1
Изобретение предназначено для контроля за положением уточных нитей в ткани и автоматического управления смещения пеней, исправляющих перекосы утка в ткани, например, на сушильно-щирильных мащинах отделочного производства в текстильной промышленности.
Известен автомат правки утка, содержащий датчик положения утка, выполненный в виде челнообразного uiyna, преобразователь сигнала, электроуправляющий блок и исполнительное устройство.
Однако этот автомат не надежен в работе, датчик проваливается в обрывы ткани, вызывая порчу ее, обладает пониженной чувствительностью, не успевает следить за расположением уточных нитей по ширине ткани.
С целью повышения чувствительности и надежности в работе нри больших скоростях движения ткани предлагаемый автомат снабжен ограничителями угла поворота и нижнего положения датчика, соединенными с преобразователем сигнала через демпферное устройство.
Датчик установлен в параллельных боковых тягах, а ограничитель угла новорота н нижнего положения его выполнен в виде нланки, имеющей возможность контакта со щупом при отсутствии ткани.
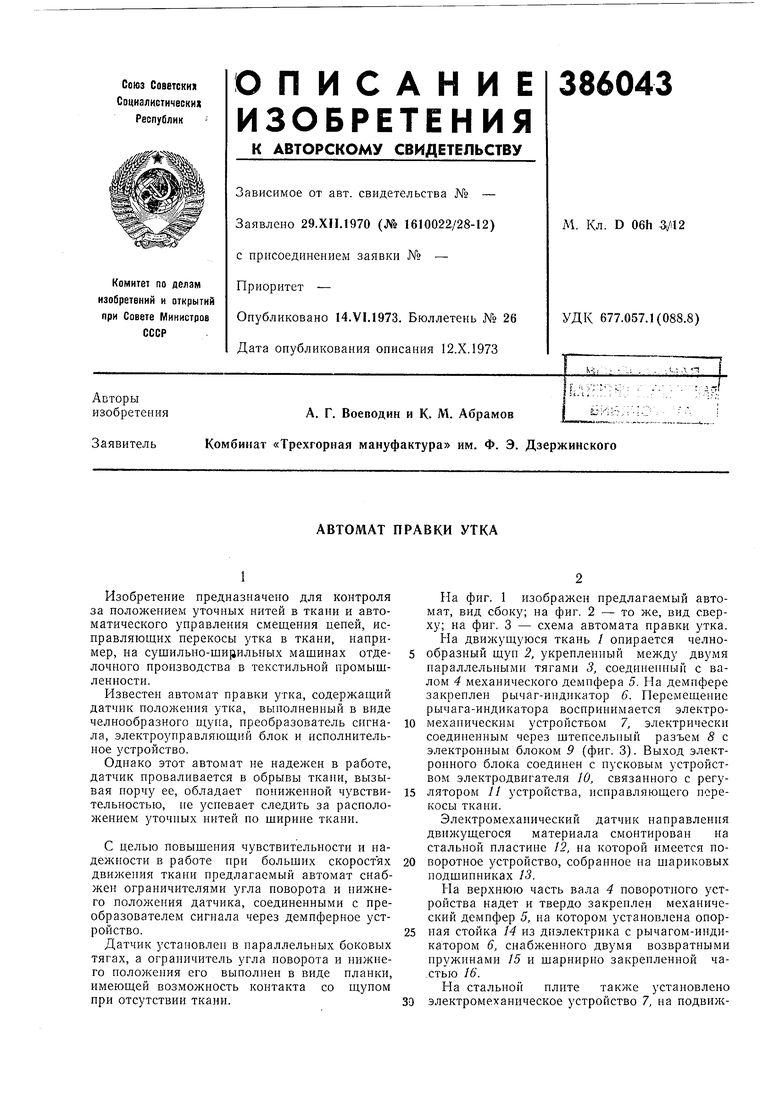
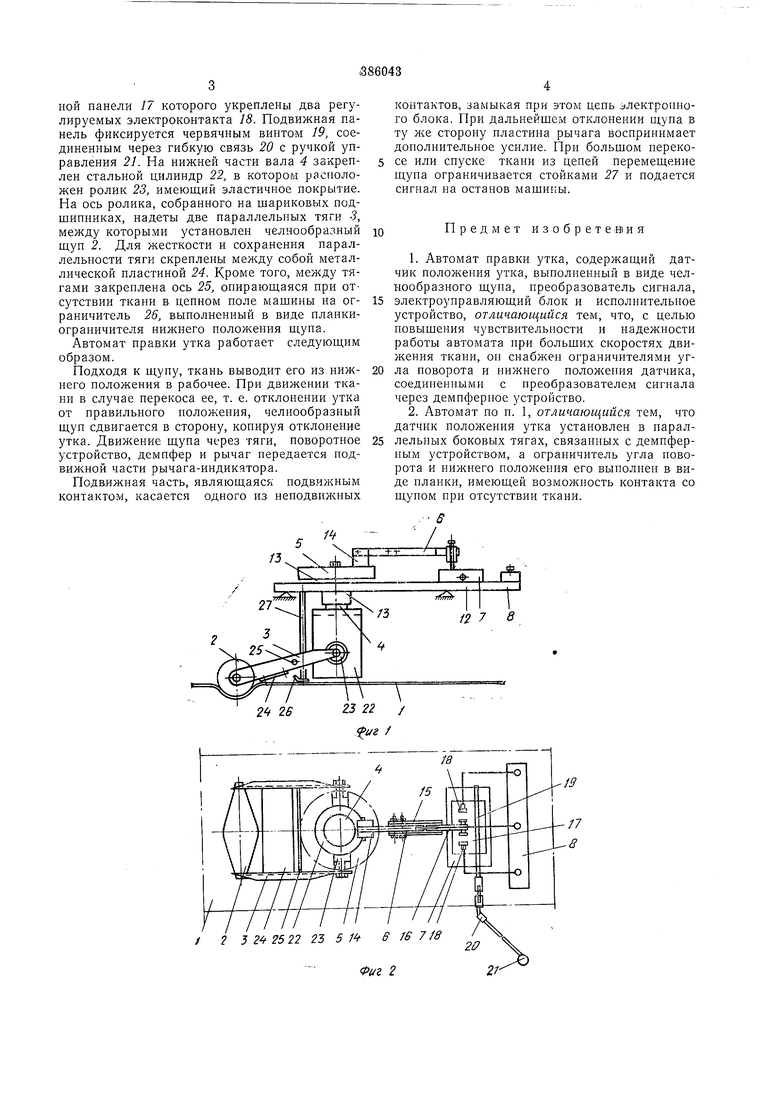
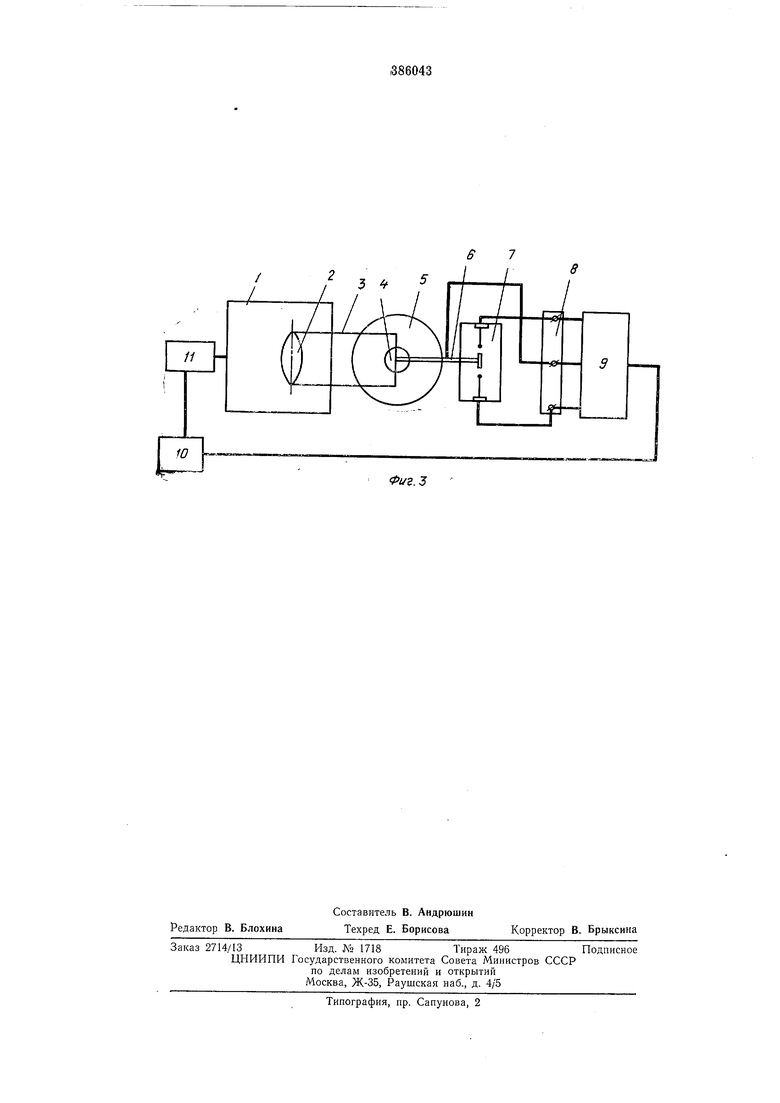
На фиг. 1 изображен предлагаемый автомат, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема автомата правки утка. На движущуюся ткань / опирается челнообразный щун 2, укрепленный между двумя нараллельнымн тягами 3, соединенный с валом 4 механического демпфера 5. На демпфере закреплен рычаг-индикатор 6. Перемещение