1
Изобретение относится к области автоматизации управления контурны-м перемещением рабочих органов автоматических устройств и предназначено для использования в системах числового программного управления.
Известные интерполяторы, содержащие магнитное олеративное запоминающее устройство с регистром числа и регистром адреса; дешифратор, схему сравнения и анализа координат, регистр команд, один из выходов которого соединен со входом блока переключения квадрантов, соответствующие выходы которого соединены с)егистром знако1В координат и оценочных функций и с регистром состояний; блок конца интерполирования, соединенный с блоком Временной диаграммы интерполятора; блок унитарных кодов, выходы которого соединены с управляющими входами однофазного сумматора модификации координаты и сумматора вычисления оценочной функции; блок приоритетов автоматических устройств, блок связи с ЭВМ, блок управляющих сигналоп устройств ввода и устройства ввода информации с операционного носителя.
Недостатком этих интерполяторов является необходимость применения -больщого количества электронной и электромеханической аплар атуры и малый коэффициент ее использоеатаия.
Отличие описываемого интерполятора заключается в том, что он содержит блок коммутации слагаемых, блок коммутации результатов сложения, блок коммутации унитарных кодов и блок коммутации управляющих сигналов устройств ввода, причем управляемые входы блока коммутации слагаемых, регистра команд, регистра знаков координат и оценочных функций, регистра состояний, схемы сравнения и анализа координат и регистра числа соединены с выходами усилителей магнитного оперативного запоминающего устройства; выходы схемы сравнения и анализа координат соединены с соответствующими входами регистра состояний, выходы блока связи с ЭВМ, устройств ввода информации, регистра команд, регистра знаков координат и оценочных функций, регистра состояний соединены с управляемыми входами регистра числа; ЕЛЬХОДЫ блока ком.мутации результатов сложения соединены со входами регистра числа и регистра знаков координат и оценочных функций, входы одноразрядных сумматоров модификации координат и вычислений оценочной функции соединены ,с соответствующими выходами блока коммутации слагаемых, а выходы - с соответствующими входами блока коммутации результатов сложения, причем управляющие входы блока коммутации слагаемых и блока коммутации результатов сложения соединены с соответствующими выходами блока унитарных кодов, входы регистра адреса соединены с выходами блока приоритетов, а выходы - со входами дешифратора, .который соединен с соответствующими входами блока временной диаграммы, выходы последнего соединены с управляющими входами регистра команд, регистра знаков координат и оценочных функций, регистра состояний, регистра числа, блока пространственного интерполирования, блока конца интерполирования, блока переключения квадрантов и блока унитарных кодов, соединенного со входами блока коммутации ун-итарных кодов, выходы .которого соединены со -входами блоков управления приводами;рабоч их органов автоматических устройств, а управляющие входы блока коммутации унитарных кодов, блока связи с ЭВМ и блока коммутации управляющих сигналов устройств ввода соединены с выходами блока приоритетов, входы -которого соединены с выходами автоматических устройств, выходами блока «онца интерполирования и блОка временной диаграммы; выходы блока пространственного интерполирования соединены со входами блока конца интерполирования и со входами регистра команд, а входы - с выхода-ми регистра состояний и регистра команд, выходы блока ,конца интерполирования соединены со входами регистра состояний, а входы- с регистром команд и регистром состояний; соответствующие выходы блока временной диаграммы соединены со входами блока связи с ЭВМ, блока коммутации слагаемых, регистра адреса, магнитного оперативного запоминающего устройства и блока управляющих сигналов устройств ввода, выходы которого соединены со входами блока коммутации управляющих сигналов устройств ввода, а выходы последнего соединены с управляющими входами устройств ввода информации.
Это позволяет повысить производительность интерполятора и эффективность использования его оборудования.
