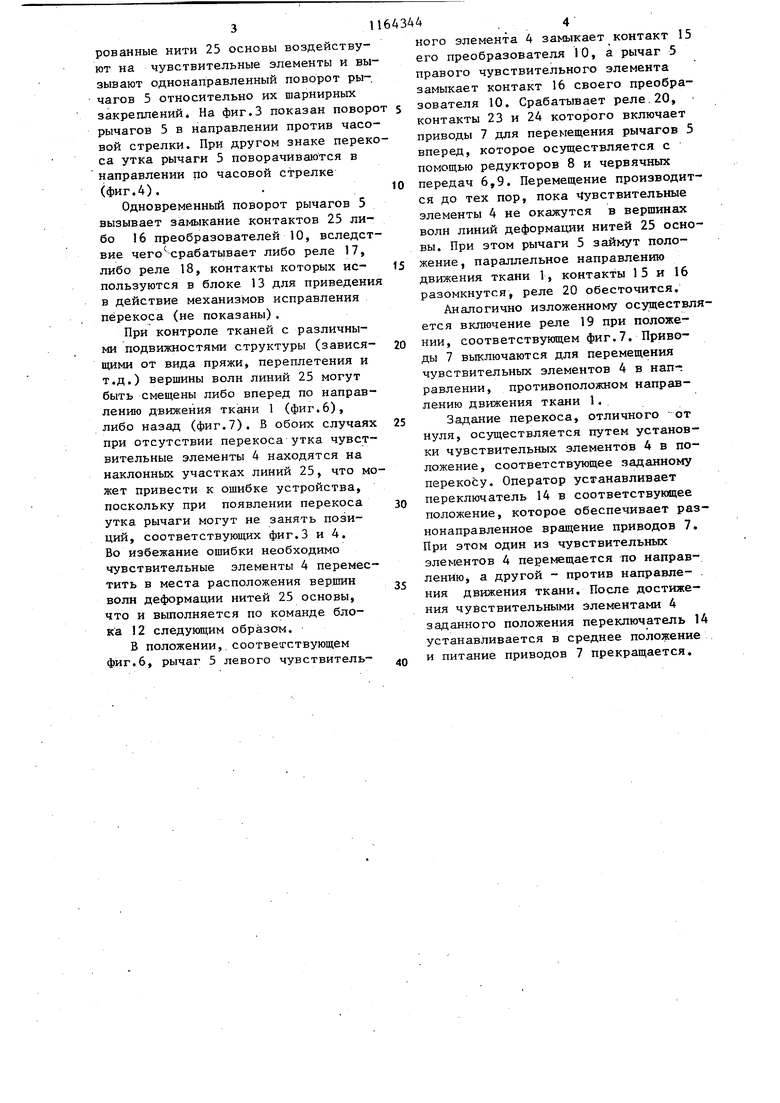
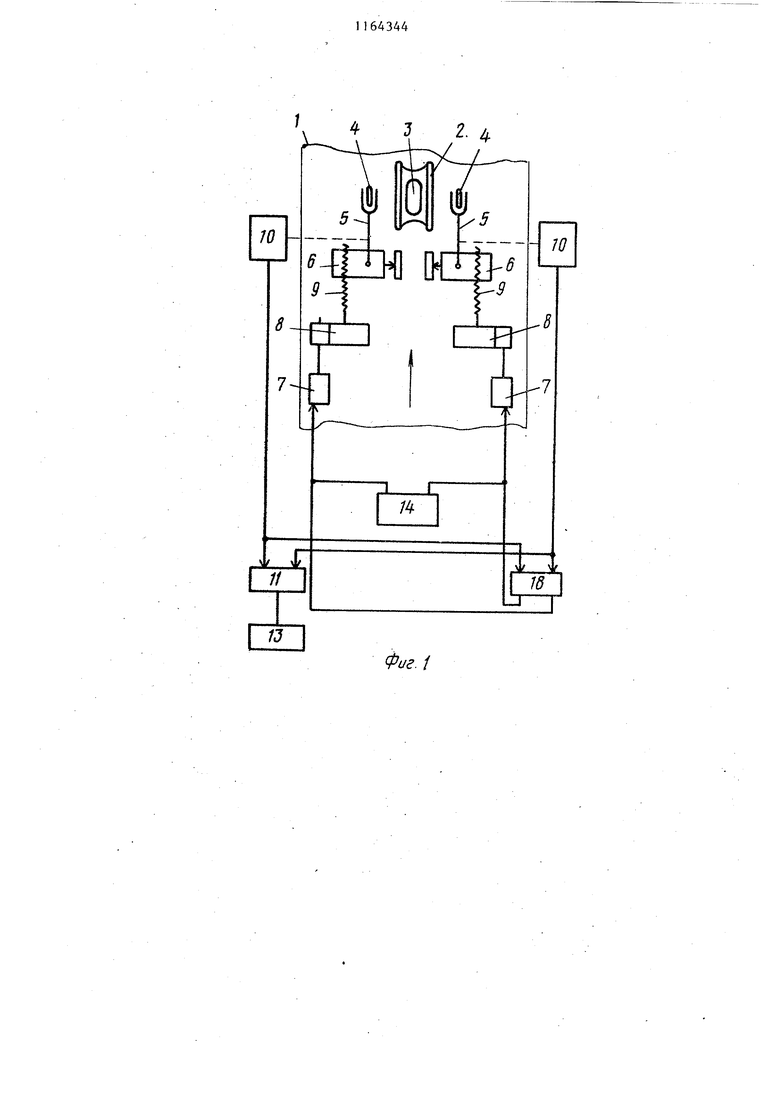
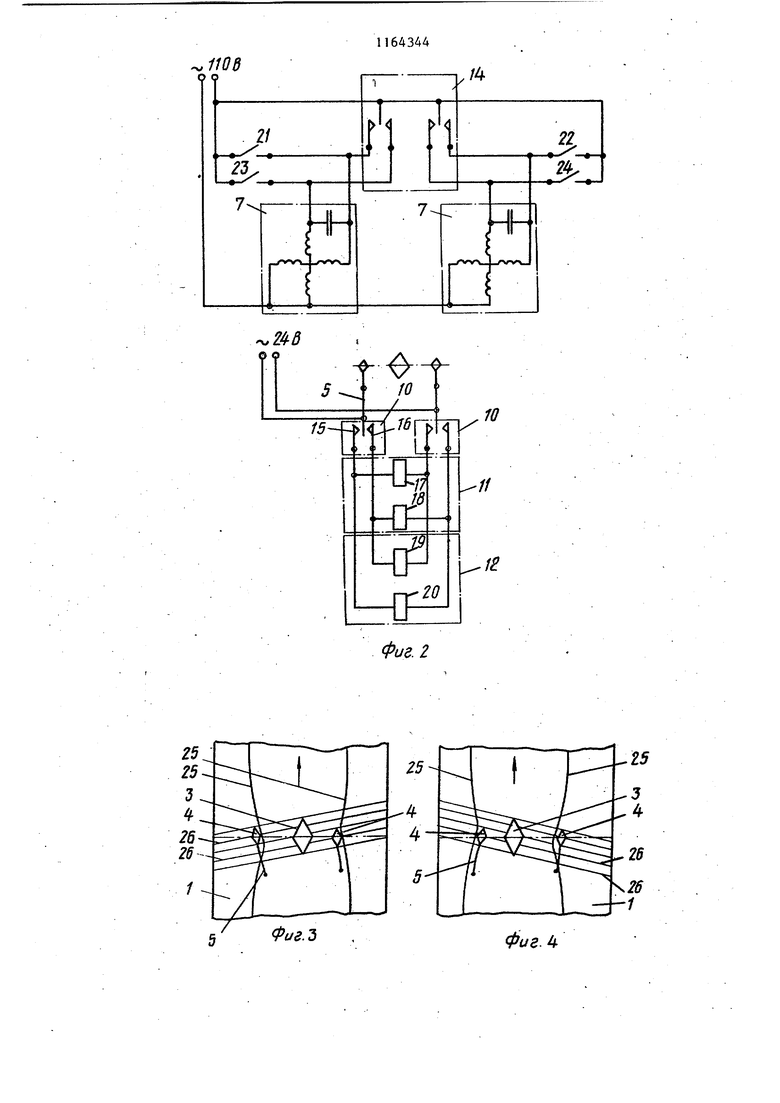
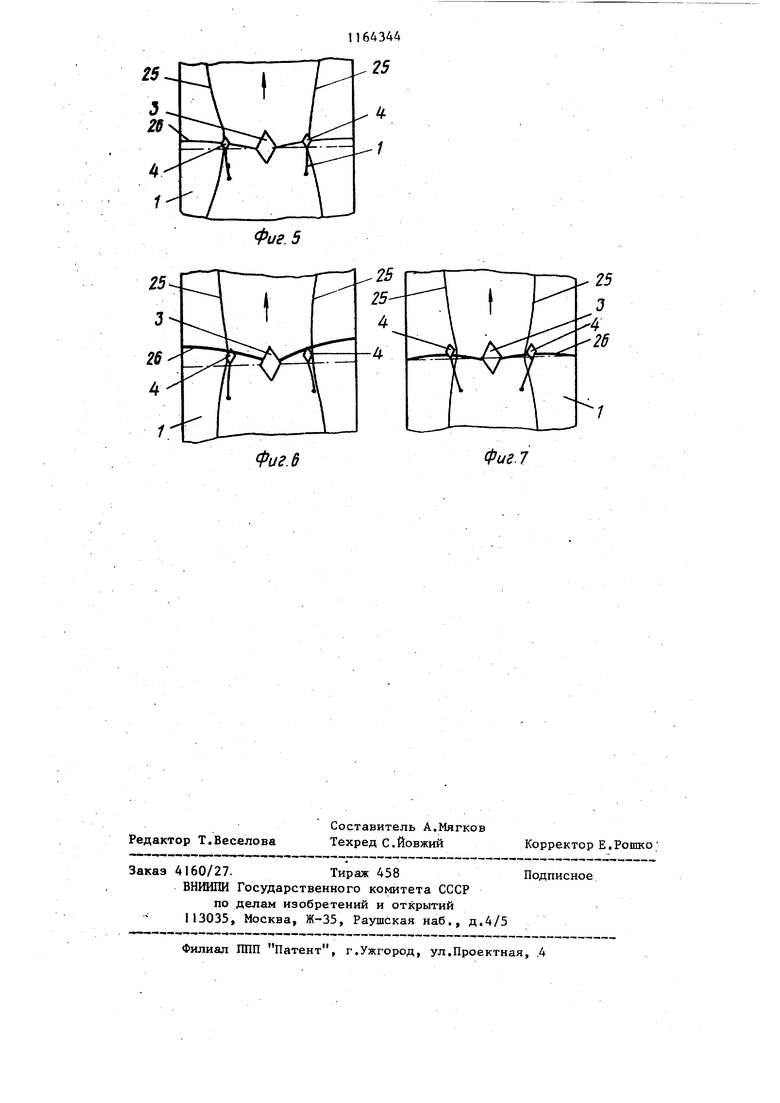
Изобретение относится к текстиль ной промышленности и может быть использовано в устройствах для устранения перекоса утка движущейся ткани. Целью изобретения является повы шений точности контроля перекоса утка путем учета изменений физических свойств ткани. На фиг.1 представлена структурна схема устройства; на фиг, 2 - принципиальная схема устройства на фиг. 3 и 4 - положения чувствительных элементов при перекосах утка ра личного направления; на фиг. 5 -. положения чувствител ных элементов при отсутствии перекоса утка и расположениях линии деформации основы по точкам касания ткани искажающих роликов и чувствительных элементов на фиг. 6 - то же, сдвинутой вперед по направлению движения ткани; на фиг. 7 - то же, сдвинутой назад относительно направления движения ткани. Устройство для контроля перекоса утка ткани содержит деформирующий ткань элемент, выполненный в виде размещенных с противоположных сторон ткани 1 роликов 2 и 3. По обеим сторонам от роликов 2 и 3 на равных расстояниях от них размещены чувствительные элементы в виде колес 4, установленных для контакта с тканью I на рычагах 5, шарнирно связанных с гайками 6 средства установки положения чувствительных элементов, включающего также реверсивные приводы 7,через р дукторы 8 и винты 9 обеспечивающие пе ремещение гаек 6 вдоль траектории движения ткани I. Рычаги 5 кинематически связаны с преобразователями 10 поворота в электрический