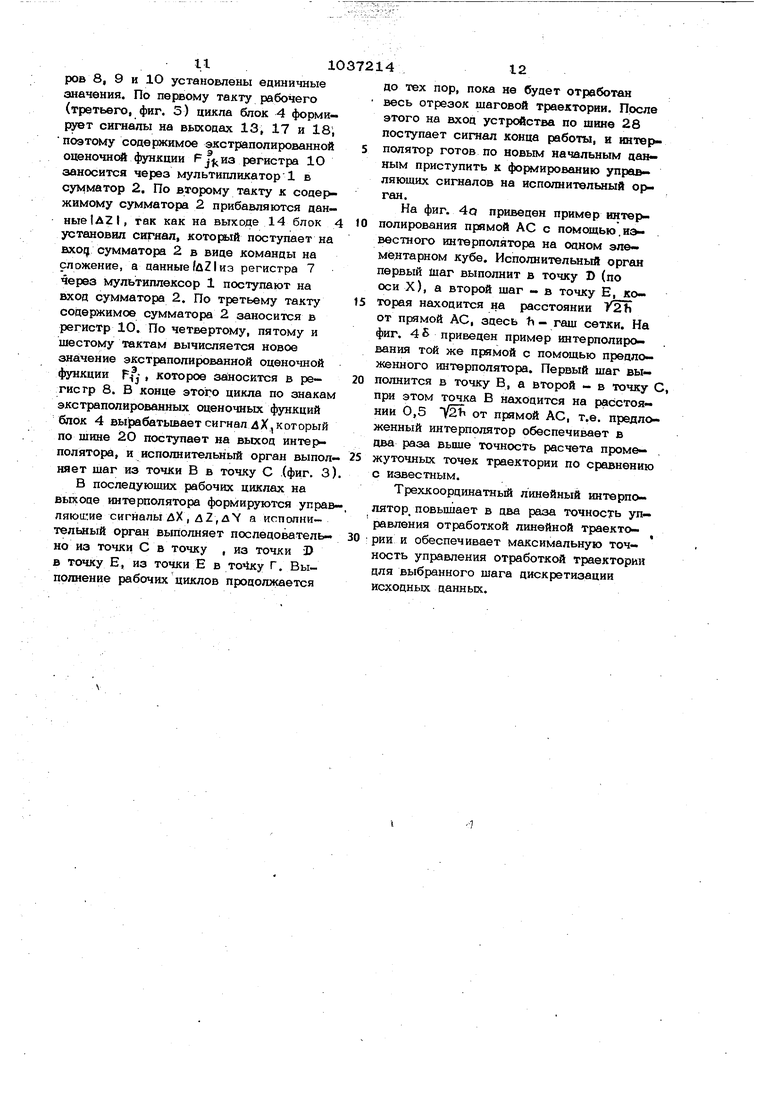
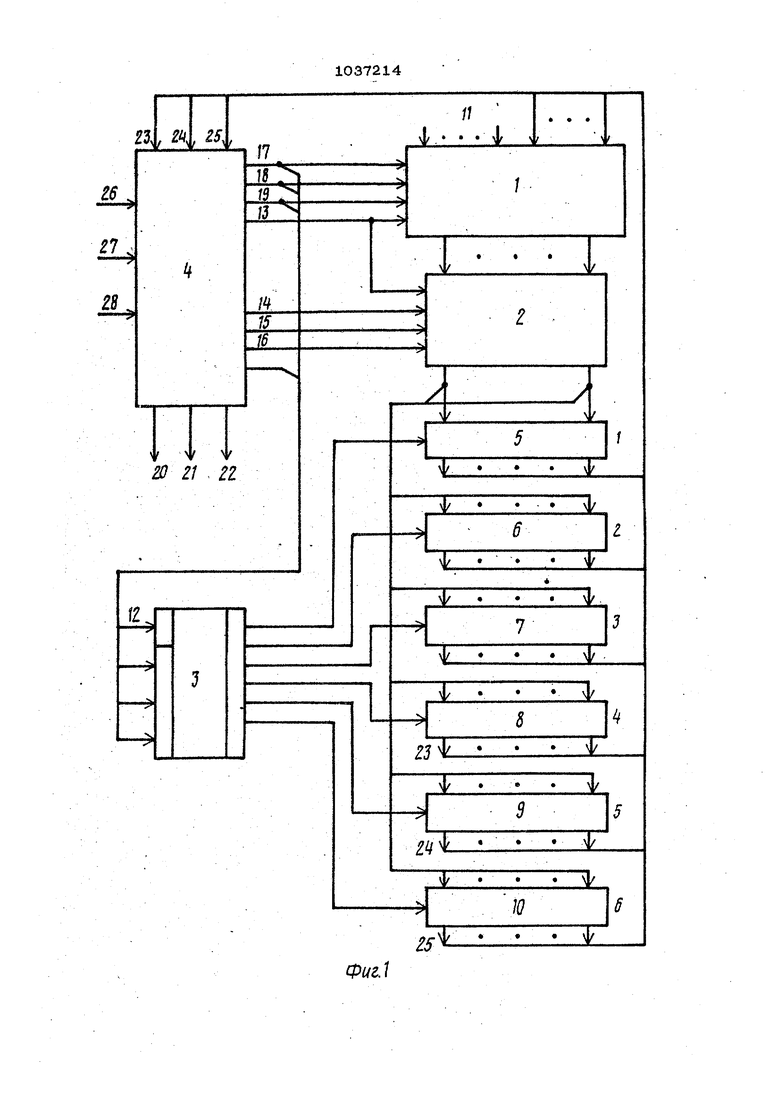
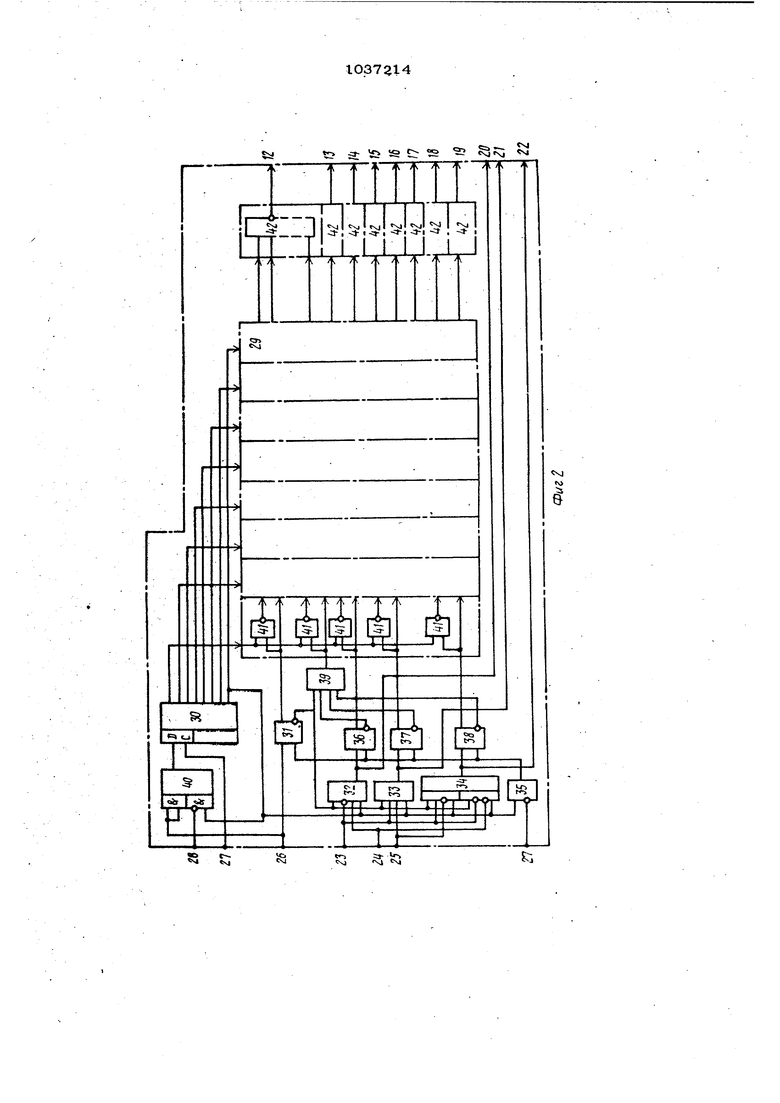
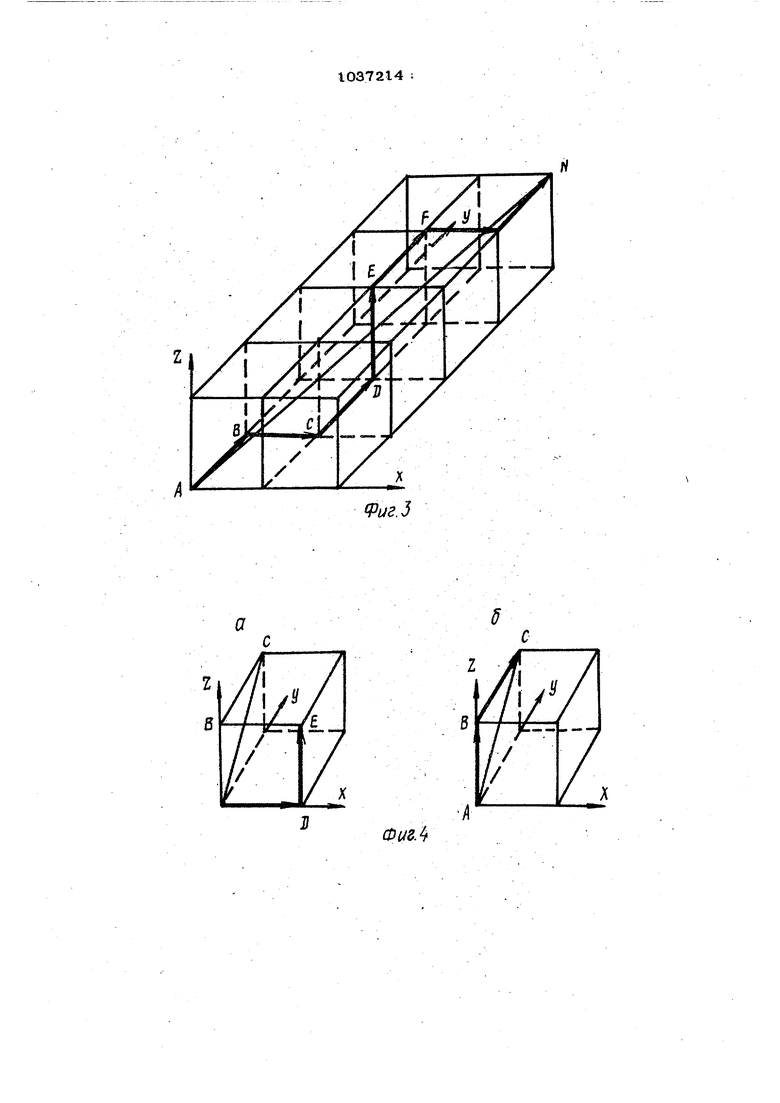
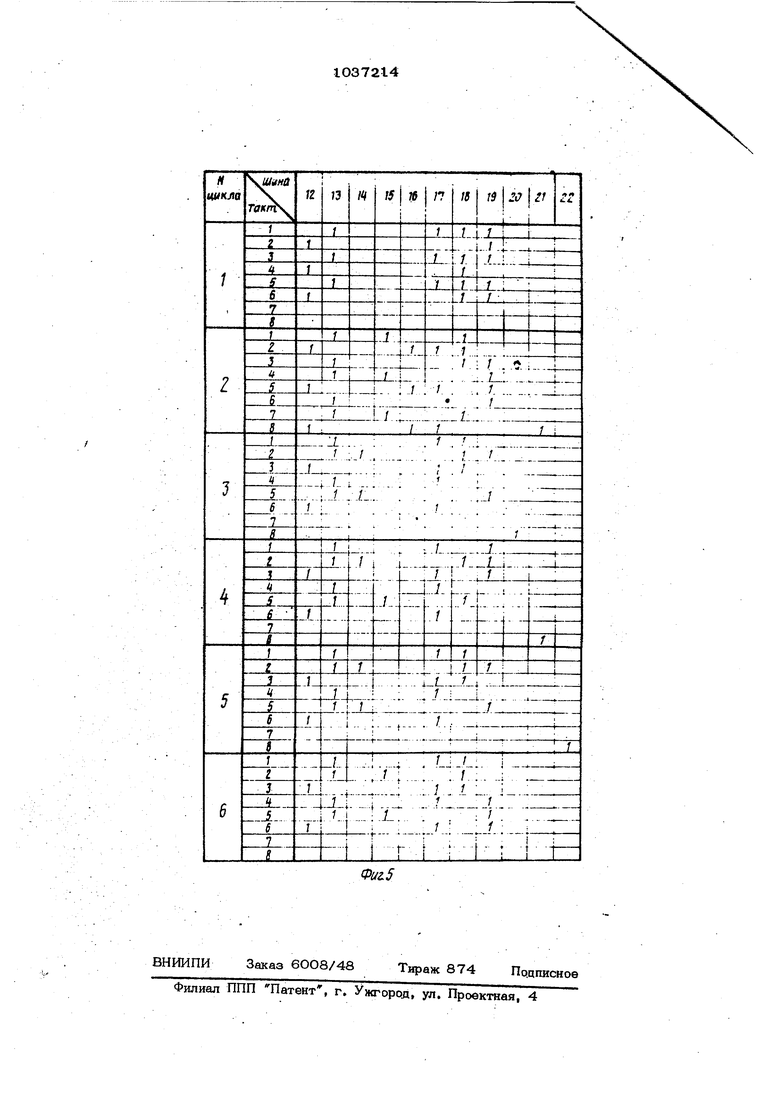
со tc Изобретение относится к области автоматики и цифровой вычислительной техники, дао может быть использовано в системах числового программного управления движением, исполнительного органа по цвум или трем координатам. Известен линейный интертолятор, содержащий программный блок, блоки вентилей, сумматоры, счетчики, регистры, блок анализа знака Однако этот интерполятор не обеспечивает максимальной точности расчета промежуточных точек траектории и не обеспечивает формирование траекторий п трем координатам. Наиболее близким по технической сущ ности к изобретению является трехкоординатный линейный интерполятор, со держащий регистры, сумматоры, схемы .совпадения, блоки определения знаков 01ЮНОЧНЫХ функций, счетчик перемещений С2 . Сущность формирования траекторий с прмощью известного интерполятора заключается в расчете трех оценочных функ ций, причем сигналы на элементарные п ремещения испотаительного органа формиру1ртся в зависимости от знаков этих оценочных функций. Недостатком известного интерполятора является то, что он не обеспечивает максимальной точности расчета промежу точных точек траектории. Так, в начале отработки траектории первая же промежуточная точка выбирается не всегда правильно. Это происходит из-за того, что все сумматоры в исходном состоянии сбрасываются в нуль и блок определения знаков оценочных функций устанавливается в такое положе ние, что открыт канал выдачи шагов по оси X, каналы выдачи шагов по осям У и Z закрыты. Другие промежуточные точки