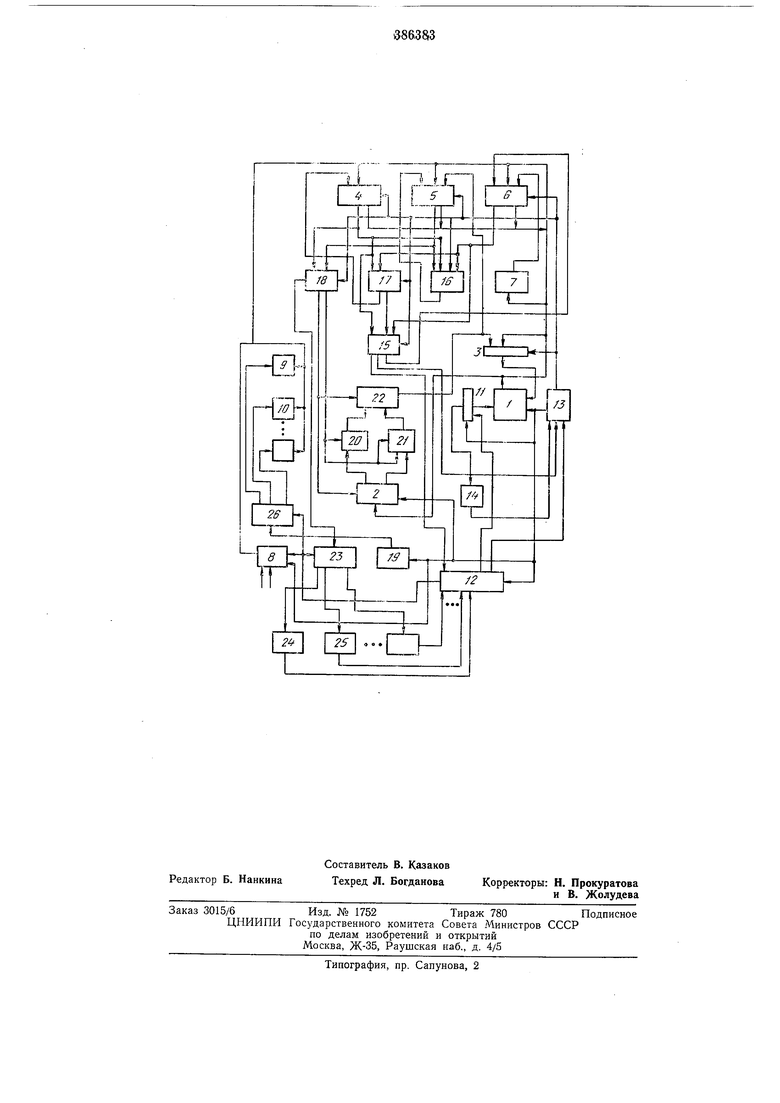
На чертеже показана функциональная схема описываемого интерполятора, который содержит магнитное оперативное запоминающее устройство (МОЗУ) 1, блок 2 коммутации слагаемых, регистр числа 3, регистр команд 4, регистр 5 знаков координат и оценочных функций, регистр состояний 6, схему 7 сравнения и анализа координат, блок 8 связи с ЭВМ, уст1ройство 9, 10 ввода информации с операционного носителя, регистр адреса 11, блок 12 приоритетов автоматических устройств, блок 13 сременной диаграммы интерполятора, дешифратор 14, блок 15 конца интерполирования, блок У переключения квадрантов, блок/7 пространственного интерполирования, блок /8 унитарных кодов, блок 19 управляющих сигналов устройств ввода, одноразрядный сумматор 20 модификации координат, одноразрядный сумматор 21 вычисления оценочной функции, блок коммутации 22 результатов сложения, блок коммутации 23 унитарных КОДов, автоматические устройства 24 и 25, блок коммутации 26 управляющих сигналов устройств ввода информации с операционного носителя. Работа интерполятора осуществляется следующим образом.,
В блок приоритетов 12 от одного или нескольких автоматических устройств 24, 25 поступает запрос на формирование унитарного кода очередного элементарного перемещения. Из нескольких устройств, от которых поступили
запросы, выбирается наиболее приоритетное, то есть на выходе блока приоритетов 12 появится потенциал номера наиболее приоритетного из этих устройств. Потенциал поступает на блок коммутации 23 унитарных кодов, который коммутирует сформированный унитарный код на блоки управления приводами рабочего органа этого устройства. Кроме этого, потенциал номера устройства поступает на блок 8 связи с электронно-вычислительной машиной, на блок коммутации 26 управляющих сигналов устройств ввода.
Это сделано для того, чтобы можно было сразу после формирования унитарного кода приступить к вводу очередного кадра данного
устройства из соответствующего устройства 9, 10 ввода информации или непосредственно из ЭВМ через блок 8 связи с ЭВМ, если отрабатываемое элементарное перемещение для данного устройства окажется последним в кадре.
Одновременно с появлением потенциала номера устройства запускается блок 13 временной диаграммы, а затем по сигналу из блока 13 в регистр адреса 11 из блока приоритетов 12 заносится код начального адреса зоны памяти в МОЗУ, относящейся к данному устройству. После занесения в регистр адреса 11 кода начального адреса зоны памяти блок 13 временной диаграммы генерирует управляющие сигналы, в соответствии с которыми производится считывание из МОЗУ / и прием в регистры; команд 4, знаков 5, состояний 6 информации из трех первых числовых линеек зоны памяти данного устройства. Выходы триггеров регистров соединены со
входами основных логических блоков интерполятора; блока 18 унитарных кодов и управления суммированием, блока 17 пространственного интерполирования, блока /б переключения квадрантов, блока 15 конца интерполирования. После приема информации в регистры 4, 5, 6 при условии, что блок конца интерполирования по информации, поступивщей из регистра состояний 6 и регистра команд 4, не выдает сигнала окончания кадра в блок /5временной диаграм-мы, по сигналу последнего блок 18 сформирует и пошлет унитарный код элементарного перемещения с помощью блока К01ммутации 23унитарных кодов, управляемого потенциалом номера устройства из блока приоритетов 12, на соответствующее устройство 24, 25.