рычага-индикатора воспринимается электромеханическим устройством 7, электрически соединенным через штепсельный разъем 8 с электронным блоком 9 (фиг. 3). Выход электронного блока соединен с пусковым устройством электродвигателя 10, связапного с регулятором 11 устройства, исправляющего перекосы ткани.
Электромеханический датчик направления движущегося материала смонтирован на стальной пластипе 12, на которой имеется поворотное устройство, собранное на щариковых нодщипниках 13.
Fla верхнюю часть вала 4 поворотного устройства надет и твердо закренлен механический демпфер 5, на котором установлена опорпая стойка 14 из диэлектрика с рычагом-индикатором 6, снабженного двумя возвратными нружинами 15 и шарнирно закрепленной частью 16.
На стальной плпте также установлено
электромеханическое устройство 7, на подвиланой панели 17 которого укреплены два регулируемых электроконтакта 18. Подвижная панель фиксируется червячным винтом 19, соединенным через гибкую связь 20 с ручкой управления 21. На нижней части вала 4 закреплен стальной цилиндр 22, в котором расположен ролик 23, имеющий эластичное покрытие. На ось ролика, собранного на шариковых подшипниках, надеты две параллельных тяги , между которыми установлен челнообразный шуп 2. Для жесткости и сохранения параллельности тяги скреплены между собой металлической пластиной 24. Кроме того, между тягами закреплена ось 25, опираюш,аяся при отсутствии ткани в цепном поле машины на ограничитель 26, выполненный в виде планкиограничителя нижнего положения utyna.