траектории, несмотря на отсутстви накапливающейся ошибки, также расчи- тьшаются не точко. Это происходит изза того, что оценка положения промежуточных точек траектории по отношению к идеальной прямой вьтолняется по оценоч нымофункциям в точке стояния исполнительного органа, а не по экстраполирова ным оценочным функциям. Цель изобретения повышение точности интерполятора за счет расчета промежуточных точек траектории. Поставленная цель достигается тем, что в Трехкоординатный линейный интерполятор, содержащий сумматор, первый. второй и третий регистрьт, введены три регистра, дешифратор, мультиплексор и блок программ, подключенный первым, вторым и третьим адресными выходами к соответствуклцим первым входам мультиплексора и к первым входам дешифратора, а четвертым адресным выходом к второму входу мультиплексора и к nefvвому управляющему входу сумматора, соединенного вторыми управляющими входами с первыми командными выходами блока программ, информационными входами - с выходами мультиплексора, а выходами - с информационными входами первого, второго, третьего, четвертого, пятого и шестого регистров, подключенных управляющими, входами к выходам дешифратора, связанного вторым входом с вторым командным входом блока программ, подключенного первым, вторым и третьим входами к выходам соответственно четвертого, пятого и шестого регистров, причем выходы первого, второго, третьего, четвертого, пятого и шестого регистров соединены с BTOJMJIMH входами мультиплексора. На фиг. 1 дана блок-схема трехкоор динатного линейного интерполятора; на фиг. 2 - блок-схема блока программ; на фиг. 3 - пример шаговой траектории, отработанной исполнительным органом} на фиг. 4 (d и 5) - участки шаговых