После этапа формирования унитарного кода следует этап вычисления оценочной функции, модификации и анализа координат. Для вычисления оценочной функции по сигналам из
блока 13 временной диаграммы производится последовательное считывание числовых линеек зоны МОЗУ /, следующих за первыми тремя числовыми линейкаМИ, и содержащих значения координат начала и конца отрезка интерполирования и значения оценочных функций, начиная с младших разрядов.
Содержимое этих числовых линеек считывается из МОЗУ 1 и поступает в регистр числа 5 и на блок 2 коммутации слагаемых, который выдает на одно-разрядный сумматор 20 модификации .координат и па одноразрядный сумматор 21 вычисления оценочной функции разряды модифицируемой координаты, разряды координаты, участвующей в вычислении значения оценочной функции после i-ro щага интерполирования и разряды значения оценочной функции после (г-1) -го шага интерполирования.
Выбор соответствующих координат и оценочной функции осуществляется в блоке 2 коммутации слагаемых по управляющим сигналам, поступающим из блока 18 унитарных кодов и управления сложением. Эти же сигналы управляют коммутацией результатов модификации и вычисления оценочной функции. Очередные разряды результатов модификации координаты и вычисления оценочной функции с выхода сумматоров 20 и 21 через блок коммутации 22 результатов сложения и модификации поступают на соответствующие триггеры регистра числа 3, хранящие значения разрядов модифицируемой координаты по модификации и оценочной функции после (i-1)-го щага интерполирования, и корректируют значения этих разрядов.
После этого содержимое регистра числа 5 по сигналу из блока 13 временной диаграммы отсылается в МОЗУ / и записывается по тому же адресу, откуда было считано.
Таким образом, в результате последовательного считывания из МОЗУ / чисел, содержащих разряды координат и оценочных функций, последовательной обработки этих разрядов, начиная с младщего на сумматорах 20, 21 и записи результата в МОЗУ /, в последнем после окончания цикла считывания и обработки в соответствующих разрядах чисел, хранящих разряды координат и оценочных функций, находятся разряды нового значения оценочной функции и модифицированной координаты.
Информация о знаковых разрядах, хранящихся в регистре знаков 5, поступает в «онце цикла вычисления на .сумматор 21 через блок 18 унитарных кодов и управления сложением, а результат обработки знаковых разрядов слагаемых, участвующих в вычислении нового значения оценочной функции, поступает из блока коммутации 22 на входы соответствующих триггеров регистра знаков 5.
За этапом вычисления, модификации и анализа следует этап коррекции и записи в МОЗУ / состояний триггеров регистров команд 4, знаков 5 и состояний 6. После вычисления оценочной функции результат сложения знаковых разрядов из сумматора 21 через блок коммутации 22 поступает на вход соответствующего триггера знака оценочной функции в регистре знаков 5, сигналы из схемы сравнения и анализа координат поступают на входы триггеров регистра состояний 6 при наличии равенства друг другу соответствующих координат или при равенстве какойлибо текущей координаты нулю; сигналы из
блока 16 переключения квадрантов поступают на входы соответствующих триггеров регистра знаков 5, изменяя их состояние и тем самым корректируя номер квадранта, в котором находится рабочий орган, при переходе послетнего из квадранта в квадрант, сигнал из блока //пространственного интерполирования поступает на входы триггеров плоскостей интерполирования и направления движения регистра команд 4, управляя тем самым очередностью
.ц
формирования унитарных кодов но каждоп из трех координатных осей. После коррекции содержимого регистров 4, 5, 6 по сигналу блока 13 временной диаграммы из блока приоритетов /2-повторно заносится в регистр адоеса 11
код начального адреса зоны памяти данного автоматического устройства и начинается запись в МОЗУ / содержимого регистра команд 4, регистра знаков 5, регистра состояний б nvтем опроса регистров из блока 13 временной
диаграммы и приема информации на регистр числа 3, а затем выдачи содержимого последнего в .МОЗУ /. После этого потенциал номепя устройства в блоке приоритетов 12 снимается и, если есть запросы на формирование унитарных кодов для других устройств, то выщеописапный процесс повторяется для самого приоритетного из устройств. В случае, еспи после чтения и приема на регистры содержимого трех первых числовых линеек зоны памяти по состоянию тоиггеров регистра состояний блок 15 конца интеополиоования выдает сигнал последнего элементарного перемещения в блок 13 временной диаграммы, то наиболее приоритетным из всех устройств становится
устройство 9, 10 врода информации автоматического устройства, для -которого интерполятор кончил отработку кадпа. Сигналы, лПРавляюшие устройством вводя 9. 10, поступают из блока 19 управляющих сигналов через
блок коммутации 26 управляющих сигналов, управляемый потенциалом -номера устройства из блока приоритетов 12, на соответствующее устройстве ввода 9, 10. Если интерполятор работает в ЭВМ, то потенциал номера устройст:ва поступает на блок 8 связи с ЭВМ. Выходы устройств ввода 9, 10 и блока 8 соединены кодовыми шинами числа со входами регистра числа 3, через который производится запись информации в МОЗУ /.
