«
Изобретение относится к геофизик а именно к приборам, используемым РД1Я измерения составляющих модуля полного вектора магнитной индукции поля.Земли как в стационарных усло
виях, так и в условиях морской магнитной съемки, а также к приборам для исследования параметров буксируемых устройств 5 и является усовершенствованием устройства по основно- y авт,св, № 824099.
Цель изобретения - повышение точности измерений путем исключения погрешностей за счет ходовых характеристик гондолы.
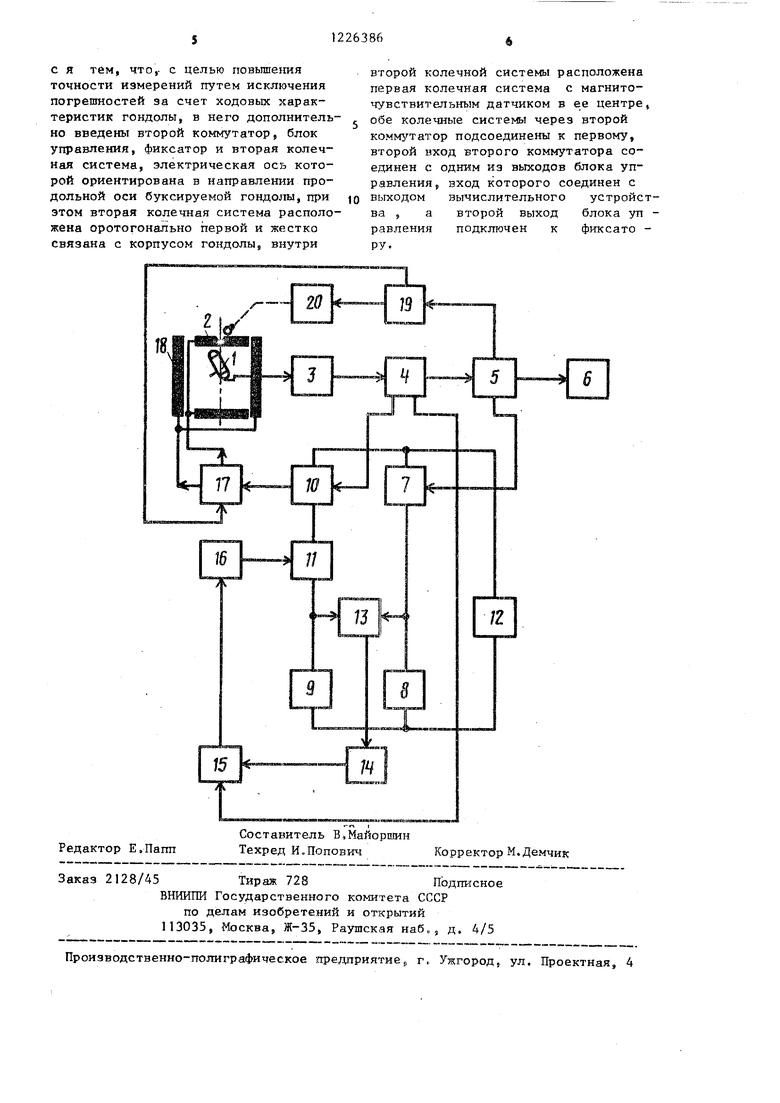
На чертеже приведена блок-схема компонентного магнитометра. Магнитометр состоит из магниточувствител:ьно- го датчика , установленного в центре первой колечной системы 2, формирователя 3 сигналаJ измерите:тьного блока 45 вычислительного устройства
5, регистратора 6, I
В первое ппечо мостовой схемы цепи питания колечных систем, включен блок 7 компенсации, во второе и третье плечи - эталонные сопротивления 3 и 9, а в четвертое плечо схемы последовательно с колечными системами
10
15
20
25
По первой команде с вычислительного устройства 5 с помощью блока 7 компенсации устанавливается в зависимости от района измерений требуемая величина дополнительного магнитного поля В (+).
При этом через ветвь моста, состоящую из блока. 7 компенсации и эталонного сопротивления 8, от источника 12 питания течет TOKj через дру- г ую ветвь моста,; состоящую из первой колечной системы 2, второго коммутатора 17, первого коммутатора 10, регулирующего элемента 11 и эталонного сопротивления 9, также течет ток. При равенстве этих токов напряжения на эталонных сопротивлениях 8 и 9 равны и Е; диагонали моста на входе модулятора 13 разность потенциалов равна нулю. Следовательно ток, протекающий через первую колечную систему 2, создает заданную величину дополнительного поля В (+). Магниточувстви- тельный датчик .1 фиксирует суммарное результирующее поле, действующее на датчик. С помощью последнего и формирователя 3 сигнала результирующее значение магнитной индук.ции В преоб- . разуется в частотный сигнал и подает35
включены первый коммутатор 10 и рагу- ся на измерительный блок 4, Измерен- лирующий элемент 11. Мостовая схема подключена к высокостабилизироваи-шо- му источнику 12 питания, В диагональ моста включен модулятор 13. Выход модулятора через усилитель 14 рассогласования подклю чен к одному из входов синхронного детектора 15, второй вход которого также соединен с измерительным блоком,
К выходу синхронного детектора через усилитель 16 постоянного тока подключен регулирующий элемент. Вход второго коммутатора 17 последовательно соединен с выходом первого коммутатора, а выходы второго коммутатора подключены к второй колечной системе 18 и первой колечной системе. Один яз управляющих выходов вычислительного устройства подан на вход блока 19 управления, один из выходов которого соединен с вторым коммутатором, а другой выход - с входом фиксатора 20, Рабочий орган фиксатора имеет возможность механически, посредством дву плечевого рычага, стопорить первую колечную систему.
Магнитометр работает следующим образам.
нов значение В подается в оперативную па мять вычислительногб устройства 5, где оно и хранится до следующего цикла измерений. После измерения результирующего значения магнитной индукции В, измерительный блок выдает команду на первый коммутатор Ш на изменение знака тока компенса.- цииэ т.е. на изменение направления дополнительного поля в первой колечной системе. При: реверсе (изменении направления) тока в колечной системе, за счет изменения переходного со- щ)отивления ком(1утирующих контактов первого комг-гутатора 10 или других дестабилизирующих факторов (например, изменение сопротивления колечной системы от температуры) появляется разбаланс в диагонали моста, т.е, появляется разность потенциалов На входе модулятора 13, С помощью модулятора постоянное напряжение рассогласования (напряжение разбаланса) преобразуется в переменное, 55 усиливается усилителем 14 рассогласования и подается на синхронный детектор 15, Синхроимпульсы для модуляции и демодуляции одновременно по50
5
0
5
По первой команде с вычислительного устройства 5 с помощью блока 7 компенсации устанавливается в зависимости от района измерений требуемая величина дополнительного магнитного поля В (+).
При этом через ветвь моста, состоящую из блока. 7 компенсации и эталонного сопротивления 8, от источника 12 питания течет TOKj через дру- г ую ветвь моста,; состоящую из первой колечной системы 2, второго коммутатора 17, первого коммутатора 10, регулирующего элемента 11 и эталонного сопротивления 9, также течет ток. При равенстве этих токов напряжения на эталонных сопротивлениях 8 и 9 равны и Е; диагонали моста на входе модулятора 13 разность потенциалов равна нулю. Следовательно ток, протекающий через первую колечную систему 2, создает заданную величину дополнительного поля В (+). Магниточувстви- тельный датчик .1 фиксирует суммарное результирующее поле, действующее на датчик. С помощью последнего и формирователя 3 сигнала результирующее значение магнитной индук.ции В преоб- . разуется в частотный сигнал и подает
ся на измерительный блок 4, Измерен-
нов значение В подается в оперативную па мять вычислительногб устройства 5, где оно и хранится до следующего цикла измерений. После измерения результирующего значения магнитной индукции В, измерительный блок выдает команду на первый коммутатор Ш на изменение знака тока компенса.- цииэ т.е. на изменение направления дополнительного поля в первой колечной системе. При: реверсе (изменении направления) тока в колечной системе, за счет изменения переходного со- щ)отивления ком(1утирующих контактов первого комг-гутатора 10 или других дестабилизирующих факторов (например, изменение сопротивления колечной системы от температуры) появляется разбаланс в диагонали моста, т.е, появляется разность потенциалов На входе модулятора 13, С помощью модулятора постоянное напряжение рассогласования (напряжение разбаланса) преобразуется в переменное, 5 усиливается усилителем 14 рассогласования и подается на синхронный детектор 15, Синхроимпульсы для модуляции и демодуляции одновременно по0
даются от измерительного блока на модулятор и синхронный eтeктop. С выхода синхронного детектора напряжение, пропорциональное величине рассогласования в диагонали моста, подается-на усилитель 16 постоянного тока, который управляет регулирующим элементом 11, Регулирующий элемент, в зависимости от знака и величины рассогласования в диагонали моста, увеличивает или уменьшает величину тока , протекающего через первую ко- лечную систему. Следовательно, теперь с помощью первой колечной системы создается дополнительное поле В (-), строго равное дополнительному полю Ва () , но противоположного направления. Теперь измерительный канал магнитометра (датчик, формирователь сигнала, измерительный блок) фикси- рует результирующее значение магнитной индукции В и подает измеренное его значение в память вычислительного устройства 5, После измерения В, измерительный блок вьщает команду на первый коммутатор 10 на отключение тока компенсации. Измерительный канал магнитометра фиксирует значение модуля полного вектора магнитной индукции В и подает его измеренное значение в память вычислительного устройства. По измеренным значениям В,, В и В вычислительное устройство определяет значения вертикальной и горизонтальной составлякяцих магнит ного поля Земли (МПЗ) в заданный момент времени и результаты вычисления записывают в свое оперативно-запоминающее устройство.
По второй команде с вычислительно го устройства 5 блок 19 управления с помощью второго коммутатора 17 отключает первую колечную систему 2 и подключает к работе вторзто колечную систему 18, жестко связанную с корпу сом гондолы. Одновременно с второй командой вырабатывается первая команда и магнитометр начинает работать по описанной схеме, только теперь дополнительное поле создается с по- мощью второй колечной системы и ориентировано в направлении движения гондолы. После измерений модулей В,, В,., и Б вычислительное устройство определяет магнитный курс и рыскание гондолы, вычисленные значения указанных параметров хранятся в памяти вычислительного устройства.
5 0 5 0 5
0 5 0 5
0
5
По третьей команде с вычислительного устройства 5 блок 19 управления с помощью второго коммутатора I отключает вторую колечную систему 18 и подключает к работе первую колечную систему. Одновременно по третьей команде блок управления выдает командный сигнал на фиксатор 20, который с помощью рабочего органа жестко относительно корпуса гондолы фиксирует первую колечную систему 2 в вертикальном направлении. Измерительный блок по третей команде с помощью первого коммутатора 10 подключает блок 7 компенсации к первой колечной системе, при этом с помощью блока компенсации устанавливают такой ток компенсации, который с помощью первой колечной системы создает дополнительное поле, равное по величине вычисленному значению вертикальной составляющей В, но противоположное по направлению. Измерительный канал магнитометра регистрирует суммарное значение горизонтальной составляющей в , промодулированное угловыми колебаниями буксируемой гондолы. При этом амплитуду колебаний гондолы в единицах Измерения магнитной индукции вычислительное устройство 5 определяет согласно выражению
ДВ„ В - В,
где В,
- н
- значение горизонтальной составляющей МПЗ, определенное ранее до стопорения первой колечной системы.
В дальнейшем в зависимости от курса буксирования гондолы вычислительное устройство определяет все угловые характеристики гондолы, т.е. определяет крен и дифферент. Анализируя все полученные ходовые параметры гондолы оператор, используя вычислительное устройство, может в зависимости от реальных условий буксировки оптимизировать режим измерения (время осреднения, быстродействие, курс движения и т.д.), скорректировать полученные результаты измерения составляющих с учетом реальных ходовых характеристик буксируемой гондолы и существенно повысить точность измерения составляющих МПЗ.
Формула изобретения
Компонентный магнитометр по авт. св. № 824099, отличающийс я тем, что,- с целью повьше1гая точности измерений путем исключения погрешностей за счет ходовых характеристик гондолы, в него дополнительно введены второй коммутатор, блок управления, фиксатор и вторая колеч- Ная система, электрическая ось которой ориентирована в направлении продольной оси буксируемой гондолы, П1)и этом вторая колечная система расположена оротогонально первой и жестко связана с корпусом гондолы, внутри
второй колечной системы расположена первая колечная система с магнито- ч вствительным датчиком в ее центре t обе колечные системы через второй коммутатор подсоединены к первому, второй нход второго коммутатора со- е;з;инен с одним из выходов блока управления, вход которого соединен с выходом вычислительного устройства , а второй выход блока уп - равления подключен к фиксато - РУ.
Редактор Е.Папп
Составитель В,Майоршин Техред И.Попович
Заказ 2128/45 Тираж 728Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская Ha6,,j д. 4/5
Производственно-полиграфическое предприятиер г. Ужгород,, ул. Проектная, 4
Корректор М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| Квантовый компонентный магнито-METP | 1979 |
|
SU819778A1 |
| КВАНТОВЫЙ КОМПОНЕНТНЫЙ МАГНИТОЛ\ЕТР | 1973 |
|
SU382989A1 |
| Способ магнитных измерений и устройство для его осуществления | 1991 |
|
SU1824612A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ МАГНИТОМЕТРА | 2008 |
|
RU2386141C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| Магнитометр | 1980 |
|
SU1053026A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
Изобретение относится к области геофизики и может быть использовано при измерениях составляющих модуля полного вектора магнитной индукции поля Земаи как в стационарных условиях, так и с буксируемых устройств. Цель изобретения - повышение точности измерений путем исключения погреш- ностей за счет ходовых характеристик гондолы. Поставленная цель достигается за счет запоминания измеряемого значения модуля магнитного поля Земли, создания дополнительного магнитного поля, равного измереннс« у, и измерения в последующий момент времени магнитного поля, равного разнос ти значений модуля магнитного поля, измеряемого в текущий ж)мент времени и запомненного значения магнитного поля. Вычисление компонент осуществляется вычислительным устройством прибора по значениям величин магнит- Щ ных полей, измеренного в текущий момент времени, запомненного значения и их разности. 1 ил. сл ю го Од со СХ О
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