траекторий, отработанные при управлениц известным и предложенным интертолято- рами соответственно; на фиг. 5 - таблица последовательности операций на выходах блока программ. Трехкоординатный линейный интерполя- тор содержит мультиплексор 1, сумматор 2, дешифратор 3, блок 4 программ, первый регистр 5, второй регистр 6, третий регистр 7, четвертый регистр 8, пятый регистр 9, шестой регистр 10, шины 11 числовых В.ХОДОВ, второй вход 12 дешифратора, четвертый адресный выход блока 13 программ, первые командные выходы блока 4 шины программ (сложения, вычитания, сдвиг) 14, 15, 16, первый, второй, третий адресные выходы блока программ 17, 18, 19, шины управления исполнительным органом по координатам х , У и соответственно 20, 21, 22, входы блока программ 4 (знаков экстраполированных оценочных функ- ций F. F, FA) 23, 24, 25, Шину начала работы 26, .шину тактирукяцих сигналов 27, шину конца работы 28,
Блок программ 4 соцержит матрицу элементов И-НЕ 29, регистр сдвига 30 RS - триггер 31, первый и второй элементы И. 32, 33, первый элемент 2И ИЛИ 34, третий элемент И 35, первый, второй и третий D-триггеры 36-38, четвертый элемент И 39, второй элемент 2И-ИЛИ 40,- первые и вторые элементы И-НЕ 41, 42.
Мультиплексор 1 служит для коммутации выхоаных шин любого из регистров 5-1О или вхопных шин 11 на вход сумматора 2. Адрес с любого регистра или шин 11 определяется набором сиг налов на выходах 17, 18, 19. Мульти- плексор может быть выполнен, например на серийно выпускаемых промьпыленностью микросхемах серии 133КП5.
Сумматор 2 служит для вычисления значений экстраполированных оценочных
. F fj , , рД. Команды на выполнение операций сумматором поступают на выход 14, 15 и 16, причем на выходе 14 задается команда на сложение содержимого сумматора с числом, поступающим с мультиплексора 1, на выходе 15 задается команда на вычитание из содеркимого сумматора числа,
.поступающего с мультиплексора 1, на выходе 16 задается команда на сдвиг содержимого сумматора вправо на один разряд, при этом знаковый разряд не сдвигается. Сумматор 2 может быть выполнен например, на серийно выпускаемых промышленностью микросхемах 133ИМ1.
Дешифратор 3 служит для разрешения записи а любой из регистров 5-1О числа из сумматора 2. Адрес регистра определяется набором сигналов на вы- ходах 17, 18, 19 блока 4. При наличии сигнала на входе 12 дешифратор по набору сигналов на выходах блока 4, 17 18, 19k формирует на выходе сигнал на один из регистров и содеркимое сумматора 2 заносится в этот регистр. Дешифратор 3 может быть вьшолнен, напри- мер, на серийно выпускаемьгх промышленностью микросхемах 133ИДЗ. I-,
Наличие сигналов на i -ой строке
и J-M столбце матрицы 29 определяет набор сигналов на элементах И-НЕ 41, 42, с помощью которых на выходахшинах 12-19, поступающих на управление работой интерполятора, формируется соответствующая программа управления. ,На исполнитель: ый орган сигналы поступают по такту ТВ по шинам 20, 21,
22 в зависимости от режима работы интерполятора,
Регистры 5-1О служат для хранения начальныч ааннык дК|, )ЛVJ, 1Д2 отрабатываемой траектории и экстраполированных оценочных функций F :, F Д, F ji, знаки которых по входам 23, 24 25 поступают на вход блока программ 4
В процессе формирования отрезков прямолинейных траекторий используются знаки экстрапрлированных оценочных функций, значения которых вычисляются следующим образсаи
П UXi i/iYJ F.j (Я j 0J
riUZl.-IluXi -.Ff
:Э
(2
ilc
. 3)..
, lAYIi MZi- мояупк прнраще-кий координат между крайними () точками формируемого отрезка траектории; .
irO, |ДХ| ; j 0j |лУ1 ; ,JaZj - последовательные номера узловых точек формируемого отрезка;
F.-, РД, F j -значения экстраполированных оценочных функций в точках (, ). (.i), (..1c+f) cooTw . ветственно;.
Гзнач 0.( (4) , pkнc ч И/ЛZ|-|ЛX,t) (5)
I ) Ь
- начальные значения зкстряполирован-
ных оценочных функций при , , tt OФормирование управляющих сигналов для исполнит еяьного органа, выполняющего элементарные шаги ДХ,( Л2. при отработке траектории, осуществляется в соответствии с данными табл. 1.
Таблица
О
О О
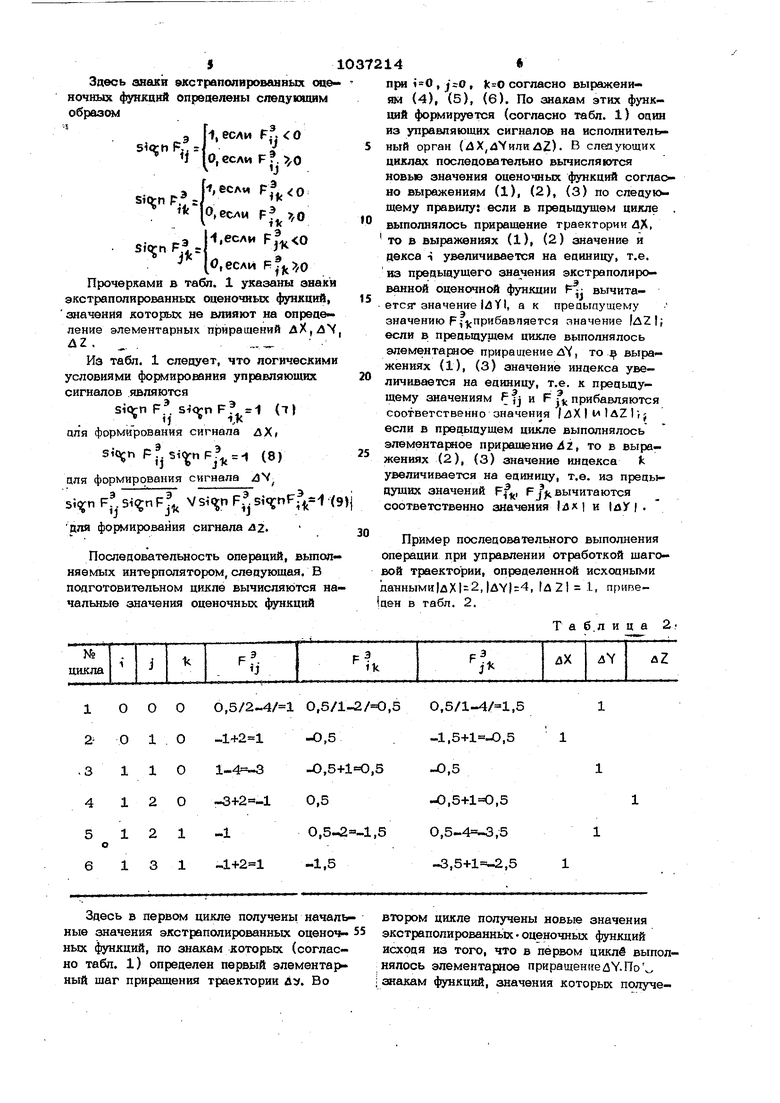
О 1 Здесь дкстраполироваввых о ночных функций опрепелены слеаукнци обрезом 3hi О 54fiP- lУ 4ДО, если Ff. ,о . - Чеслм Ff.o 1,если (О.есАй Прочерками в табл. 1 указаны зна экстраполированных оценочных функци значения которых не влияют на опреа ление элементарных приращений дХ,Л Л Z , . Иа табл. 1 следует, что логически условиями формирования управляющих сигналов являются .. 1 (71 аля формирования сигнала ЛХ, SiQgn Р. (8) для формирования сигнала 4V 54 Vsi(5nFf. для формирования сигнала л2. Последовательность операций, вьш няемых интерполятором, следующая. В подготовительном цикле вычисляются чальные значения оценочных функций прп , jrO , согласно выражениям (4), (5), (6). По знакам этих функций фо :ж1Ируется (согласно табл. 1) оцин из управляющих сигналов на исполнителе ный орган (4Х,л илнЛ2). В следующих циклах последовательно вычисляются НОВЫ9 значения оценочньсх функций согласно выражениям (1), (2), (3) по следующему правилу: если в предыдущем цикле . выполнялось приращение траектории йК, то в выражениях (1), (2) значение и декса -1 увеличивается на единицу, т.е. из предыдущего значения экстраполированной оценочной функции вычитается- значение 14 У I, а к преаыцущему значению Ff1 пpибaвпяeтcя значение |д2|; если в предыдущем цикле выполнялось элементарное приращение дЧ, то выражениях (1), (З) значение индекса увеличивается на единицу, т.е. к предьщущему значениям Pfj и F Д прибавляются соответственно значения I кlAZ 1; j если в предыдущем цикле выполнялось элементарное приращение 42, то в выражениях (2), (3) значение индекса k увеличивается на единицу, т.е. из предыдущих значений Ff, РД вычитаются соответственно значения 1йж1и 1лУ|. Пример последовательного выполнения перации при управлении отработкой щагоой траектории, определенной исходными а-нными|лХ1 2, , 1л21 I, привеен в табл. 2. Т а б.л и ц а 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования шаговых траекторий | 1979 |