Предмет изобретения
Многоканальный интерполятор для управления перемещениями рабочих органов автоматических устройств, содержащий магнитное оперативное запоминающее устройство с регистром числа и регистром адреса; дешифратор, схему сравнения .« анализа координат, регистр «омаид, один из выходов которого соединен со входом блока переключения Квадрантов, соответствующие выходы которого соединены с регистром знаков координат и оценочных функций -и с реристром состояний; блок конца интерполирования, соединенный с блоком временной диаграммы интерполятора; блок унитарных кодов, выходы которого соединены с управляющими входами одноразрядного сумматора модификации координаты и сумматора вычисления оценочной функции; блок приоритетов автоматических устройств, блок связи с ЭВМ, блок управляющих сигналов устройств ввода .и устройства ввода информации с операционного носителя, отличающийся тем, что, с целью повыщения производительности и эффективности использования оборудования, интерполятор дополнительно содержит блок коммутации слагаемых, блок коммутации результатов сложения, блок коммутации унитарных кодов и блок коммутации управляющих сигналов устройств ввода, причем управляемые входы блока коммутации слагаемых, регистра команд, регистра знаков координат и оценочных функций, регистра состояний, схемы сравнения и анализа координат и регистра числа соединены с выходами усилителей магнитного оперативного запоминающего устройства, выходы схемы сравнения и анализа координат соединены с соответствующими входами регистра состояний, выходы блока связи с ЭВМ, }стройств ввода информации, регистра команд, регистра знаков координат и оценочных функций, регистра состояний соединены с управляемыми входами регистра числа, выходы блока ком мутации результатов сложения соединены со входами регистра числа и регистра знаков координат и оценочных функций, входы одноразрядных сумматоров модификации координат и вычислений оценочной функции соединены с соответствующими выходами блока коммутации слагаемых, а выходы - с соответствующими
входами блока коммутации результатов сложения, причем управляющие входы блока коммутации слагаемых и блока коммутации результатов сложения соединены с соответствующими выходами блока унитарных кодов, входы регистра адреса соединены с выходами блока .приоритетов, а выходы-со входам-и дещифратора, который соединен с соответствующ-ими входами блока временной диаграммы, выходы последнего соединены с управляющими входами регистра команд, регистра знаков координат и оценочных функций, регистра состояний, регистра числа, блока пространственного интерполирования, блока .конца интерполирования, блока переключения квадрантов и блока унитарных кодов, соединенного со входами блока коммутации унитарных кодов, выходы которого соединены со входами блоков управления приводами рабочих органов автоматических устройств, а управляющие входы блока кОМмутации унитарных кодов блока связи с ЭВМ и блока коммутации управляющих сигналов устройств ввода соединены с выходами блока приоритетов, входы которого соединены с выходами автоматических устройств, выходами блока конца интерполирования и блока временной диаграммы, выходы блока пространственного интерполирования, соединены со входами блока конца интерполирования и со входами регистра команд, а входы-с выходами регистра состояний и регистра команд выходы блока конца интерполирования соединены со входами регистра состояний, а входы - с регистром комайд и регистром состояний, соответствующие выходы блока временной диаграммы соединены со входами блока связи с ЭВМ, блока коммутации слагаемых, регистра адреса, магнитного оперативного запоминающего устройства и блока управляющих сигналов устройств ввода, выходы которого соединены со входами блока коммутации управляющих сигналов устройств ввода, а выходы последнего соединены с управляющими входами устройств ввода информации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления группой станков | 1970 |
|
SU871745A3 |
| Устройство для формирования окружностей | 1983 |
|
SU1096688A2 |
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Устройство для изготовления цветных тест-оригиналов | 1974 |
|
SU557514A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Устройство для формирования окружностей | 1981 |
|
SU991486A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| Круговой интерполятор | 1989 |
|
SU1665343A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |