д уу) .
Приращение ВМИ для точки с координатами S. относительно ВМИ в точке О (начала координат) может быть представлено, с точностью до вторых производных, в виде произведения матрицы G на вектор S ДВ-GS .(4)
В соответствии с этим известным соотношением, ВМИ в точках измерений Bi, 82 и Вз могут быть представлены в виде суммы вектора В (Вх. By и BJ в точке О и приращений Д В, как функции градиента и коорди- .нат.
Поскольку Si- la, Sz-Ja. 5з-0. В1-1 (Bx+gxx аН (Ву +gyx a)+ K(Bz+gzx a) B2-l(Bx+gyxa)+KBy+gyya)+K(Bz+gzya) (5) ВзН Вх +J By t KB.
В соответствии с зависимостями (5). выражения для квадратов модулей измеряемых величин, приведенные в таблице 3. также могут быть представлены в виде функции вектора В, градиента G и расстояния а между ММ (см.табл.4).
После группировки квадратов измеряемых величин в левой части зависимостей, получена система из девяти уравнений, связывающих измеренные величины с неизвестными значениями КМИ Вх, By и Вх и элементов матрицы тензора градиента (см. табл. 5).
Приведенные соотношения служат для описания способа, сущность которого характеризуется следующими операциями и их последовательностью:
1. Измеряют значения этих ортогональных КМИ по сигналам разнесенных в пространстве трех MM. F точках, не лежащих на одной прямой, например, в вершинах равнобедренного прямоугольного треугольника, с одновременной компенсацией в объеме каждого ММ неизмеряемых КМИ по сигналам двух других ММ (операция прототипа, дополненная требованием к нзлимно- му расположению ММ)
2.Аналогичным образом (см.п.1) измеряют в каждой точке две другие ШИ, (операция новая).
3.Измеряют в тех же точках значения модуля ВМИ при нескомпенсированных КМИ (операция новая).
4.Выполняют совместную обработку всей полученной информации: составляют систему линейных уравнений, свободные члены которых включают квадраты измеренных величин, и, решая упомянутую систему уравнений, с учетом известного расстояния между точками измерений, определяют значения трех ортогональных КМИ и пяти независимых элементов тензора градиента магнитной индукции (операция новая).
Подробное содержание операций спо- соба приведено в описании принципа работы одного из конкретных вариантов устройства для его реализации (фиг.2).
Модульные магнитометры 1,2 и 3 выполнены в виде квантовых магнитометров с оптической накачкой самогенерирующего типа и подключенных к их выходам преобразователей частоты и код. На выходах ММ формируются электрические сигналы в виде кодов модуля ВМИ суммы измеряемого магнитного поля и магнитного поля компенсационных колец. С выходов ММ 1,2 и 3 сигналы поступают на входы ЭВМ 12, выполненной в виде микроконтроллера на базе микропроцессорной 580 серии. (Н.Н.Щелкунов, А.П.Дианов. Универсальный одноплатный микроконтроллер. Микропроцессорные средства и системы, М., № 5, 1986 г., с 65-69), а также через преобразователи кодов в силу тока 8, 9 и 10 и блок распределительных устройств 7 в компенсационные кольца X, Y и Z колечных систем 4,5 и 6. Переключение компенсационных колец блоком коммутации 7, а также запоминание кодов измеренных значений ЭВМ 12 осуществляется по сигналам блока синхронизации, также выполненного на основе микропроцессора 580 серии. Программа работы ЭВМ определяется алгоритмами, приведенными в тексте описания и таблицах. В соответствии с программой работы блока синхронизации с его выходов на входы блока коммутации 7 и ЭВМ 12 через фиксированные промежутки времени, определяемые с учетом длительности переходного процесса, поочередно поступают синхроимпульсы, управляющие поочередным переключением компенсационных колец в соответствии с четырьмя режимами, приведенными в табл.1 При первом измерении с помощью блока коммутации 7Л в объеме ММ 1 компенсируют КМИ Ву2 и Bz3
и на выходе ММ 1 формируется сигнал ВХ1, аналогичным образом вдобьеме ММ 2 компенсируют КМИ 6x1 и Вгз и на его выходе 5 формируется сигналлйУ2. в объеме ММ 3 компенсируют КМИ ВХ1 и ВУ2 и на его выходе формируется сигнал 6 гз. После окончания переходного процесса по сигналу блока
0 синхронизации 11, поступающему на синхронизирующий вход ЭВМ, измеренные значения BxirB и В/з заносятся в память ЭВМ и с выхода блока синхронизации на управляющий вход блока коммутации поступает
5 синхроимпульс на очередное переключение компенсационных колец. Аналогичным образом выполняются второе, третье и четвертое измерения, в результате чего в память ЭВМ заносятся двенадцать измеренных
0 значений модуля. После этого по команде блока синхронизации блок коммутации устанавливается в выходную позицию первого измерения, а ЭВМ переключается в режим обработки информации. По програм5 ме, записанной в-памяти ЭВМ,составляется система из девяти линейных уравнений с восемью неизвестными в соответствии с зависимостями .5. Эта переопределенная система уравнений решается на основе
0 метода поименных квадратов, в результате чего на выходе ЭВМ формируются значения кодов КМИ Вх, By и Bz, а также пяти независимых элементов тензора градиента магнитной индукции дхх, дух, gzx, gyy и gzy. На
5 этом цикл измерения завершается и повторяется по сигналам блока синхронизации через заданные интервалы.
Реализация способа повышает точность и расширяет функциональные воз0 можности магнитных измерений.
Действительно, в способе-прототипе точки измерений разнесены в пространстве, что необходимо для исключения взаимного влияния компенсирующих полей. При
5 этом все три КМИ оказываются измерены в разных точках и возникают методические погрешности, обусловленные пространственной неоднородностью магнитного поля. В заявляемом способе благодаря рас0 положению точек измерения не на одной прямой, введению дополнительных операций и совместной обработке всей полученной информации исключаются методические погрешности, обусловленные
5 пространственной неоднородностью магнитного поля,и расширяются функциональные возможности - обеспечиваются измерения тензора градиента магнитной индукции.
Благодаря повышению точности и увеличению объема получаемой информации повышается эффективность магнитной разведки. В частности, становится возможным определение координат источника магнитного поля и его магнитного момента. Для этого достаточно, чтобы в памяти ЭВМ была заложена дополнительная программа для составления и решения системы уравнений магнитной пеленгации.
Формула изобретен ия 1. Способ магнитных измерений, включающий измерение трех ортогональных компонент магнитной индукции тремя разнесенными в пространстве модульными магнитометрами с одновременной компенсацией в объеме каждого модульного магнитометра неизмеряемых компонент магнитной индукции по сигналам двух других модульных магнитометров, отличающийся тем, что, с целью повышения точности, измерения выполняют в точках, не лежащих на одной прямой и отстоящих на заданное расстояние одна от другой преимущественно в вершинах равнобедренного прямоугольного треугольника, дополнительно в каждой из трех точек аналогичным образом последовательно изме- ряют две другие компоненты магнитной индукции, а также значение модуля вектора магнитной индукции, выполняя в целом серию из четырех измерений, проводят совместную обработку результатов измерений с использованием системы линейных уравнений, свободные члены которых включают квадраты измеренных величин, решая данную систему с учетом известных расстояний между точками измерений, определяют зна-
чения трех ортогональных компонент маг нитной индукции и пяти независимых элементов тензора градиента магнитной индукции.
2. Устройство для магнитных измерений, содержащее три размещенных на заданном расстоянии один от другого модульных магнитометра, каждый из которых установлен внутри компенсационной системы из двух взаимно ортогональных компенсационных колец, первый, второй и третий преобразователи кода в силу тока, подключенные к выходам соответствующих модульных магнитометров, отличающееся тем, что в компенсационную систему каждого модульного магнитометра введено третье компенсационное кольцо, образующее систему из трех взаимно ортогональных колец, в устройство введены также блок коммутации, блок обработки и блок синхронизации, при этом первый, второй и третий входы блока коммутации соединены соответственно с выходами первого, второго и третьего преобразователей кода в силу тока, выходы соединены с компенсационными кольцами каждой из трех компенсационных систем, а управляющий вход соединен с выходом блока синхронизации, первый, второй и третий информационные входы блока обработки соединены с выходами первого, второго и третьего модульных магнитометра соответственно, его управляющий вход соединен с выходом блока синхронизации, а выход блока обработки является выходом устройства.


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАГНИТНЫХ ИЗМЕРЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019859C1 |
| СПОСОБ ВЕКТОРНЫХ МАГНИТНЫХ ИЗМЕРЕНИЙ | 1991 |
|
RU2069374C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1980 |
|
SU854155A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ ПАРАМЕТРОВ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1989 |
|
RU2075759C1 |
| СПОСОБ РАЗДЕЛЕНИЯ МАГНИТНЫХ ПОМЕХ НОСИТЕЛЯ МАГНИТОМЕТРА | 1991 |
|
RU2047873C1 |
| Способ измерения компонента вектора магнитной индукции и устройство для его осуществления | 1978 |
|
SU789930A1 |
| Магнитометр | 1980 |
|
SU1053026A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1979 |
|
SU786537A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |

Использование: в области магнитных измерений при геомагнитных поисках и разведке полезных ископаемых и объектов техногенного происхождения. Сущность изобретения: в трех точках, не лежащих на одной прямой, измеряют ортогональные компоненты магнитной индукции (КМИ) пб сигналам модульных магнитометров (ММ) с одновременной компенсацией неизмеряемых КМИ, аналогично в каждой точке измеряют последовательно две другие КМИ и модуль вектора магнитной индукции, проводя в целом серию из четырех измерений. Путем совместной обработки информации определяют три КМИ и пять независимых элементов тензора градиента. Устройство содержит три ММ, три трехкомпонентные колечные системы, блок коммутации, три преобразователя кода в силу тока, блок синхронизации и блок обработки. Компенсационные кольца подключены через блок коммутации и преобразователи кода в силу тока к выходам ММ. 2 с.п. ф-лы, 5 табл 2 ил.
Обозначения измеряемых значений модуля ВМИ и компенсирующих значений КМИ в четырех последовательных сериях измерений
Таблица 1
Таблица 2 Выражения для векторов суммарного магнитного поля при компонентных измерениях
Таблица 3 Выражения для значений квадратов модуля вектора суммарного магнитного поля
Таблица А
Выражения для квадратов модуля вектора суммарного магнитного поля в виде функции
вектора ММ и градиента.
Продолжение таблицы 1
Система уравнений для определения компонент вектора магнитной индукции и элементов
тензора градиента
3
&
Продолжение таблицы 4
Таблица 5
д
Фиг
«ft
| Hardvic C.D | |||
| Important design considerations for Inboard airborne magnetic gradlometers Geophygtcs, 1984, v.45, № 11 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Федоров И.М | |||
| Компонентная магнито- м.етрическая система на основе трех модульных квантовых магнитометров | |||
| В Сб | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