|
SU930262A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Интерполятор | 1978 |
|
SU798729A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Устройство для интерполяции и кусочно- линейной аппроксимации | 1977 |
|
SU734709A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Генератор элементарных функций | 1975 |
|
SU596934A1 |
ТРЕХКООРДИНАТНЫЙ ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР, содержащий сумматор, первый, второй и третий регистры, отличающийся тем, что, с целью повышения точности инте| полятора, в него введены три регистра, дешифратор, мультиплексор и блок программ, подключенный первым, вторым и третьим адресными выходами к соответствующим первым входам мультиплексора и к первым входам аещифратора, а четвертым адресным выходом - к второму входу мультиплексора и к первому управляющему входу сумматора, соеаиненного вторыми управляющими входами с первыми командными выходами блока программ, информационными входами - с вьосодами мультиплексора, а выходами с информационными входами первого, второго, третьего, четвертого, пятого и щестого регистров, подключенных управляющими входами к выходам дешифратора, связанного вторым входом с втчзрым командным выходом блока программ, подключенного первым, вторым и третьим входами к выходам соответственно четвертого, пятого и шестого регистров, (Л причем выходы первого, второго, третьего, четвертого, пятого и шестого с регистров соединены с вторыми входами мультиплексора.
Здесь в первом цикле получены начальные значения экстраполированных оценоч- 55 ных функций, по знакам которых (согласно табл. 1) определен первый элементар ный шаг приращения траектории лу. Во
втором цикле получены новые значения экстраполированньос оценочных функций исходя из того, что в первом цикле выпол;Нялось элементарное приращениеi3Y. По знакам функций, значения которых получены во втором цикле, определено (согласно табл. 1) второе элементарное прираще - .ниедХи т.д.
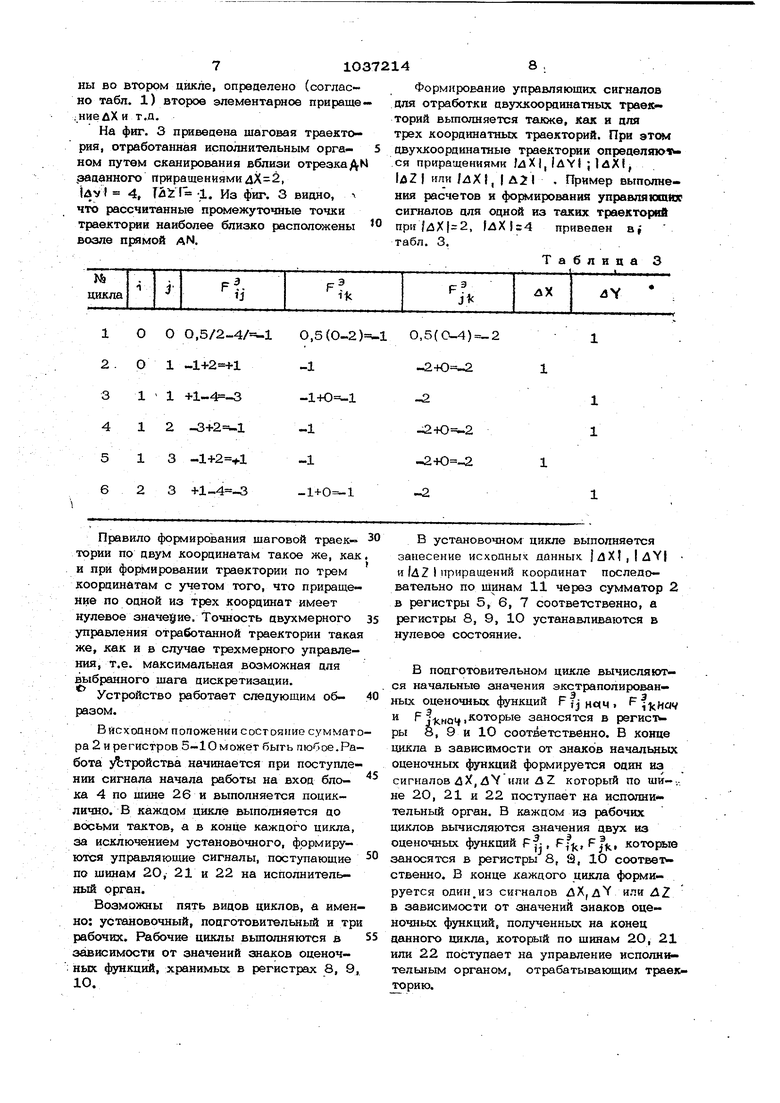
На фиг. 3 приведена шаговая траектория, отработанная исполнительным органом путем сканирования вблизи отрезкаДМ ,зааанного приращениями , jdv I 4, Тл Г -1. Из фиг. 3 видно, что рассчитанные промежуточные точки траектории наиболее близко расположены возле прямой AN.