Автомат правки утка работает следуюш,им образом.
Подходя к ш.упу, ткань выводит его из нижнего положения в рабочее. При движении ткани в случае перекоса ее, т. е. отклонении утка от правильного положения, челнообразный ш,уп сдвигается в сторону, копируя отклонение утка. Движение щупа через тяги, поворотное устройство, демпфер и рычаг передается подвиншой части рычага-индикатора.
Подвижная часть, являющаяся подвижным контактом, касается одного из неподвижных
/ 5 4 5 22 23 5 /4- В 16 7 f8
контактов, замыкая при этом цепь электронного блока. При дальнейшем отклонении в ту же сторону пластина рычага воспринимает дополнительное усилие. При большом перекосе или спуске ткани из цепей перемещение щупа ограничивается стойками 27 и подается сигнал на останов машины.
Предмет изобретееия
1.Автомат правки утка, содержащий датчик положения утка, выполненный в виде челнообразного щуна, преобразователь сигнала,
электроунравляющий блок и исполнительное устройство, отличающийся тем, что, с целью новыщения чувствительности и надежности работы автомата нри больших скоростях движения ткани, он снабжен ограничителями угла поворота и нижнего положения датчика, соедрн1енными с преобразователем сигнала через демпферное устройство.
2.Автомат но п. 1, отличающийся тем, что датчик положения утка установлен в параллельных боковых тягах, связанных с демпферным устройством, а ограничитель угла поворота и нижнего положения его выполнен в виде планки, имеющей возможность контакта со шуном при отсутствии ткани.
20
Фиг 2
2Г
6 7
Фиг.З