сигнал. Преобразователи 10 подключены к соответствующим входам блока II обнаружения перекоса утка и блока 12 обнаружения изменения подвижности структуры ткани. Выход блока 11 соединен с блоком 13 управления правкой утка, а выходы блока 12 связаны с соответствующими выходами средства 14 задания перекоса утка и вход ми соответствующих реверсивных при водов 7. Каждый преобразователь 10 поворота в электрический сигнал выполнен в виде элекцрических контактов 15 и 16 (фиг.2), установленных для замыкания рычагом 5 при повороте его в соответствующем направлении. Блок 11 обнаружения перекоса утка выполнен в виде реле 17 и 18. Катушка реле 17 подключена к контактам 15 преобразователей 10, а катушка реле 18 - к контактам 16 преобразователей 10. Блок 12 обнар5шения подвижности структуры ткани выполнен. в виде реле 19 и 20. Катушка реле 19 подключена к контакту 15 первого преобразователя 10 и к контакту 16 второго преобразователя 10. Катушка реле 20 подключена к контакту 16 первого преобразователя 10 и к контакту 15 второго преобразователя 10. Средство 14 задания перекоса утка выполнено в виде трехпозиционного переключения, выходы которого параллельно контактам 21 и 22 реле 19 и контактам 23и 24 реле 20 подключены к обмоткам реверсивных приводов 7. Позициями 25 и 26 обозначены соответственно основные и уточные нити ткаци 1. Устройство работает,следуюпщм образом. Верхний ролик 3 дифференцирующего элемента под действием собственного веса прогибает ткань 1 в зоне выемки нижнего ролика вследствие 2, чего ткань в зоне роликов 2 и 3 деформируется. При движении ткани без перекоса утка (фиг.51 вершины линий деформа.дии нитей 25 основы расположены на линии, соединяющей чувствительные элементы 4 и ролики 2 и 3. Поскольку касательные к вершинам линий деформации нитей 25 основы параллельны направлению движения ткани, рычаги 5 с чувствительными элементами 4 также расположены параллельно направлению движения ткани,. При этом все реле блоков 11 и 12 (фиг.2) отключены, так как ни один из контактов 15 и 16 не замкнут. Возникновение перекоса утка (фиг.З и 4) вызывает смещение вершин линий деформации нитей 25 основы. Это приводит к тому, что чувствительные элементы 4 располагаются на нак тонных участках линий 25. Деформи- рованные нити 25 основы воздействуют на чувствительные элементы и вы зывают однонаправленный поворот рычагов 5 относительно их шарнирньпс закреплений. На фиг.З показан пово рычагов 5 в направлении против часо вой стрелки. При другом знаке пере са утка рычаги 5 поворачиваются в направлении по часовой стрелке (фиг.4),. Одновременный поворот рычагов 5 вызывает за14ыкание контактов 25 либо 16 преобразователей 10, вследст вие чего срабатывает либо реле 17, либо реле 18, контакты которых используются в блоке 13 для приведени в действие механизмов исправления перекоса (не показаны), При контроле тканей с различными подвижностями структуры (зависящими от вида пряжи, переплетения и т.д.) вершины волн линий 25 могут быть смещены либо вперед по направлению движения ткани 1 (фиг.6), либо назад (фиг.7). В обоих случаях при отсутствии перекоса утка чувствительные элементы 4 находятся на наклонных участках линий 25, что мо жет привести к ошибке устройства, поскольку при появлении перекоса утка рычаги могут не занять позиций, соответствующих фиг.З и 4. Во избежание ошибки необходимо чувствительные элементы 4 переместить в места расположения вершин волн деформации нитей 25 основы, что и выполняется по команде блока 12 следующим образом. В положении,. соответствующем фиг.6, рычаг 5 левого чувствитель- ного элемента 4 замыкает контакт 15 его преобразователя 10, а рычаг 5 правого чувствительного элемента замыкает контакт 16 своего преобразователя 10. Срабатывает реле,20, контакты 23 и 24 которого включает приводы 7 для перемещения рычагов 5 вперед, которое осуществляется с помощью редукторов 8 и червячных передач 6,9. Перемещение производится до тех пор, пока Чувствительные элементы 4 не окажутся в вершинах волн линий деформации нитей 25 основы. При этом рычаги 5 займут положение , параллельное направлению движения ткани 1, контакты 15 и 16 разомкнутся, реле 20 обесточится. Аналогично изложенному осуществляется включение реле 19 при положении, соответствующем фиг.7. Приводы 7 выключаются для перемещения чувствительных элементов 4 в направлении, противоположном направлению движения ткани 1. Задание перекоса, отличного -от нуля, осуществляется путем установки чувствительных элементов 4 в положение, соответствующее заданному перекосу. Оператор устанавливает переключатель 14 в соответствующее положение, которое обеспечивает разнонаправленное вращение приводов 7. При этом один из чувствительных элементов 4 перемещается по направлению, а другой - против направле- . ния движения ткани. После достижения чувствительными элементами 4 заданного положения переключатель 1Д устанавливается в среднее положение и питание приводов 7 прекращается.
4 J 2. 4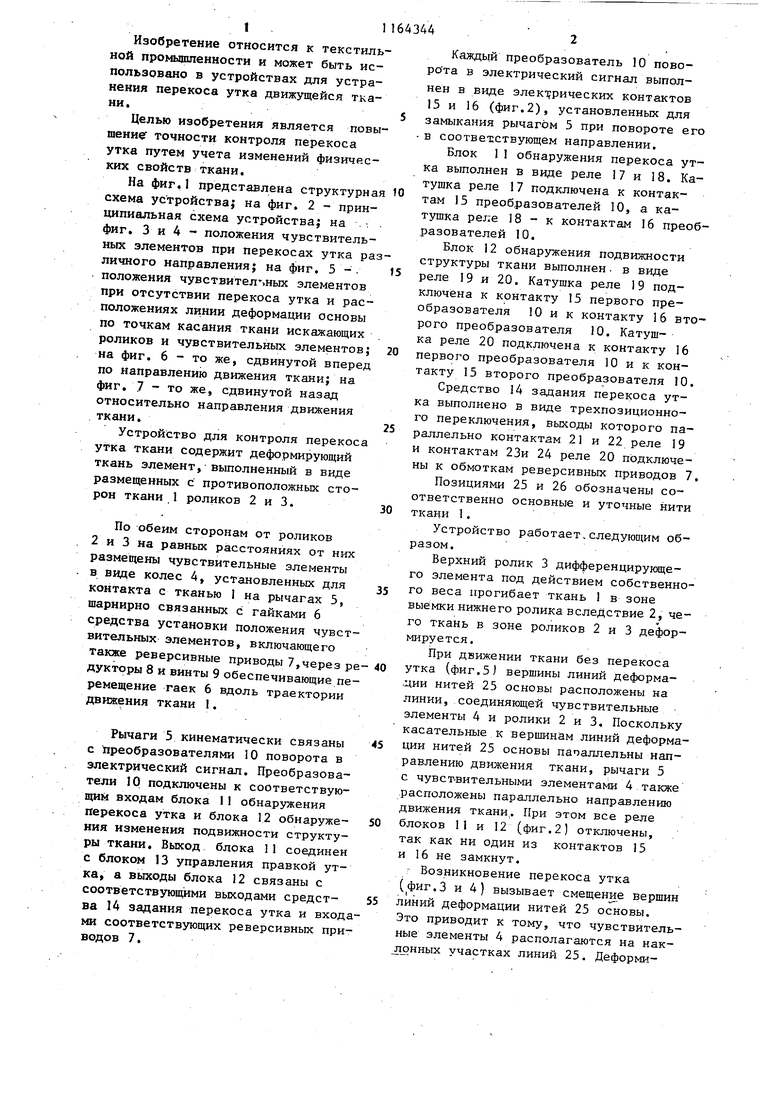
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ устранения перекоса ткани на сушильно-ширильной машине | 1980 |
|
SU1006558A1 |
| Датчик перекоса утка ткани | 1974 |
|
SU679669A1 |
| Устройство для измерения перекоса уточных нитей | 1974 |
|
SU483473A1 |
| АВТОМАТ ПРАВКИ УТКА | 1973 |
|
SU386043A1 |
| Устройство для контроля перекоса уточных нитей в ткани | 1990 |
|
SU1747557A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и ИСПРАВЛЕНИЯ ПЕРЕКОСОВ УТКА В ТКАНИ НА ЗАПУСКЕ В МАШИНЫ ОТДЕЛОЧНОГО | 1968 |
|
SU212221A1 |
| Устройство для определения плотности ткани | 1985 |
|
SU1382887A1 |
| СПОСОБ РАЗРЕЗАНИЯ И ЗАКРЕПЛЕНИЯ КРОМКИ ТКАНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011716C1 |
| Устройство для устранения перекоса уточных нитей ткани | 1949 |
|
SU88915A1 |
| Машина для ширения и сушки текстильного полотна | 1983 |
|
SU1121336A1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРЕКОСА УТКА ТКАНИ, содержащее деформирующий ткань элемент, расположенные симметрично относительно него чувствительные элементы, установленные с возможностью контактирования с тканью и закрепленные на .рычагах, шарнирно связанных со средство установки положения чувствительных элементов и снабженных преобразователями поворота рычага в электричес кий сигнал, подключенными к соответствующим входам блока обнаружения перекоса утка, соединенного с входом блока управления правкой угла, и средство задания перекоса утка, отличающееся тем, что, с целью повышения точности контроля перекоса утка путем учета изменений физических свойств ткани, оно имеет блок обнаружения изменения подвижности структуры ткани, а средство установки положения чувствительных элементов выполнено в виде червячных передач с реверсивным приводом, кинематически связанных с соответствующими рычагами для перемещения чувствительных .элементов параллельно направлению движения ткани, при этом преобразователи, поворота рычага в электрический сигнал подключены дополнительно к соответствующим входам блока обнаружения изменения подвижности структуры ткани, выходы которого соединены с соответствующими реверсивными приводами червячных передач к соответствующими выходами средства задания перекоса утка. 2.Устройство по п.1, о т л и чающееся тем, что каждый преобразователь поворота рычага в электрический сигнал выполнен ввиде контактов, установленных для замыкания рычагом при повороте их в соответствующем направлении, а блок обнаружения изменения подвижности структуры ткани выполнен в виде реле, катушки которых подключены к контактам преобразователей поворота рычага в ОАЭ электрический сигнал, фиксирующих jSb противоположные углы наклона рычаi4 гов. 3.Устройство по п,1, о тл и чающееся тем, что средство задания перекоса утка выполнено в виде трехпозиционного переключателя.
фиг. 2
-25
3
-4 -26
Риг 6
фиг.7
| Датчик перекоса утка ткани | 1974 |
|
SU679669A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