1 О О 0,5/2. 0,5(0-2)wl О,5(О-.4)2 2. 01 -1+2 +1-1-2+0 -2 Правило формирования шаговой траек- тории по двум координатам такое же, как и при формировании траектории по трем координатам с учетом того, что приращение по одной из трех координат имеет нулевое значе|;ие. Точность двухмерного управления отработанной траектории такая же, как и в случае трехмерного управления, т.е. максимальная возможная для выбранного шага дискретизации. Устройство работает следующим образом. Вйсхопном попоженни состояние суммат ра 2 и регистров 5-10 может быть пюбое.Работа устройства начинается при поступлении сигнала начала работы на вход блока 4 по шине 26 и выполняется поциклично. В каждом цикле выполняется до восьми тактов, а в конце каждого цикла, за исключением установочного, формируются управляющие сигналы, поступающие по шинам 2О, 21 и 22 на исполнительный орган. Возможны пять видов циклов, а имен но: установочный, подготовительный и тр рабочих. Рабочие циклы вьшолняются в зависимости от значений знаков оценоч: ных функций, хранимых в регистрах 8, 9 10.
Формирование управляющих сигналов для отработки цвухкоординатных траекторий вьшолняется также, как и для трех координатных траекторий. При зтом двухкоординатные траектории определяются приращениямк 1лX), lAYl ; 1лХ1, 1л2 I или /ЛХ|, I Л21 . Пример выполнения расчетов и формирования управляющих сигналов для одной из таких траекторий прнМХ| 2, |ЛХ|г4 приведен в табл. 3..
Таблица 3 В установочном цикле выполняется занесение исхоанык данных |лХ1,|дУ| и/42 I приращений координат последовательно по шинам 11 через сумматор 2 в регистры 5, 6, 7 соответственно, а регистры 8, 9, Ю устанавливаются в нулевое состояние. В подготовительном цикле вычисляются начальные значения экстраполированных оценочных функций F f j , ixHav и F jXHQ4,которьге заносятся в регист ры 8, 9 и 1О соответственно. В конце цикла в зависимости от знаков начальных оценочных функций формируется один из сигналов зХ, Л V или л Z который по ши-,, не 2О, 21 и 22 поступает на исполни тельный орган. В каждом из рабочих циклов вычисляются значения двух из оценочных функций Ffj, Ff, F, KOTOfa ie заносятся в регистры 8, S, 10 соответ ственно. В конце каждого цикла формируется один,из сигналов ЛХ,л или Д2 в зависимости от значений знаков оценочных функций, полученных на конец данного цикла, который по шинам 20, 21 или 22 поступает на управление исполнительным органом, отрабатывающим траекторию. Работу устройства рассмотрим на примере управления двил ением исполнительного органа при исходных цан- ,ных(лХ| 2 1-лХ|г4. |д2| 1 приращений коорд1шат. В табл. 4 приведены one рации, послецовательио вьтолняемые устройством при формировании управляющих сигналов по йыходам 12-22. Эти сигналы вырабатывает блок 4 в зависимости от значений знаков оценочнь1х функций, поступающих на входы блока программ 4 по шинам 23, 24, 25 со зна ковых разрядов регистров 8, 9 и 10. При поступлении на вход устройства по шине 26 сигнала начала работы начи нается установочный цикл. По шине 27 вход устройства поступают тактирующие сигналы. По первому такту установочного (первого, фиг. 5) цикла блок 4 вырабатывает сигналы на выходах 13, 17, 18 и 19. Сигнал на выходе 13 соотвеь ствует чтенрю канала с адресом, определенным сигналами, поступающими на выходы 17, 18 и 19. Таким образом, по первому такту аанные(дХ1посту- пающие на вход шины 11 устройства по шинам 11 через мультиплексор 1, засылаются в сумматор 2. По второму такту этого цикла блок 4 вырабатывает сигналы на входах и выходах 12 и 19. Сигнал на входе 12 соответствует занесению содержимого сумматора 2 в один из регистров, адрес которого определяется набором сигналов на выходах 17, 18, 19 и дешифратором 3. ТаКИМ образом, по второму такту данные |дХ1 заносятся в регистр 5, Ана логично по третьему такту данные |лУ1 поступающие на вход устройства по шинам 11, заносятся в сумматор 2, а по четвертому такту эти данные заносятся в регистр 6. По пятому такту данны |й21,поступающие на вход устройства по шинам 11, заносятся в сумматор 2, а по шестому такту эти данные заносят ся в регистр 7. По седьмому такту ре-, гистры 8, 9 и 10 устанавливаются в нулевое состояние. По восьмому такту в блоке 4 вырабатывается сигнал конца шиша, и блок 4 подготовлен к выполне- нию подготовительного (второго, фиг. 5 цикла. По первому такту подготовительного (второго, фиг. 5) цикла блок 4 формиру сигналы на выходах 13, 15 и 18. Сигнал на выходе 15 поступает на управляю щий вход сумматора 2 в виде команды Вычесть. Таким образом, по этому такту на данных (4 Z I , находящихся в сумматоре 2 после выполнения пятого такта предыдущего цикла, вычитаются данные. |лУ|, поступающие на вхоа сумматора 2 через мультиплексор 1 из регистра 6. По второму такту подготовительного цикла блок 4 формирует сигналы на выходах 12, 16, 17, 18. Сигнал на выходе 16 поступает на управляющий вход сумматора 2 в виде команды сдвига содержимого сумматора (кроме знакового разряда) на один разряд вправо. Полученное в сумматоре 2 значение экстраполированной оценочной функции Ffjuaq заносится в регистр 8, так как на вход дешифратора 3 в это время поступают сигналы с выходов 12 и 17 и 18 блока 4, указывающие адрес регистра 8. Потретьему,четверг ому и пят ому тактам подготовительного никла данные ,.1Л7 f из регистра 7 через мультиплексор 1 заносятся в сумматор 2, затем из этих данных вычитаются данные |дХ1,поступающие через мультиплексор 1 на вход сумматора 2, и полученный результат сдвигается (кроме знакового разряда) на один разряд вправо. Полученное значение экстраполированной оценочной функции ,y .заносится в регистр 9. Аналогишо по шестому, седьмому и восьмому тактам подготовительного цикла данные (лХ из регистра 5 через мультиплексор 1 заносятся в сумматор 2, затем из этих данных вычитаются данные . После савига ( кроме знакового разряда) полученного результата значение экстраполированной оценочной 4ункции Fjjj нам заносится в регистр 10. По значениям знаков, полученных экстраполированных оценочных функций блок 4 на шине 21 сформирует сигнал дХ по которому исполнительный орган отработает шаг из точки А в точку В (фиг. 3). По последнему такту цикла сформулируется сигнал конца цикла и блок 4 подготавливается к выполнению рабочего Каждый из рабочих циклов определяется знаками экстраполированных оценочных функций, хранимых в регистрах 8,9, 10 и вычисляемых согласно соотаоше- иям (7, (8), (9). В зависимости от этих знаков блок 4 формирует управляюие сигналы на выходах ±2-2,2. Наприер, если знаки всех экстраполированных ценочных функций имеют отрицательное начение, то в знаковых разрядах регист
ров S, 9 и lO установлены единичные значения. По первому такту рабочего (третьего, фиг, 5) цикла блок 4 формирует сигналы на выходах 13, 17 и 18, поэтому содержимое экстраполированной оценочнсА функции Fj из регистра 10 заносится через мультипликатор 1 в сумматор 2. По второму такту к содержимому сумматора 2 прибавляются данные lAZI, так как на выходе 14 блок 4 установил сигнал, который поступает на вхоц сумматора 2 в виде команды на сложение, а аанные1л21из регистра 7 через мультиплексор 1 поступают на вход сумматора 2. По третьему такту содержимое сумматора 2 заносится в регистр 10. По четвертому, пятому и шестому тактам вычисляется новое ачение экстраполированной оценочной функцкк рЛ , которое заносится в регисгр 8. В конце этого цикла по знакам экстраполированных оценочных функций блок 4 вырабатьшает сигнал 4X,который по шине 2О поступает на выход инте{ полятора, и исполнительный орган выпол няет шаг из точки В в точку С .(фиг. 3
В последующих рабочих циклах на вькоде интерполятора формируются управ ляюшие сигналы ДХ, д2,д а исполнительный орган выполняет последовательно из точки С в точку , из точки -Р в точку Е, из точки Е в то1ку Г. Выполнение рабочих циклов продолжается
до тех пор, пока не будет отработан весь отрезок шаговой траектории. После этого на вход устройства по шине 28 поступает сигнал конца работы, и интерполятор готов по новым начальным данным приступить к формированию управляюших сигналов на исполнительный .
На фиг. 4(3 приведен пример интерполирования прямой АС с помощью.известного интерполятора на одном элементарном кубе. Исполнительный орган первый шаг выполнит в точку D (по оси X), а второй шаг - в точку Е .которая находится на расстоянии У2Ь от прямой АС, здесь Ь - гаш сетки. На фиг. 4 приведен пример интерполирования той же прямой с помошью предложенного интерполятора. Первый шаг выполнится в точку В, а второй - в точку при этом точка В находится на расстоянии 0,5 VS от прямой АС, т.е. предложенный интерполятор обеспечивает в два раза выше точность расчета промежуточных точек траектории по сравнению с известным.
Трехкоординатный линейный интерполятор, повышает в два раза точность управления отработкой линейной траектории и обеспечивает максимальную точность управления отработкой траектории для выбранного шага дискретизации исходных данных.
t6
MMMMW
7
«вмша
2Я
Фиг.
«Ni
t : cxj 4i «S
r.
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU401964A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ТРЕХКООРДИНАТНЫЙ ЦИФРОВОЙ ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 0 |
|
SU271903A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
